融合MOG2算法与FT算法的移动目标检测方法
2022-03-29 23:07刘泽平刘明兴李晓帆姚明杰麻方达符朝兴
青岛大学学报(工程技术版) 2022年2期
刘泽平 刘明兴 李晓帆 姚明杰 麻方达 符朝兴










文章编号:10069798(2022)02006106;DOI:10.13306/j.10069798.2022.02.010
摘要:针对移动目标检测方法存在的受背景环境影响而导致检测结果不准确的问题,本文提出一种融合高斯混合模型的背景减除法。算法与频率调谐显著性区域检测(frequency-tuned,FT)算法的移动目标检测方法。该研究以摄像头拍摄到的遥控车行走视频为分析材料,在降采样图像上用MOG2算法检测移动目标,经二值化和滤波去噪后框选移动目标感兴趣区域,采用FT算法检测此感兴趣区域,并利用置信度结合两次检测结果完成移动目标检测。实验结果显示,在置信度分别为α=0.6,β=0.4时,本文检测方法将检测300帧图像时平均交并比由0.72提高到0.78,说明该算法可以消除背景阴影及鬼影影响,从而有效提高移动目标的检测精度。
关键词:移动目标检测;MOG2算法;FT算法;高斯混合模型;背景减除法
中图分类号:TP391.41文献标识码:A
随着计算机视觉技术的不断发展,移动目标检测越来越广泛的应用于智能交通、智能安防、无人驾驶、航空航天和医学等领域,使移动目标检测技术成为研究的热点\[1\]。目前,广泛运用的移动目标检测方法是基于高斯混合模型的背景减除法(backgroundsubtractormixtureofgaussians,MOG2)。1999年,C.STAUFFER等人\[2\]采用多个高斯分布拟合背景,首先运用高斯混合模型对背景进行建模,该方法可以在复杂场景下检测出运动物体;2012年,O.BARNICH等人\[3\]提出VIBE算法,对单帧图像进行建模,后续帧开始通过欧氏距离将像素点分为前景和背景,并采用无记忆更新和重采样更新,该算法虽然计算速度快,但仍会出现鬼影现象;戚海永\[4\]提出了一种基于累积差分更新的背景减除法,较好地消除了场景变化及噪声影响等的干扰,有效地检测出运动物体;梁硕\[5\]把LaBGen方法生成的背景图像作为背景模型初始化的输入帧,改进出一种基于LaBGen的自适应阂值ViBe算法;宁志雄\[6\]基于高斯混合模型,对泊车缓冲区中的动态物体进行了有效检测;黎阳羊\[7\]采用基于高斯混合模型的背景减除法,利用当前圖像与背景图像的差分来检测出运动区域;为提高运动目标轮廓边缘的精确度,殷梦妮\[8\]在进行运动目标检测时,结合高斯混合模型的背景减除法和最小核值相似区(smallestunivaluesegmentassimilatingnucleus,SUSAN)边缘检测算子。以上研究虽在某些方面改善了目标检测方法,但并未充分考虑移动物体阴影的影响。有阴影影响情况下,检测结果会出现明显的不准确现象。因此,本文主要对融合MOG2算法与FT算法的移动目标检测方法进行研究,充分考虑阴影的影响,提出一种鲁棒性较高的移动目标检测方法,即检测移动目标时,首先采用MOG2方法检测出存在移动目标的感兴趣区域,然后结合FT算法,得到更为准确的移动目标区域。研究结果表明,本研究改进后的算法,其检测精度明显高于原算法,有效的解决了背景减除法检测移动目标时存在的问题。该研究具有一定的创新性以及学术性。-
1基本原理
1.1MOG2算法
MOG2是OpenCV中开源的一种背景提取算法,通过对比当前帧和生成的背景模型,区分出视频序列中变化较大的运动物体,其中背景模型随场景变化实时更新\[9\]。MOG2采用的高斯混合模型(gaussianmixturemodel,GMM)是背景建模中的经典算法\[10\],它通过多个高斯概率分布函数线性组合,表示像素在时域概率分布模型。像素在时域概率分布模型为
式中,xti,j代表i,j位置的像素点x在t时刻的像素值;ωtk为t时刻第k个高斯分布的加权系数\[11\];∑Nk=1ωtk=1;Gxti,j,μtk,(σtk)2表示t时刻期望值为μtk,(σtk)2为标准差,即
将每个像素点x与此刻的背景模型进行比较,当像素点与第k个高斯模型匹配时,像素为背景,否则为移动目标,并用一个新的分布替换模型中的权重最小分布。其比较公式为
权重更新公式为
式中,α为更新因子;Dtk为匹配结果标识符,当匹配成功时为1,否则为0。匹配成功后,模型更新为
1.2FT算法
FT算法是R.ACHANTA等人\[12\]在2009年提出的全频域分析算法,它将图像傅里叶变换,并将时域图像转换到频域,在频域的图像,可分为代表图像整体信息的低频部分和反映图像细节信息的高频部分\[13\]。显著性区域检测主要使用低频部分信息,因此FT方法采用高斯平滑来去除图像高频。
将图像由颜色空间RGB转换为颜色空间LAB,计算整幅图像L、A、B的平均值,并计算每一个像素点与平均值间的欧式距离,得到显著图像\[14\]。像素的显著性为
式中,Iμ为图像在LAB空间像素算术平均值;Iωhc(p)为图像高斯模糊模板,用来消除纹理细节和噪声;‖‖为欧氏距离\[15\]。
将显著图像通过每一点显著值除以最大显著值,归一化后,将PAX作为每个点对应的数值,PAX是像素为区域内前景的概率,即
2实验过程
2.1环境搭建
本文实验所使用的摄像头为海康威视DSIPCT12I,焦距为4mm,分辨率为1920d/i×1080d/i,将摄像头悬挂在天花板上方,对地面倾斜照射,摄像头悬挂高度为5m,采集的模拟环境大小为4m×6m。摄像头拍摄的模拟实验场景如图1所示,本研究将位于图中间的遥控车作为移动目标来检测。
基于本文方法检测移动目标,不同的硬件和软件环境效果有所不同,本文仿真所用系统为Ubuntu18.04LTD,图形处理器(graphicsprocessingunit,GPU)为NVIDIA1070Ti,随机存取存储器(randomaccessmemory,RAM)为16GB,运行程序的环境为Python3.7+OpenCV3.4.2。
2.2实验步骤
实验流程图如图2所示。本文对采集的图像降采样处理,然后应用MOG2算法进行移动目标检测,对检测结果图像进行去噪处理,得到MOG2移动目标检测的结果和去噪后的结果一,在结果一基础上框选移动目标区域,利用置信度结合MOG2算法与FT算法得出实验结果二。
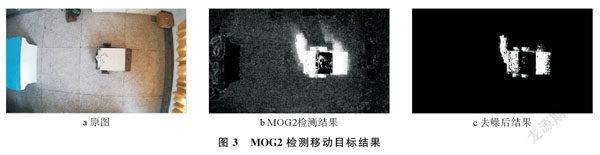
本文采用监控摄像头捕捉图像,摄像头位置固定不变,属于静态背景,车间内主要影响运动目标识别的因素有光照、阴影及杂乱背景。对采集的图像运用MOG2进行移动目标检测,然后进行去噪处理,MOG2检测移动目标结果如图3所示。
由图3可以看出,基于混合高斯模型检测移动目标时,受光照影响较大,易将阴影区域检测为移动目标,并且会出现鬼影现象,因此对移动目标区域再次检测,通过计算像素点为移动目标的概率重新检测。
移动目标检测的主要目标是前景目标,对于背景环境的变化不太关注。本文将除了要检测的目标外都划为背景,因此识别结果的像素点状态可分为移动的前景和背景两类,每个像素点为移动前景的概率为P,PA为前景的概率,PB为移动的概率,当一个像素点为背景像素时,其大概率是不移动,移动事件与背景事件是相关事件;当像素为背景时,移动的概率无法计算。因此,概率P為
式中,PAX表示通过像素为区域内前景的概率;PBX表示通过区域内像素移动的概率;α和β分别为PAX和PBX的置信度,α+β=1\[16\]。PAX和PBX为存在移动目标区域内像素为移动目标概率的测量值,都具有一定误差。
为提高运算速度,本文将MOG2算法检测出的移动目标区域框选出来,既能减少不必要区域的计算,又能选择出存在移动目标区域,存在移动目标区域如图4所示。
假设此时选择出的存在移动目标区域已足够小,且该区域内前景目标大部分是移动的,因此采用图像显著图表示概率PAX\[17\],应用显著性检测方法FT算法,得到区域显著图如图5所示。由图5可以看出,图中遥控车部分能区别于不感兴趣的背景,并且遥控车的轮廓较为清晰。
将移动目标区域内MOG2算法的检测结果进行高斯模糊后,看作将该结果每一像素点值作为存在移动目标区域内移动的概率,区域移动目标检测结果如图6所示。由图6可以看出,此时遥控车和背景阴影都被认为成移动目标,并且遥控车边界不清晰。此时,像素点范围为0~255,对其归一化\[18\],将归一化后结果作为PBX。
图4存在移动目标区域图5区域显著图图6区域移动目标检测结果-对于置信度α和β,不同置信度效果对比如图7所示。由图7可以看出,对结果进行二值化操作,当概率P大于0.5时,像素置为白色,否则为黑色。在本文采集的视频上,α=0.6,β=0.4时的效果好于其他权重效果。为提高检测速度及效果,本文引入了图像金字塔模型,所有目标检测均在下采样图像上进行。图7不同置信度效果对比
3实验结果
3.1目标检测结果
将本文算法在置信度α=0.6,β=0.4时,与基于高斯混合模型的背景减除法进行对比,背景减除法效果对比如图8所示。由图8可以看出,改进后的算法可消除背景阴影及鬼影影响\[19\],基于高斯混合模型方式的检测速度为17.38f/s,本改进方法的检测速度为13.65f/s,由于本改进方法需要对存在移动目标区域内的检测结果进行重新运算,因此检测速度低于原方法。
3.2目标检测精度
本文采用交并比(intersectionoverunion,IOU),评价移动目标检测精度。IOU为检测框与原图片中标记框的重合程度\[20\],其计算方法是检测结果与实际结果的交集与并集之比,即
其中,D表示检测结果;T表示实际结果。
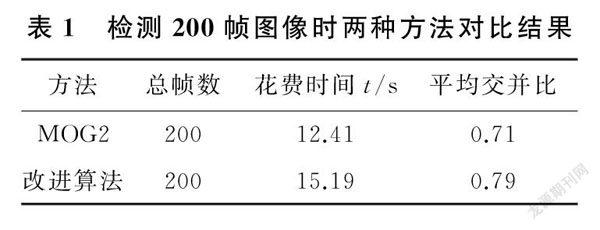
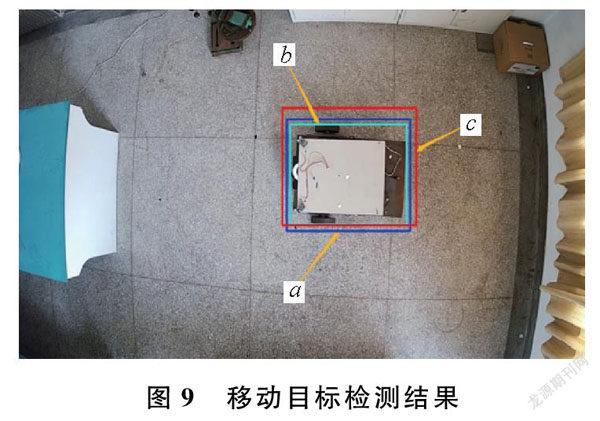
在同一段视频上,分别采用MOG2和本文改进算法进行实验,检测200帧图像时的两种方法对比结果如表1所示,检测300帧图像时的两种方法对比结果如表2所示,并对表1和表2中两种算法检测移动目标时的花费时间和平均交并比进行统计。-移动目标检测结果如图9所示。图中,a表示真实框;c表示MOG2算法检测框;b表示本文改进算法的检测框。在背景光照干扰下,本文改进后的算法检测精度明显好于原算法,但检测速度与原算法相比略慢。
4结束语
本文提出了一种改进的移动目标检测方法,该方法利用置信度结合MOG2算法与FT算法完成移动目标检测。应用本文方法可将300帧图像移动目标检测的平均交并比由0.72提高到0.78,提高了移动目标检测精度,改进了原方法中容易出现的噪声、鬼影等现象,有效解决了光影变化导致检测区域过大问题,对应用移动目标检测方法较多的智能交通、无人驾驶等领域有一定的帮助。本方法需要对框选目标区域内的检测结果进行重新运算,所以检测速度略慢于原算法,另外本文提出改进方法的置信度参数需要手动设定,如何计算自适应的置信度是下一步研究的重点。
参考文献:
\[1\]王迪聪,白晨帅,邬开俊.基于深度学习的视频目标检测综述\[J\].计算机科学与探索,2021,15(9):15631577.
\[2\]STAUFFERC,GRIMSONWEL.Adaptivebackgroundmixturemodelsforreal-timetracking\[C\]∥1999IEEEComputerSocietyConferenceonComputerVisionandPatternRecognition.FortCollins:IEEE,1999:246252.
\[3\]BARNICHO,VANDROOGENBROECKM.ViBe:Auniversalbackgroundsubtractionalgorithmforvideosequences\[J\].IEEETransactionsonImageProcessing,2011,20(6):17091724.
\[4\]戚海永.基于累积差分更新背景减除法的运动目标检测算法研究\[J\].办公自动化,2020,25(15):4244,60.
\[5\]梁硕.基于背景减除法的运动目标检测与跟踪算法研究\[D\].西安:西安石油大学,2019.
\[6\]宁志雄.泊车AGV的车辆位姿检测系统设计\[D\].哈尔滨:哈尔滨工业大学,2019.
\[7\]黎阳羊.基于背景减除法的高斯混合模型在电缆沟预防动物的应用\[J\].信息技术与信息化,2020(1):5557.
\[8\]殷梦妮.基于高斯混合模型的运动目标检测\[D\].哈尔滨:哈尔滨工程大学,2012.
\[9\]SAKPALNS,SABNISM.Adaptivebackgroundsubtractioninimages\[C\]∥2018InternationalConferenceonAdvancesinCommunicationandComputingTechnology(ICACCT).Sangamner:IEEE,2018:439444.
\[10\]ZIVKOVICZ.ImprovedadaptiveGaussianmixturemodelforbackgroundsubtraction\[C\]∥Proceedingsofthe17thInternationalConferenceonPatternRecognition.Cambridge:IEEE,2004:2831.
\[11\]朱松.MOG2算法在區域入侵检测的应用\[J\].科技风,2019(5):248.
\[12\]ACHANTAR,HEMAMIS,ESTRADAF,etal.Frequency-tunedsalientregiondetection\[C\]∥2009IEEEConferenceonComputerVisionandPatternRecognition.Miami:IEEE,2009:15971604.
\[13\]李富生.视觉显著性检测及其在视频编码中的应用研究\[D\].深圳:深圳大学,2015.
\[14\]黄梨.基于改进的FT算法在自然图像中的应用研究\[J\].微型机与应用,2015,34(21):3739.
\[15\]范明亮,郭子涵,柴晓楠,等.面向FT-M7002的Sobel边缘检测算法优化实现\[J/OL\].计算机工程,2021:18\[20210729\].https:∥doi.org/10.19678/j.issn.10003428.0061903.
\[16\]成科扬,孙爽,王文杉,等.结合置信度加权融合与视觉注意机制的前景检测\[J\].中国图象图形学报,2021,26(10):24622472.
\[17\]夏卫生,方向瑶,杨帅,等.基于频率调谐的焊缝红外图像显著性检测算法\[J\].焊接,2021(4):812.
\[18\]吴煌,李凯勇.基于DCT域的数字图像隐写容量归一化方法\[J\].计算机仿真,2021,38(8):207211.
\[19\]安世全,张莉,瞿中.基于导向滤波的鬼影消除多曝光图像融合\[J\].计算机工程与设计,2020,41(11):31543160.
\[20\]孙世强,左海维,赵露婷.联合特征相似性度量和交并比的检测框优选研究\[J\].电脑知识与技术,2019,15(29):190193.作者与作者单位英译
1)作者:中国人名按汉语拼音拼写;其他非英语国家人名按作者自己提供的罗马字母拼法拼写。
2)单位:单位名称要写全(由小到大),并附地址和邮政编码,确保联系方便。另外,英译单位不能采取缩写,且一定要采用本单位统一的译法,切不可随意改写。
AMovingTargetDetectionMethodCombiningMOG2AlgorithmandFTAlgorithm
LIUZeping,LIUMingxing,LIXiaofan,YAOMingjie,MAFangda,FUChaoxing
(CollegeofMechanicalandElectricalEngineering,QingdaoUniversity,Qingdao266071,China)Abstract:
Themovingtargetdetectionmethodisaffectedbythebackgroundenvironment,resultingininaccuratedetectionresults.AmovingtargetdetectionmethodcombiningMOG2algorithmandfrequencytunedsignificantregiondetection(FT)algorithmisproposed.Takingtheremotecontrolvehiclewalkingvideocapturedbythecameraastheanalysismaterial,themovingtargetisdetectedbyMOG2algorithmonthedownsampledimage.Afterbinarizationandfilteringdenoising,theregionofinterestofthemovingtargetisframed,theregionofinterestisdetectedbyFTalgorithm,andthemovingtargetdetectioniscompletedbyusingconfidencecombinedwiththetwodetectionresults.Whentheconfidenceisα=0.6,β=0.4,theaverageintersectiontounionratioof300framesisincreasedfrom0.72to0.78,whichshowsthatthealgorithmcaneliminatetheinfluenceofbackgroundshadowandghost,soastoeffectivelyimprovethedetectionaccuracyofmovingtargets.
Keywords:
movingtargetdetection;MOG2algorithm;FTalgorithm;Gaussianmixturemodel;backgroundsubstraction
收稿日期:20211020;修回日期:20211212
作者简介:刘泽平(1996),男,硕士研究生,主要研究方向为人工智能。
通信作者:符朝兴(1968),男,博士,副教授,主要研究方向为人工智能和机械振动。Email:cx_f@163.com
-