
液晶弹性体单摆在光刺激下的自持续振动研究
2022-03-29 02:13王伟
河南科技 2022年4期
王伟
摘 要:液晶弹性体(LCE)在光刺激下,由于其能够直接从环境中获取能量,无须额外人为控制即可维持自持续振动的优点,被广泛用于设计光驱动的多功能机械。本研究提出一种LCE单摆在光刺激下振动的动力学模型,通过LCE纤维的收缩和伸展来达到自持续振动的目的,对此进行力学分析和理论推导。通过数值计算后发现调节参数可以得到两种振荡模式,以此控制系统物理参数,来实现主动机械不同的功能用途,拓展了LCE自持续振动的设计应用。
关键词:液晶弹性体;光刺激;动力学模型;自持续振动
中图分类号:TQ334 文献标志码:A 文章编号:1003-5168(2022)4-0043-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.04.009
Study on Self-Sustained Vibration of Liquid Crystal Elastomer Pendulum Under Illumination Stimulation
WANG Wei
(Anhui University of architecture, Hefei 230601,China)
Abstract: Liquid Crystal Elastomers (LCE) are widely used in the design of light-driven multifunctional machines due to their advantages of obtaining energy directly from the environment and maintaining self-sustained vibration without additional artificial control. In this paper, a dynamic model of LCE pendulum vibration under the stimulation of light is presented. The self-sustained vibration is achieved through the contraction and extension of LCE fiber, after the numerical calculation, it is found that two oscillation modes can be obtained by adjusting the parameters, which can control the physical parameters of the system to realize the different functions of the active machinery and enrich the design application of Lce self-sustained vibration.
Keywords: liquid crystal elastomer; photostimulation; kinetic model; self-sustained vibration
0 引言
自持續运动是物体在受到非周期性激励时,能够持续、周期性运动的现象,并在很多被动和主动变形材料中得以实现[1-2]。自持续运动具有很多独特的优点,例如,在不增加其他手动控制部件的情况下,直接从环境中收集能量来驱动机械实现周期性运动,而这可以大大降低系统的整体复杂性并实现系统的便携性[3]。
系统在自持续运动过程中,由于系统阻尼引起的能量耗散,需要获取外部能量予以补偿。近年来,提出很多外部刺激响应材料和结构组成的内反馈机制来实现能量补偿。液晶弹性体(Liquid Crystal Elastomer,LCE)作为一种重要的光响应材料,兼备了橡胶弹性体的弹性特性和液晶各向异性,广泛应用于软机器人等相关领域。它能够在恒定光照下收缩变形,并在无光下恢复原状,通过变形和运动过程的耦合机制来实现系统的自持续运动[4-5]。
当前,虽然已经有很多的自持续振动模式被提出,但仍然有必要提出新的自持续振动模式,来不断丰富自持续运动的应用。鉴于此,本研究提出一种由LCE纤维构成的单摆自持续振动模型,并对运动过程进行力学分析。
1 基本公式和解决方法
1.1 理论模型和公式
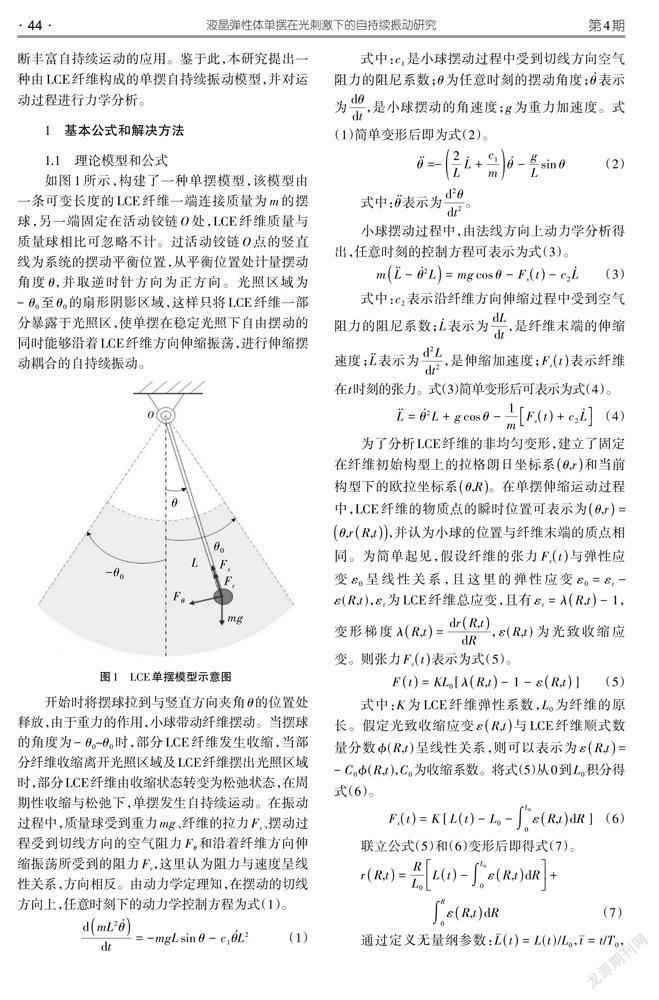
如图1所示,构建了一种单摆模型,该模型由一条可变长度的LCE纤维一端连接质量为m的摆球,另一端固定在活动铰链O处,LCE纤维质量与质量球相比可忽略不计。过活动铰链O点的竖直线为系统的摆动平衡位置,从平衡位置处计量摆动角度θ,并取逆时针方向为正方向。光照区域为−θ至θ的扇形阴影区域,这样只将LCE纤维一部分暴露于光照区,使单摆在稳定光照下自由摆动的同时能够沿着LCE纤维方向伸缩振荡,进行伸缩摆动耦合的自持续振动。
开始时将摆球拉到与竖直方向夹角θ的位置处释放,由于重力的作用,小球带动纤维摆动。当摆球的角度为−θ0~θ0时,部分LCE纤维发生收缩,当部分纤维收缩离开光照区域及LCE纤维摆出光照区域时,部分LCE纤维由收缩状态转变为松弛状态,在周期性收缩与松弛下,单摆发生自持续运动。在振动过程中,质量球受到重力mg、纤维的拉力F、摆动过程受到切线方向的空气阻力F和沿着纤维方向伸缩振荡所受到的阻力F,这里认为阻力与速度呈线性关系,方向相反。由动力学定理知,在摆动的切线方向上,任意时刻下的动力学控制方程为式(1)。
式中:c是小球摆动过程中受到切线方向空气阻力的阻尼系数;θ为任意时刻的摆动角度;θ表示为dθ/dt,是小球摆动的角速度;g为重力加速度。式(1)简单变形后即为式(2)。
小球摆动过程中,由法线方向上动力学分析得出,任意时刻的控制方程可表示为式(3)。
式(8)和式(13)为二阶变系数常微分方程组,不能直接得到解析解,可运用经典四阶龙格-库塔法,将二阶微分方程转化为一阶微分方程组进行求解,再运用Matlab软件迭代计算公式(8)和(11),能够得到单摆的最终稳态响应,即摆动角度和伸缩振动位移与时间的关系,以及两者耦合作用下的运动状态。
2 两种主要自持续运动模式
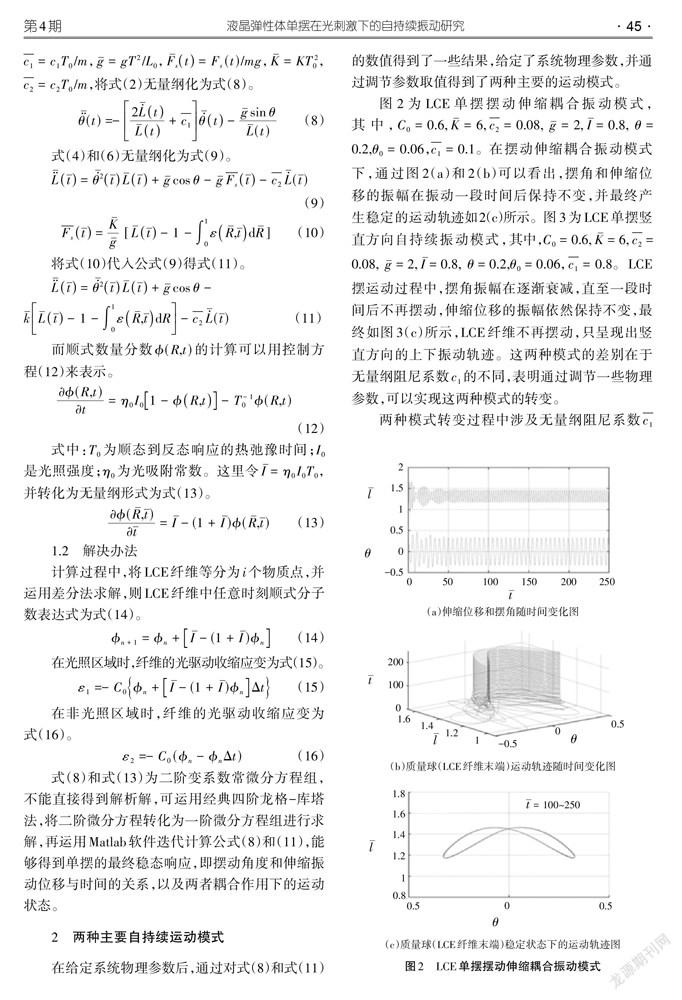
在给定系统物理参数后,通过对式(8)和式(11)的数值得到了一些结果,给定了系统物理参数,并通过调节参数取值得到了两种主要的运动模式。
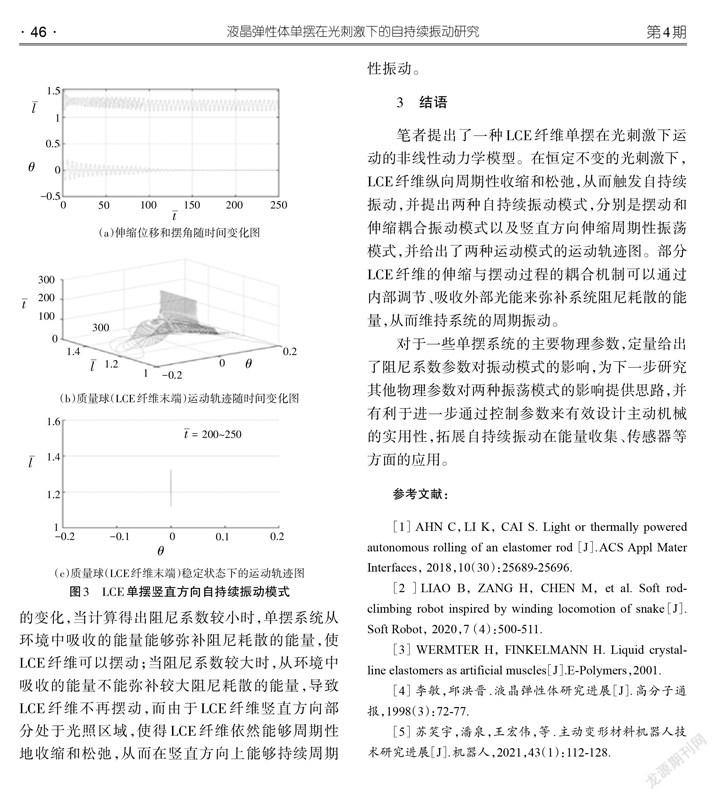
两种模式转变过程中涉及无量纲阻尼系数[c1]的变化,当计算得出阻尼系数较小时,单摆系统从环境中吸收的能量能够弥补阻尼耗散的能量,使LCE纤维可以摆动;当阻尼系数较大时,从环境中吸收的能量不能弥补较大阻尼耗散的能量,导致LCE纤维不再摆动,而由于LCE纤维竖直方向部分处于光照区域,使得LCE纤维依然能够周期性地收缩和松弛,从而在竖直方向上能够持续周期性振动。
3 结语
笔者提出了一种LCE纤维单摆在光刺激下运动的非线性动力学模型。在恒定不变的光刺激下,LCE纤维纵向周期性收缩和松弛,从而触发自持续振动,并提出两种自持续振动模式,分别是摆动和伸缩耦合振动模式以及豎直方向伸缩周期性振荡模式,并给出了两种运动模式的运动轨迹图。部分LCE纤维的伸缩与摆动过程的耦合机制可以通过内部调节、吸收外部光能来弥补系统阻尼耗散的能量,从而维持系统的周期振动。
对于一些单摆系统的主要物理参数,定量给出了阻尼系数参数对振动模式的影响,为下一步研究其他物理参数对两种振荡模式的影响提供思路,并有利于进一步通过控制参数来有效设计主动机械的实用性,拓展自持续振动在能量收集、传感器等方面的应用。
参考文献:
[1] AHN C,LI K, CAI S. Light or thermally powered autonomous rolling of an elastomer rod [J].ACS Appl Mater Interfaces, 2018,10(30):25689-25696.
[2 ]LIAO B, ZANG H, CHEN M, et al. Soft rod-climbing robot inspired by winding locomotion of snake[J]. Soft Robot, 2020,7 (4):500-511.
[3] WERMTER H, FINKELMANN H. Liquid crystalline elastomers as artificial muscles[J].E-Polymers,2001.
[4] 李敏,邱洪晋.液晶弹性体研究进展[J].高分子通报,1998(3):72-77.
