
凝汽器汽侧和水侧联通管仿真研究
2022-03-26 07:37宋柯
电子元器件与信息技术 2022年1期
宋柯
(武汉市瑞思信息技术有限公司,湖北 武汉 430000)
0 引言
凝汽器是核电站二回路最大的热量中转站,其稳定高效的运行为机组的安全及经济性提供了保障。凝汽器的功能主要为将汽轮机的排汽冷凝成水供蒸汽发生器重新使用,以及在汽轮机排汽处建立真空和维持真空[1-4]。一般地,核电厂汽轮机由二个或三个低压缸组成,每个低压缸均连接一台凝汽器。多台结构和参数相同的独立壳体冷凝器在汽侧和水侧各有联通管相联,用于保证各台凝汽器的真空度基本一致,即保证各低压缸的背压基本一致,从而保证各汽轮机低压缸转子的出力均衡。
在对核电站凝汽器系统仿真建模的过程中,对冷凝器汽侧和水侧联通管功能模拟的逼真度直接影响着对核电站二回路特性的模拟效果。
本文采用中核武汉核电运行技术股份有限公司RINSIM仿真平台[5-6],使用凝汽器部件分别对由2台和3台凝汽器组成的凝汽器系统进行仿真建模,采用2种不同建模方法对冷凝器汽侧和水侧联通管功能进行模拟研究,利用模拟机在紧急停机、所有凝汽器真空破坏和丧失所有凝汽器循环冷却水3种工况下仿真结果的对比分析,比较了2种不同建模方法对冷凝器汽侧和水侧联通管功能模拟的优劣。RINSIM仿真平台的仿真部件库中有凝汽器部件,可用于单台凝汽器的模拟。多台凝汽器之间的联通管的模拟一般用图形化建模流网部件库中的边界、节点和连接管线部件来建模,此方法本文称流网部件法。此外也可以根据汽侧和水侧联通管功能编写程序,以质量守恒和能量守恒为基础迭代计算,实现多台凝汽器汽侧和水侧的动态平衡,此方法本文称程序法。一般电厂,不管是2台还是3台凝汽器,它们的压力和液位基本保持一致,瞬态变化时保持同样趋势变化;参考某电厂调试报告和培训教案可以确定,在紧急停机工况下,凝汽器压力和液位先稍微下降后稳定;所有凝汽器在真空破坏工况下,压力会上涨至跳机后最终到常压,液位稍微上升;在丧失所有凝汽器循环冷却水工况下,压力和液位缓慢上涨。本文通过2种不同建模方法得出的仿真结果,并通过与真实变化趋势相比较来判断2种方法的优劣,从而选择更好的建模方法为模拟机的建造提供更高精度的凝汽器系统模型。
1 仿真模型
在正常工况和瞬态工况下,当各低压缸排汽、抽汽、疏水不一致,凝汽器系统的各凝汽器之间的汽侧和水侧质量和能量会出现不平衡的现象,这时冷凝器汽侧和水侧联通管由于两端压差会出现汽、水的流动,从而起到平衡各凝汽器之间的汽侧和水侧压力的作用。联通管内流动是一种非稳态流动,使各凝汽器之间实现动态平衡,从而保证汽轮机各低压缸背压的一致均衡[7-10]。在RINSIM仿真平台上对流网管线模拟时,管线存在节点和边界。节点是一种假设介质均匀混合的介质流空间,边界是参数独立变化的介质空间,用来连接凝汽器内参数,边界与节点连接形成管线,用来平衡各凝汽器的汽侧和水侧,使2台凝汽器的压力液位保持基本一致。程序法是通过两两凝汽器的汽侧和水侧质量和能量平均值迭代计算实现凝汽器之间的动态平衡。
1.1 流网部件法算法
图1为流网管道的简化模型, 和 表示模拟管道节点, 表示两节点间流量。
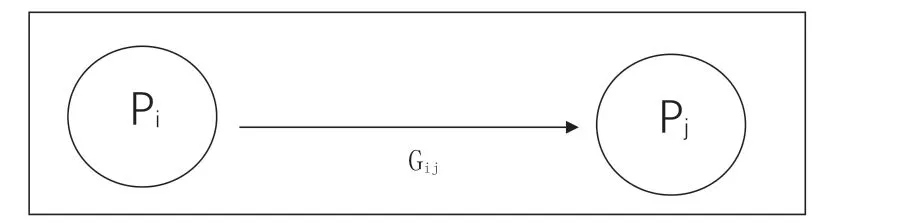
图1 管道 i -j
各守恒方程如下:

流量流向为i→j;m为节点质量;G为管道流量;τ为时间步长;L为管道长度;h为节点比焓;p为节点压力;ρ为节点介质密度;Q为外热源;R为内热源;S为管道横截面积;ξ为水力摩擦系数; 为管道压降; 为管道前后节点高差;
由动量方程(3)求出管线流量,此为流量G的一元二次方程:

1.2 程序法算法
算出所有凝汽器的质量平均值,质量平衡则是本身质量加上计算频率内的净质量;能量平衡则是计算质量平衡后汽侧或水侧凝汽器的焓值;

汽侧平衡时,存在不凝汽的质量平衡,也是通过各凝汽器内不凝汽质量计算出不凝汽平衡,从而达到汽侧不凝汽平衡。
1.3 凝汽器模型输入参数
参考某电厂凝汽器数据在RINSIM仿真平台上使用该平台凝汽器部件模拟电厂凝汽器系统,分别模拟2台凝汽器部件和3台凝汽器部件的系统,并且在RINSIM流网管线建立2台和3台凝汽器部件之间的汽侧和水侧平衡管线;凝汽器数据如表1所示。

表1 凝汽器参数
液位参数按照电厂运行经验稳定在800~900mm之间。
凝汽器系统按照参数调节完成。对于流网部件法,本文利用RINSIM仿真平台图形化建模工具进行汽侧和水侧的联通管建模。对于程序法,利用2.2节的算法程序模拟汽侧和水侧的联通管功能。
2 仿真结果及分析
2.1 不同瞬态下3台凝汽器参数对比
通过模拟电厂停机、所有凝汽器丧失真空和所有凝汽器丧失循环水的特殊工况,监视3台凝汽器的压力和液位,判断3台凝汽器的汽、水平衡是否稳定。
图2和图3分别是停机工况下两种方法模拟3台凝汽器平衡管线压力和液位的表现,上下比较发现相较于程序法,流网法中3台凝汽器压力波动明显,且液位趋势明显不一致。

图2 停机工况下3 台凝汽器的压力和液位变化(流网法)
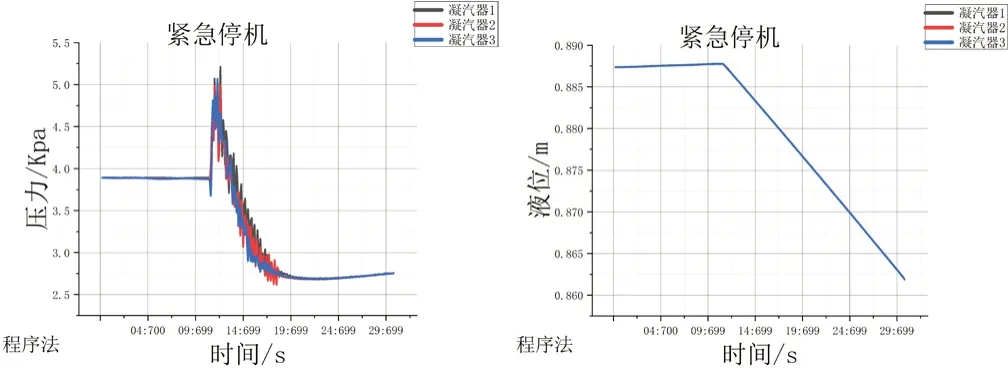
图3 停机工况下3 台凝汽器的压力和液位变化(程序法)
图4和图5为所有凝汽器丧失循环水工况下两种方法在3台凝汽器模拟中的比较;上下比较两种方法压力变化一致;流网法中3台凝汽器液位的变现趋势直接发散,最终很难平衡稳定,程序法中液位变化一致且稳定。
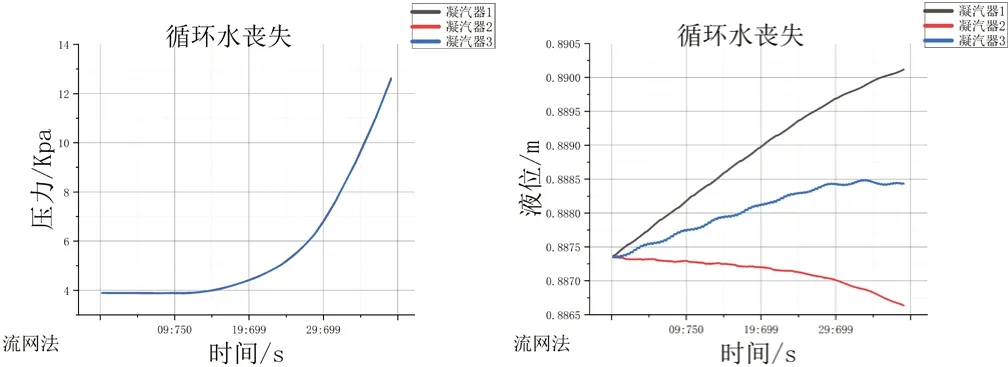
图4 所有循环水丧失工况下3 台凝汽器的压力和液位变化(流网法)
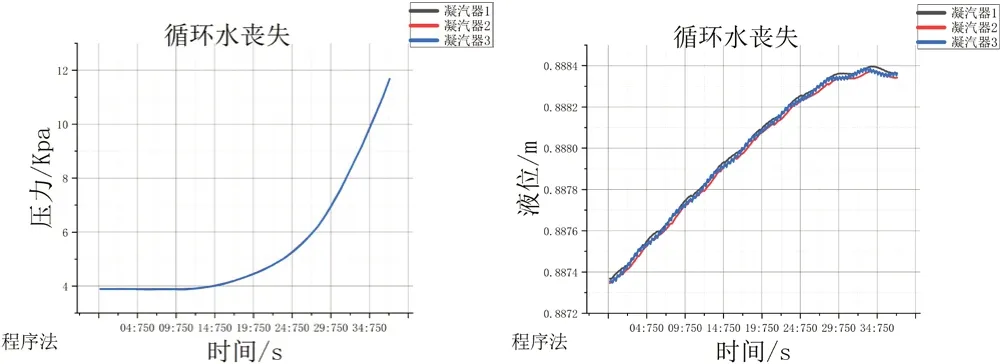
图5 所有循环水丧失工况下3 台凝汽器的压力和液位变化(程序法)
图6和图7为所有真空阀破坏工况下两种方法在3台凝汽器模拟中的比较;流网法模拟3台凝汽器平衡管线表现的压力和液位都不平衡,3号凝汽器变化有明显区别;程序法3台凝汽器的压力和液位一致变化。

图6 所有真空阀破坏工况下3 台凝汽器的压力和液位变化(流网法)

图7 所有真空阀破坏工况下3 台凝汽器的压力和液位变化(程序法)
2.2 模拟2台凝汽器参数比较
同样通过模拟电厂紧急停机、所有凝汽器丧失真空和所有凝汽器丧失循环水的特殊工况,监视是2台凝汽器的压力和液位。

图(8) 停机工况下2 台凝汽器的压力和液位变化(流网法)
图8和图9为停机工况下两种方法的比较;上下比较两种方法模拟2台凝汽器平衡管线,所表现的压力都有发散变化,但是程序法时间拉长最终收敛,流网法是持续发散不会平衡;流网法2台凝汽器液位直接发散变化,程序法则保持一致。

图9 停机工况下2 台凝汽器的压力和液位变化(程序法)
图10和图11为所有凝汽器丧失循环水工况下两种方法的比较;上下比较两种方法表现的压力变化一致;流网法2台凝汽器液位慢慢发散;程序法液位保持一致变化。

图10 所有循环水丧失工况下2 台凝汽器的压力和液位变化(流网法)

图11 所有循环水丧失工况下2 台凝汽器的压力和液位变化(程序法)
图12和图13为所有真空阀破坏工况下两种方法的比较;上下比较发现,流网法模拟2台凝汽器平衡管线表现的压力和液位都不平衡,且2台凝汽器压力和液位都程发散变化;程序法3台凝汽器的压力和液位一致变化。

图12 所有真空阀破坏工况下两个个凝汽器的压力和液位变化(流网法)
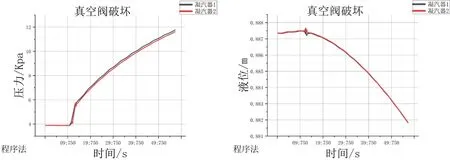
图13 所有真空阀破坏工况下两个个凝汽器的压力和液位变化(程序法)
2.3 结果分析
图2~13是监视凝汽器在三种大瞬态工况下的压力和液位变化;通过压力和液位变化判断各凝汽器之间的汽侧和水侧平衡是否稳定,确定程序法更能模拟出稳定的凝汽器模型。
流网模拟平衡管线时,为满足平衡管线平衡两边凝汽器汽、水间的工艺要求,需要把管线的导纳系数设置很大,假定管线流阻很小,来模拟实际电厂中的汽、水平衡管线;只要存在很小的压差,管线就会计算质量和能量,管线一直处于动态平衡状态;稳态时各凝汽器的压力和液位变化很小,动态平衡可以维持,但是瞬态工况下每个凝汽器由各接口的输入输出存在不一致,压力和液位变化较大,流网管线内的质量流量和压力变化幅度很大,流网计算就会存在不平衡,导致各凝汽器状态变化不一致;程序法的本质就是质量平衡,相当于将2台或3台凝汽器看成一个整体去内部计算,这样更能保证凝汽器之间的稳定。
模拟2台凝汽器的汽、水平衡瞬态变化时,相比于3台凝汽器的汽、水平衡比较容易引起不平衡;2台凝汽器的平衡管线更容易不平衡是因为不平衡是两两影响,这种影响只会让不平衡发散;而3台凝汽器平衡管线中,1个凝汽器是由2台凝汽器的计算偏执影响,相对而言震荡没有两两恶性循环明显。
各凝汽器压力和液位变化在两种模拟方法下表现趋势基本一致,且与电厂数据趋势相同,但程序法模拟的平衡管线让各凝汽器表现状态更加稳定一致。
3 结语
本文通过主流流网计算方法和质量能量平衡程序方法分别模拟2台和3台凝汽器部件汽、水平衡,相比较而言主流流网计算方法在计算极限压差和管线流导时会存在偏差,质量能量平衡程序的方法在各瞬态极限工况下能比较稳定地反映凝汽器各相状态,满足实际电厂对凝汽器工艺现象要求,从而实现模拟仿真的目标。
猜你喜欢
能源工程(2021年2期)2021-07-21
燃气轮机技术(2021年2期)2021-07-09
科技与创新(2021年3期)2021-02-27
石油化工自动化(2020年6期)2020-01-02
数码世界(2018年7期)2018-08-11
北方法学(2017年2期)2017-03-27
新教育时代·教师版(2017年1期)2017-03-24
现代法学(2016年6期)2016-12-08
汽车维护与修理(2015年2期)2015-02-28
武汉理工大学学报(社会科学版)(2014年6期)2015-01-15
