
基于线性二次型的小型船站天线摇摆隔离分析设计
2022-03-31 09:38彭世林刘来顺
河北省科学院学报 2022年1期
彭世林,刘来顺
(1.安徽省无为第一中学,安徽 无为 238300;2.安徽省无为第四中学,安徽 无为 238300)
引言
天线根据安装环境可以分为静中通天线和动中通天线。静中通天线就是天线安装在一个固定的位置,位置是不变得,比如说地面站天线,车停才使用的车载天线等。动中通天线,就是天线在使用过程中,所安装的环境是实时变化移动的,比如说船载天线,车载动中通天线,机载天线等,相比静中通天线,动中通天线对隔离载体运动给天线跟踪环路带来得影响要求更高。本文根据线性二次型[1]对小型船站天线的隔离度进行分析。
1 天线指向目标的最大角速度及最大角加速度分析
船载使用情况下,天线在跟踪动态目标的同时需要隔离船体的摇摆,所以天线的运动参数首先根据船摇条件及目标动态分别进行分析,然后进行综合。
1.1 船载条件分析
本文以2.3m抛物面小型船站天线为例,使用其中比较严酷的条件进行分析,即橫摇±1.8°,周期5s;纵摇±2.9°,周期5s,最高仰角取75°。
(1)姿态最大角速度:
横倾最大角速度(ΩR)max = 1.8×2π/5 =2.26(°)/s
纵倾最大角速度(ΩP)max =2.9×2π/5 =3.64(°)/s
(2)姿态最大角加速度:
横倾最大角加速度(αR)max = 1.8×(2π/5)2=2.84(°)/s2
纵倾最大角加速度(αP)max=2.9×(2π/5)2= 4.57(°)/s2
(3)姿态在天线A、E轴的投影:
投影到E轴的最大角速度(ΩE)max=4.3(°)/s
投影到A轴的最大角速度(ΩA)max=(ΩE)maxtgE=16.0(°)/s
投影到E轴的最大角加速度(αE)max=5.4(°)/s2
投影到A轴的最大角加速度(αA)max=(αE)maxtgE=20.2(°)/s2
1.2 船摇条件分析
船摇摆条件:橫摇幅度y=Asin(φt)
(1)姿态最大角速度:
横倾最大角速度(ΩR)max = 7.5×2π/8 =5.9(°)/s
纵倾最大角速度(ΩP)max =3×2π/5.5 =3.4(°)/s
(2)姿态最大角加速度:
横倾最大角加速度(αR)max = 7.5×(2π/8)2=4.62(°)/s2
纵倾最大角加速度(αP)max = 3×(2π/5.5)2= 3.91(°)/s2
(3)姿态在天线A、E轴的投影:
投影到E轴的最大角速度(ΩE)max=6.81(°)/s
投影到A轴的最大角速度(ΩA)max=(ΩE)maxtgE=25.4(°)/s
投影到E轴的最大角加速度(αE)max=6.05(°)/s2
投影到A轴的最大角加速度(αA)max=(αE)maxtgE=22.6(°)/s2
1.3 目标动态分析的正割补偿
目标动态条件:最大速度6.8km/s,最近距离50km,最高仰角75°。假定目标系水平常速飞行,如图1所示。
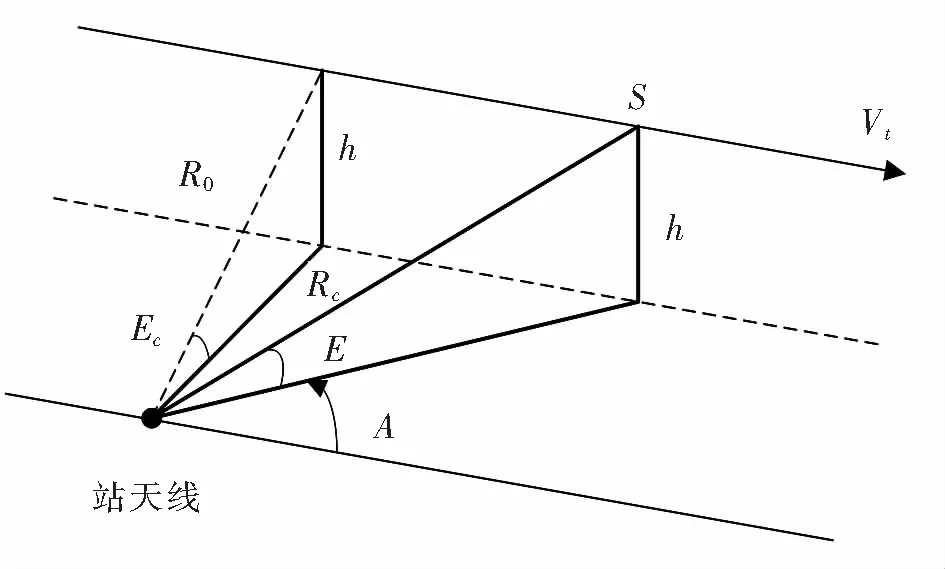
图1 AE坐架天线正割补偿示意图
图1中Rc为测站天线距目标飞行地面轨迹的最近距离;Ec为最近距离时的仰角;R0为斜距;Vt为目标速度。
代入计算:
方位最大速度ωAmax=0.525(rad/s)=30.1(°)/s
1.4 天线最大速度及最大加速度
由于船体摇摆与目标动态可能同时发生,对天线轴最大速度及最大加速度进行求和处理。
E轴最大速度:6.81+8.1=14.91(°)/s;
A轴最大加速度:22.6+10.3=32.9(°)/s2;
E轴最大加速度:6.05+4.2=10.25(°)/s2。
2 船摇隔离度分析
船载天线控制环路由双闭环结构组成,内环为陀螺环,外环为跟踪环。其中内环采用现代控制理论中的LQR控制器[3],外环采用标准二型系统。船载天线标准控制框图如图2所示。
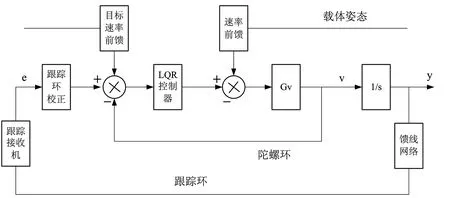
图2 前馈补偿的双闭环控制图
船摇的隔离度通过陀螺环反馈环及速率前馈实现,图2中,Gv为此船载天线的陀螺环控制对象的数学模型,其模型输出v为角速度信号,根据以往船载天线的设计调试经验,以谐振频率7Hz建立天线陀螺环控制对象数学模型,经结构仿真,2.3m抛物面天线结构谐振频率横向7.3Hz,纵向9.54Hz,为方便设计,船体安装基础的结构谐振频率为7Hz,后续伺服环路设计均以7Hz作为输入参考。得到陀螺环模型波特图如图3所示。

图3 陀螺环波特图
LQR(linear quadratic regulator)即线性二次型调节器,其控制率为简单的状态线性反馈,基于状态空间模型设计状态反馈参数,以状态变量与控制变量的二次型函数作为设计指标,并通过求解对应Racatti方程求得最优解。标准LQR控制结构图如图4所示。
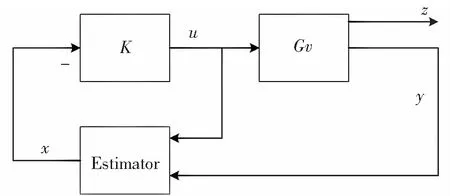
图4 线性二次型框图

3 仿真分析
经过matlab仿真验证,仿真结果如图5所示。
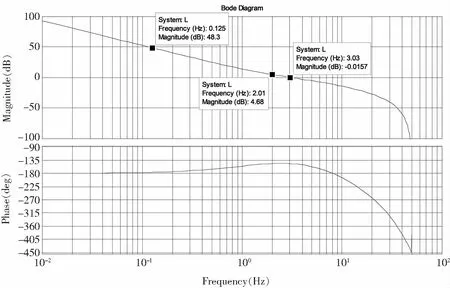
图5 开环幅频曲线仿真图
由图5可知,天线陀螺环的剪切频率ωc,在0.125Hz处的隔离度为48.3dB。这样船载使用情况下,在周期8s时,天线满足指标要求。
3 小结
本文针对小型船站天线,利用线性二次型模型,对船载天线的隔离度进行了频域分析,并给出了MATLAB仿真,仿真结果显示,系统设计能够满足跟踪精度的要求。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
电子技术与软件工程(2019年5期)2019-06-20
弹箭与制导学报(2019年6期)2019-06-08
环球时报(2018-12-28)2018-12-28
动漫星空(兴趣百科)(2018年9期)2018-10-25
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
百科探秘·航空航天(2017年3期)2017-07-12
百科探秘·航空航天(2017年4期)2017-07-10
北京理工大学学报(2016年12期)2016-02-22
