
基于单极性PWM的开关磁阻电机转矩控制策略*
2022-04-02 05:37房维芊张新华张兆凯
飞控与探测 2022年1期
房维芊,张新华,张兆凯
(北京自动化控制设备研究所·北京·100074)
0 引 言
开关磁阻电机(Switched Reluctance Motor,SRM)作为一种结构简单、可靠性好、性价比高的新型伺服电机,近年来已成为电气传动领域的研究热点。SRM的定、转子为双凸极结构,其转子无永磁体与绕组,可适用于高速运行及高温环境;此外,SRM各相均为独立驱动工作,其驱动系统具有较高的容错能力,这些优势使得SRM在航空工业领域拥有较为广泛的实际应用场景。
然而与传统伺服电机相比,SRM有一个明显的缺点,即因电机结构及脉冲工作方式所引起的大转矩脉动。为有效抑制转矩脉动,通过优化控制策略以提高系统转矩控制能力是目前各国学者的重点研究方向。文献[3]介绍了基于转矩分配函数(Torque Sharing Function,TSF)的直接转矩控制策略,通过转矩分配函数确定期望转矩,从而实现各相转矩平滑过渡。该策略在低速运行时可获得良好的控制性能,但高速时因相电流变化迟缓,无法按转矩脉动最小分布,导致其转矩抑制能力受限。文献[4]介绍了基于模糊控制的直接转矩控制策略,该策略虽适用于SRM此类非线性系统,但因模糊设计本身缺乏系统性且模糊控制精度与运算强度的强相关特性,导致其并不适用于高精度伺服控制。
本文从高精度高速伺服电机控制角度出发,对SRM转矩脉动抑制开展研究。以滞环型直接瞬时转矩控制(Direct Instantaneous Torque Con-trol,DITC)策略为基础,结合脉冲宽度调制(Pulse Width Modulation,PWM)特性,提出了单极性PWM-DITC控制策略。通过对单极性PWM-DITC控制策略的仿真设计与实验,验证了本文提出的控制策略可有效抑制SRM转矩脉动。
1 开关磁阻电机的滞环DITC策略
开关磁阻电机DITC策略以转矩作为被控对象,将瞬时转矩信息通过计算直接转换为逻辑控制信号,使实际瞬时转矩有效地跟踪参考转矩,进而达到抑制转矩脉动的效果。
在DITC类型中,采用滞环控制是一种较为常见的方法。滞环DITC系统为内转矩环、外速度环的双闭环结构,主要由SRM本体、功率变换器、转矩滞环控制器等组成,转矩滞环控制器是其核心所在,系统结构框图如图1所示。
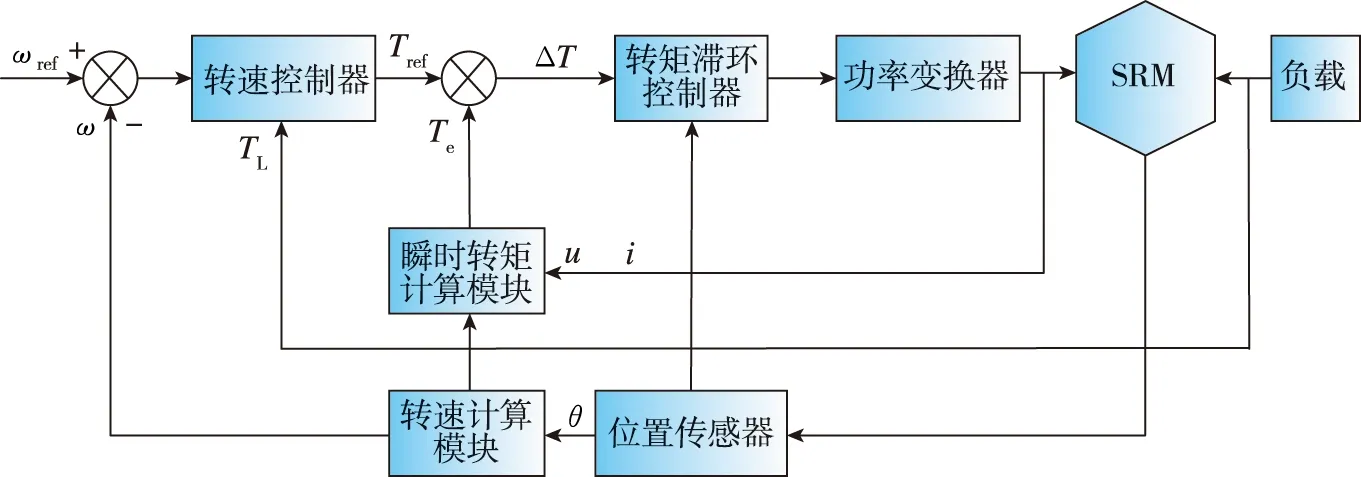
图1 滞环DITC系统框图Fig.1 Block diagram of hysteresis DITC system
图1中,、、分别为给定转速、实际转速及负载转矩;、、分别为相电压、相电流及各相位置角度。转矩滞环控制器通过计算出的瞬时转矩与参考转矩的偏差值Δ,得到转矩输出信号,并根据各相绕组采集到的位置信息,判断当前各相所处导通区域,得到位置输出信号,最后将转矩输出信号与位置输出信号相乘,对功率变换器中的开关管输出PWM逻辑控制信号,进而实现对电机的运行控制。
1.1 功率变换器的开关状态
SRM驱动控制采用以绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)为主开关器件的三相不对称半桥电路,对应的功率电路状态如图2所示,其中VT1、VT2为IGBT;VD1、VD2为续流二极管;开关状态分别为励磁状态、零电压续流状态和反向退磁状态,分别用=1、=0 、=-1表示。
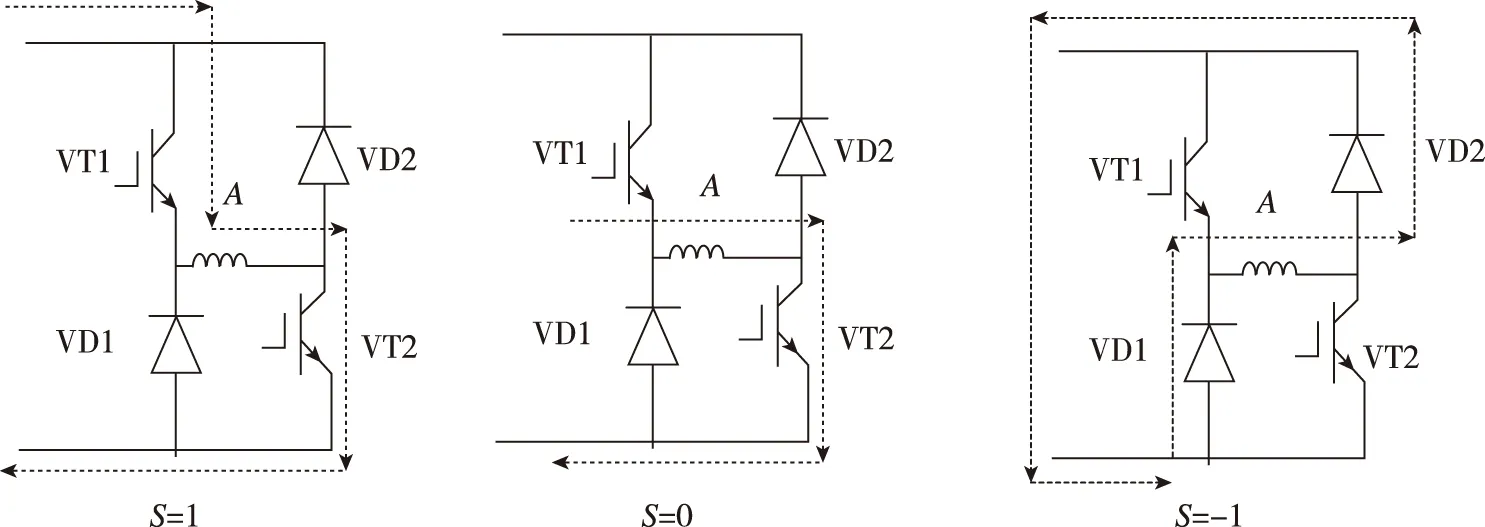
图2 功率变换器的三种开关状态Fig.2 Three switching states of power converter
1.2 转矩滞环区间的设计
根据当前相所处位置不同,即单相导通区与换相导通区两种情况,对转矩滞环控制器内部的滞环区间分别设计相应的控制方案,滞环设计如图3~图5所示。
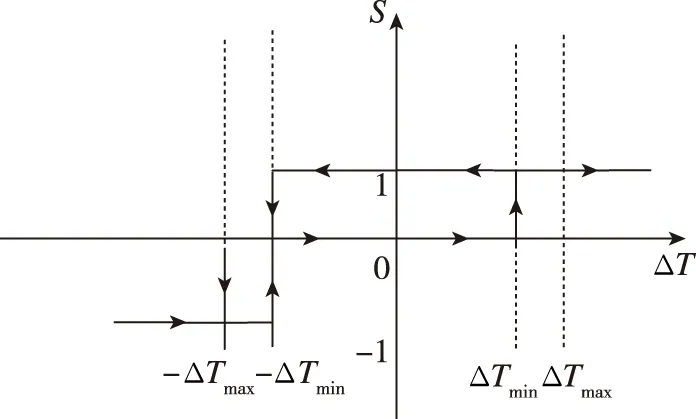
图3 单相导通区Fig.3 Single phase conduction zone

图4 换相导通区-即将导通相Fig.4 Commutation conduction zone-phase to be switch on
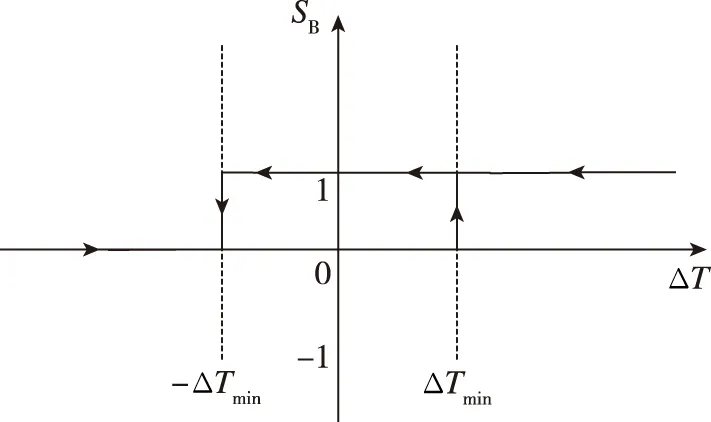
图5 换相导通区-即将关断相Fig.5 Commutation conduction zone-phase to be shut off
(1)单相导通区
单相导通区只有当前一相绕组被激励,在忽略绕组间互感的前提下,该相绕组产生的瞬时转矩即为最终输出的瞬时转矩。设定该相绕组的两种控制状态分别为=1开通状态与=0续流状态,详细设计如下:
当转矩偏差Δ递增时:若Δ>Δ,则将开关置于=1开通状态,当前相绕组励磁,瞬时转矩快速增大;若-Δ<Δ<Δ,则将开关置于=0续流状态,当前相绕组压降为0,瞬时转矩缓慢减小;若Δ<-Δ,则将开关置于=-1关断状态,当前相绕组为承受负压,瞬时转矩快速减小。
当转矩偏差Δ递减时:若Δ>-Δ,则将开关置于=1开通状态,当前相绕组励磁,瞬时转矩快速增大;若-Δ≤Δ≤Δ,则将开关置于=0续流状态,当前相绕组压降为0,瞬时转矩缓慢减小;若Δ<-Δ,则将开关置于=-1关断状态,当前相绕组为承受负压,瞬时转矩快速减小。
(2)换相导通区
换相导通区为即将导通相与即将关断相共同励磁的区域,其最终输出的瞬时转矩为两相共同作用的合成瞬时转矩。相较于单相导通区的单滞环设计,换相导通区需对即将导通相与即将关断相分别设置不同的滞环控制。即将导通相有三种控制状态,分别为=1开通状态、=0续流状态与=-1关断状态;即将关断相有两种控制状态,分别为=1开通状态与=0续流状态,与单相导通区滞环设计一致。即将导通相详细设计如下:
当转矩偏差Δ递增时:若Δ>0,则将开关置于=0续流状态,当前相绕组压降为0,瞬时转矩缓慢减小;若Δ<0,则将开关置于=-1关断状态,当前相绕组为承受负压,瞬时转矩快速减小。
当转矩偏差Δ递减时:若Δ>-Δ,则将开关置于=1开通状态,当前相绕组励磁,瞬时转矩快速增大;若Δ<-Δ,则将开关置于=0续流状态,当前相绕组压降为0,瞬时转矩缓慢减小。
2 基于滞环控制改进的单极性PWM-DITC策略
滞环控制尽管具有结构简单、响应迅速、误差小的优点,但其开关频率不固定、控制精度与滞环宽度强相关的缺点,在换相期的两相频繁通断过程中会被成倍放大。若设计较小的滞环区间,理论上可提高系统响应速度与控制精度,降低转矩脉动,但会大幅度增加开关管的工作频率与损耗,系统或出现振荡情况,在实际运行中也可能会因为过高的开关频率导致温升过快,超过开关管工作限值,从而损坏开关器件,造成系统失控;若设计较大的滞环区间,则又会削弱系统的控制效果,无法实现对转矩脉动的良好抑制。
因此,为改善因滞环特性导致的换相区大转矩脉动,本文将单极性PWM与滞环控制相结合,针对换相导通区,将原滞环控制替换为单极性PWM控制。由于单极性PWM输出电压波形的高次谐波分量小、开关频率低,且其每半个输出电压周期中2个桥臂切换高低频的工作模式,对于同样规格的IGBT功率元件,其开关损耗也较小。通过使用单极性PWM控制,换相区的较高开关频率可得到一定程度的抑制,进而降低因换相期间高频通断所导致的转矩波动。
该型控制策略的系统框图如图6所示。
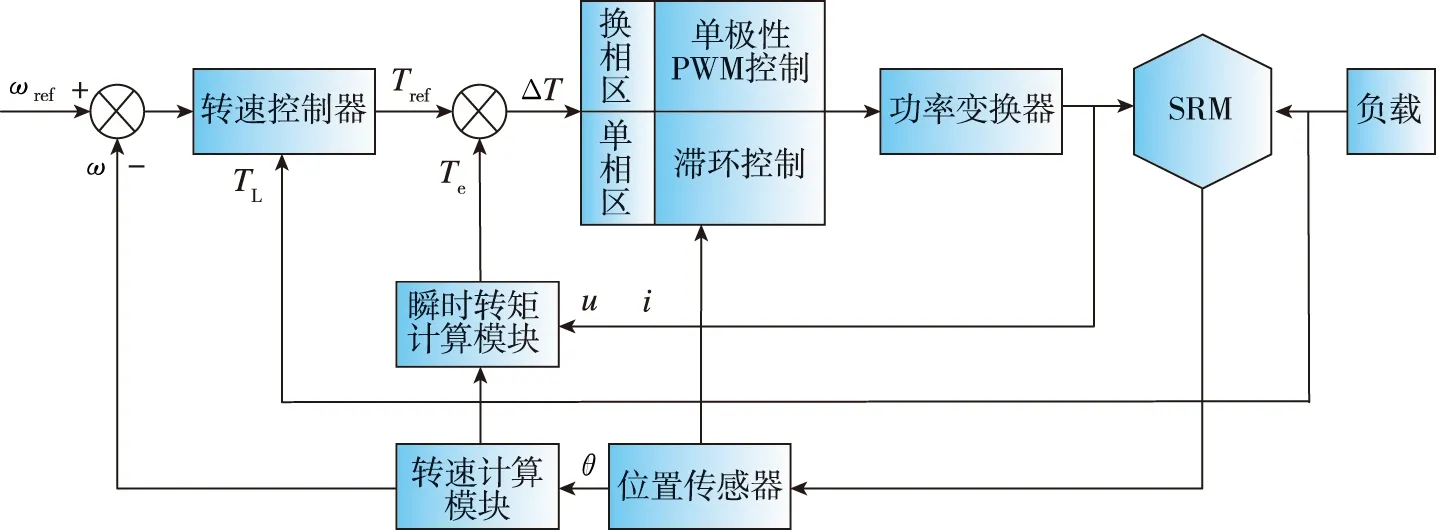
图6 单极性PWM-DITC系统框图Fig.6 Block diagram of unipolar PWM-DITC system
转矩偏差输入单极性PWM-DITC算法模块后,根据位置信息判断各相绕组所处导通区域,当处于单相导通区时,保持原滞环控制;当处于换相导通区时,采用单极性PWM控制,确定输出给功率变换器的逻辑控制信号,即+1、0、-1开关状态,进而完成对SRM的控制。换相导通区单极性PWM设计如图7和图8所示。
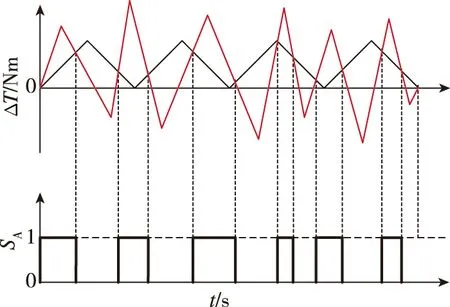
图7 即将导通相AFig.7 Phase A to be switch on
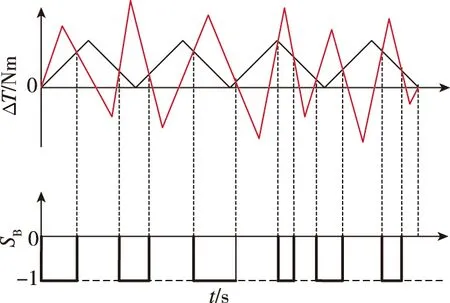
图8 即将关断相BFig.8 Phase B to be shut off
对即将导通相A,采用+1、0开关逻辑:即当转矩偏差Δ大于三角载波时,为使即将导通相瞬时转矩增大,尽快接替即将关断相瞬时转矩,故将开关置为+1开通状态,A相快速励磁,从而减小转矩误差,随着逐渐增大,Δ减小;当转矩偏差Δ小于三角载波时,为缓慢减小导通相瞬时转矩,将开关置为0续流状态。
对即将关断相B,采用0、-1开关逻辑,即当转矩偏差Δ大于三角载波时,为快速地过渡与,不再增加即将关断相瞬时转矩,故将开关置为0续流状态,只通过A相励磁使Δ减小;当转矩偏差Δ小于三角载波时,为快速减小即将关断相,将开关置为-1关断状态,B相反相退磁,使快速减小。
3 系统仿真与结果分析
本仿真系统根据图1与图6的系统框图搭建,主要包含由仿真软件提供的10kW三相6/4极SRM模块、PID调速模块、位置采集模块、转矩控制模块、功率变换器模块。
3.1 仿真参数设定
转矩控制模块内部控制算法采用S函数编写完成,开通角及关断角分别设定为50°、85°,滞环限为Δ=05、Δ=03,单极性PWM-DITC模块的三角载波频率设定为8kHz。给定转速=14000r/min,在1.5s时,令负载转矩由3Nm向6.5Nm跃变。
3.2 仿真结果分析
SRM在滞环DITC与单极性PWM-DITC下的相电流及转矩波形如图9~图16所示。负载变动时和转矩稳定时的仿真结果对比分别如表1和表2所示。

表1 负载变动时的仿真结果对比Tab.1 Comparison of output torque simulation results

表2 转矩稳定时的仿真结果对比Tab.2 Comparison of output torque simulation results

图9 滞环DITC下负载变动时的相电流Fig.9 Current of load change under hysteresis DITC

图10 单极性PWM-DITC下负载变动时的相电流Fig.10 Current of load change under unipolar PWM-DITC
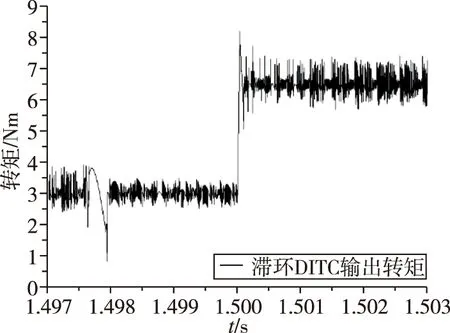
图11 滞环DITC下负载变动时的输出转矩Fig.11 Torque of load change under hysteresis DITC
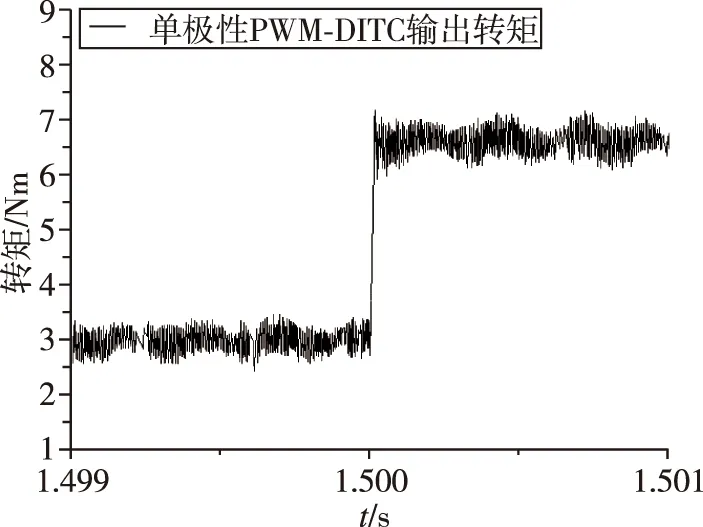
图12 单极性PWM-DITC下负载变动时的输出转矩Fig.12 Torque of load change under unipolar PWM-DITC
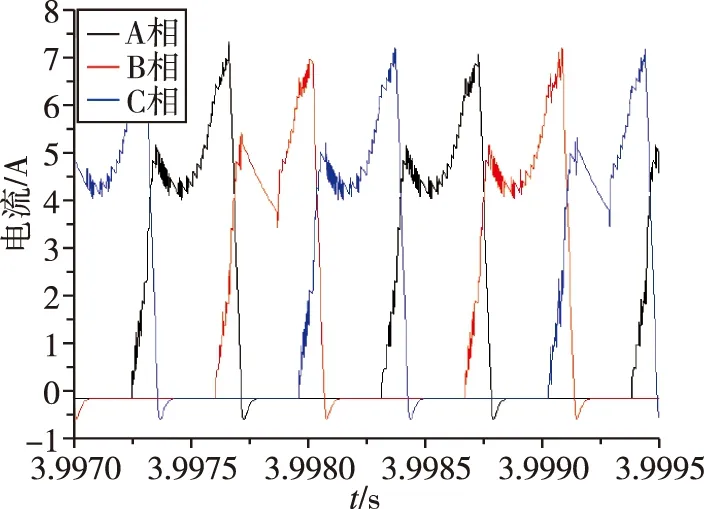
图13 滞环DITC下稳定运行时的相电流Fig.13 Current of stable operation under hysteresis DITC

图14 单极性PWM-DITC下稳定运行时的相电流Fig.14 Current of stable operation under unipolar PWM-DITC
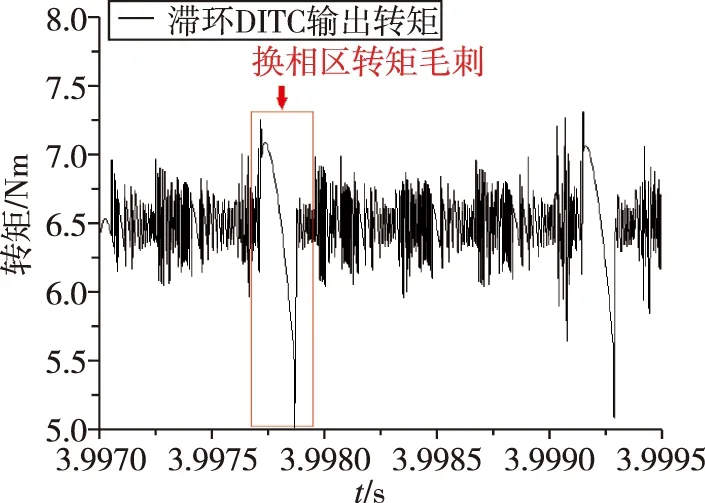
图15 滞环DITC下稳定运行时的输出转矩Fig.15 Torque of stable operation under hysteresis DITC
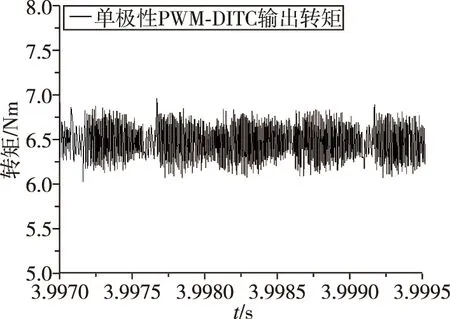
图16 单极性PWM-DITC下稳定运行时的输出转矩Fig.16 Torque of stable operation under unipolar PWM-DITC
由图11和图12可知,当系统负载转矩于1.5s由3Nm跃变至6.5Nm时,经单极性PWM-DITC下的转矩稳定维持在5.9Nm~7.1Nm之间,转矩脉动率约为18.4%,负载变动过程平滑;而滞环DITC下的转矩在负载变动时则出现了较大波动,转矩脉动区间达到了3.2Nm,转矩脉动率高达49.2%。由此可知,单极性PWM-DITC可有效减小负载变动时引起的大转矩脉动,避免系统出现振荡情况,其抗负载扰动能力远强于滞环DITC方式。
当SRM处于稳定运行状态时,由图13和图14可知,单极性PWM-DITC下的三相电流峰值相较于滞环DITC下的三相电流峰值减小约7%,单极性PWM-DITC对稳态下的相电流有小幅度优化;由图15和图16可得,滞环DITC下的转矩在5.1Nm~7.3Nm之间波动,转矩脉动率约为33.8%,单极性PWM-DITC的转矩则在6.0Nm~6.9Nm之间波动,转矩脉动率约为13.8%,对比滞环DITC转矩脉动率降低约59.2%。单极性PWM-DITC下的换相区转矩波形毛刺明显少于滞环DITC,稳态输出转矩得到大幅度优化,故单极性PWM-DITC可有效地抑制换相区转矩脉动。
4 结 论
本文提出了一种基于滞环DITC改进的单极性PWM-DITC策略,系统地介绍了单极性PWM-DITC原理与设计思想,并对其进行了仿真设计与验证。仿真结果表明,单极性PWM-DITC策略相较于滞环DITC策略,可有效抑制换相区的大转矩脉动,使换相期间的导通相与关断相转矩能够相对平滑地完成过渡;同时单极性PWM-DITC策略下的SRM具有良好的抗负载扰动能力,可大幅度降低负载转矩变动时引起的转矩脉动。综上所述,本文提出的PWM-DITC策略充分优化了转矩控制效果,实现了SRM转矩的平稳控制,提高了系统转矩控制能力。
猜你喜欢
中学生报·教育教学研究(2022年1期)2022-04-18
新传奇(2020年48期)2020-12-28
科学与财富(2020年24期)2020-10-27
时代英语·高一(2019年5期)2019-09-03
科学与财富(2019年11期)2019-08-06
食品界(2019年5期)2019-05-23
速读·下旬(2019年3期)2019-04-11
阅读(低年级)(2018年5期)2018-05-14
科学与财富(2017年27期)2017-10-17
现代畜牧科技(2015年11期)2015-10-21
