例谈轨迹方程的求解方法
2022-04-08 00:54华腾飞
中学数学杂志(高中版) 2022年2期


【摘 要】 在学习解析几何的过程中,我们经常会遇到求解轨迹方程问题,有些同学对此类问题常常会觉得无从入手.本文举例说明求解此类问题的几种行之有效的方法——定义法、反置代换法、直接法、参数法、交轨法、几何法、转移法,以期对同学们的解题技能和解题技巧的提高有所帮助.
【关键词】 轨迹方程;方法灵活;求解
求解曲线的轨迹方程是高考的考点,也是高中数学知识中的一个难点.困难在于其涉及的动点比较多、未知量也多,特别是对于多动点轨迹方程问题的求解,许多同学感觉更是难上加难,原因在于这部分同学很难找到解题的切入点.其实,对于动点问题可以分为主动点和从动点两种情况,即一个相当于自变量,一个相当于因变量,只要弄清楚其间的关系,问题就会很容易入手,若再能做到灵活地运用知识,找到巧妙的解题方法,则问题很容易获解.
1 定义法
如果动点的轨迹符合某种曲线的定义,这时只需要判断出轨迹的形状,然后根据题给条件求出曲线方程即可.
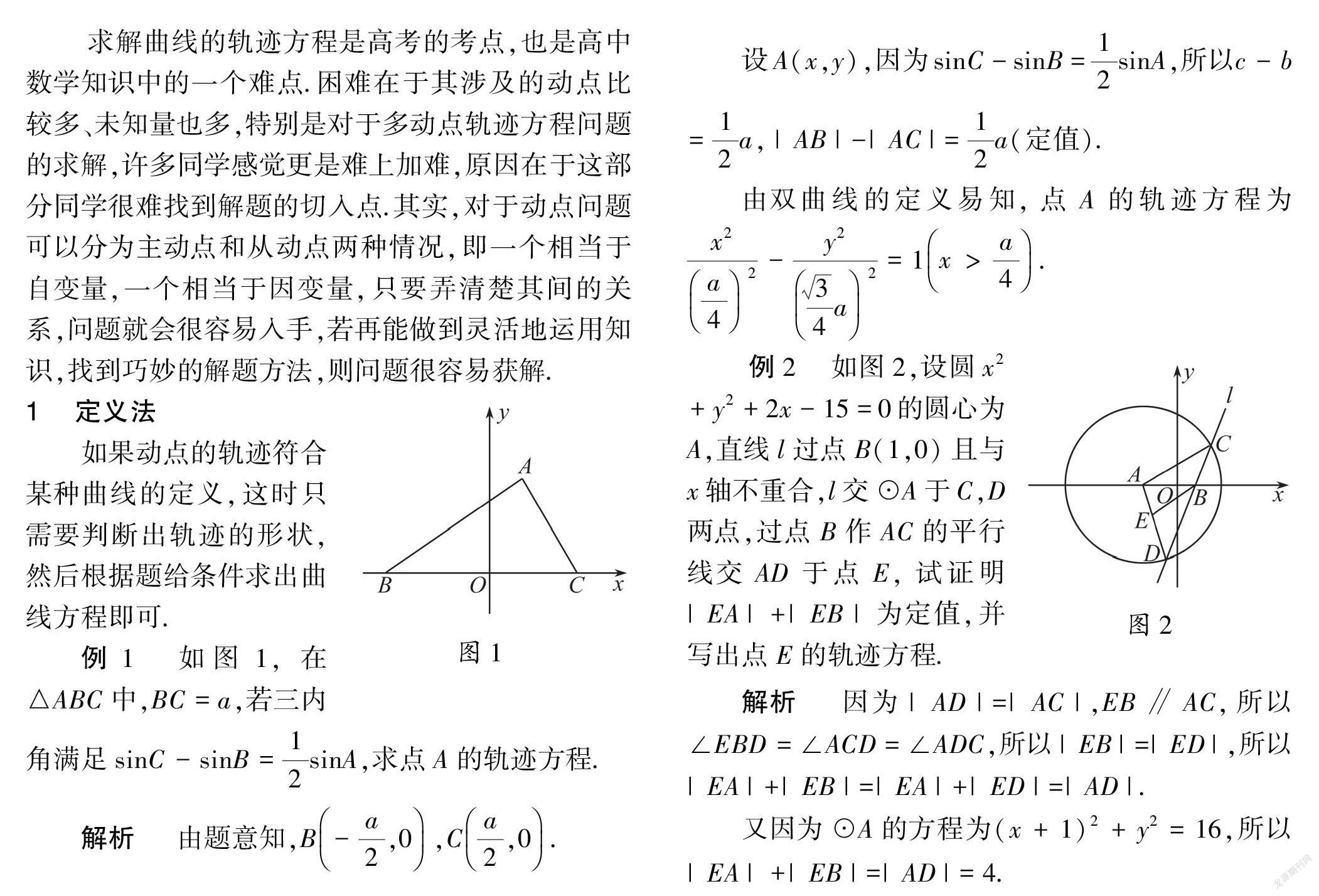
例1 如图1,在△ABC中,BC=a,若三内角满足sinC-sinB=12sinA,求点A的轨迹方程.
解析 由题意知,B-a2,0,Ca2,0.
设A(x,y),因为sinC-sinB=12sinA,
所以c-b=12a,|AB|-|AC|=12a(定值).
由双曲线的定义易知,点A的轨迹方程为x2a42-y234a2=1x>a4.
例2 如图2,设圆x2+y2+2x-15=0的圆心为A,直线l过点B(1,0)且与x轴不重合,l交⊙A于C,D两点,过点B作AC的平行线交AD于点E,试证明|EA|+|EB|为定值,并写出点E的轨迹方程.
解析 因为|AD|=|AC|,EB∥AC,所以∠EBD=∠ACD=∠ADC,所以|EB|=|ED|,
所以|EA|+|EB|=|EA|+|ED|=|AD|.
又因为⊙A的方程为(x+1)2+y2=16,所以|EA|+|EB|=|AD|=4.
由题设得A(-1,0),B(1,0),所以|AB|=2.
由椭圆的定义可得点E的轨迹方程为x24+y23=1(y≠0).
例3 如图3,已知P是正三棱锥SABC的侧面SBC内一点,P到底面ABC的距离与到点S的距离相等,则动点P的轨迹是( ).
A.圆 B.椭圆
C.双曲线 D.抛物线
解析 设正四面体SABC的侧面与底面所成的角为θ,则有cosθ=13,所以sinθ=223.
过点P作PE⊥BC,垂足为E,连接OE,则OE⊥BC,所以sin∠OEP=223.
设SP=b,在Rt△POE中,PE=OP223=3b22,所以SPPE=b3b22=223<1.
由椭圆的定义可知动点P的轨迹是椭圆.应选B.
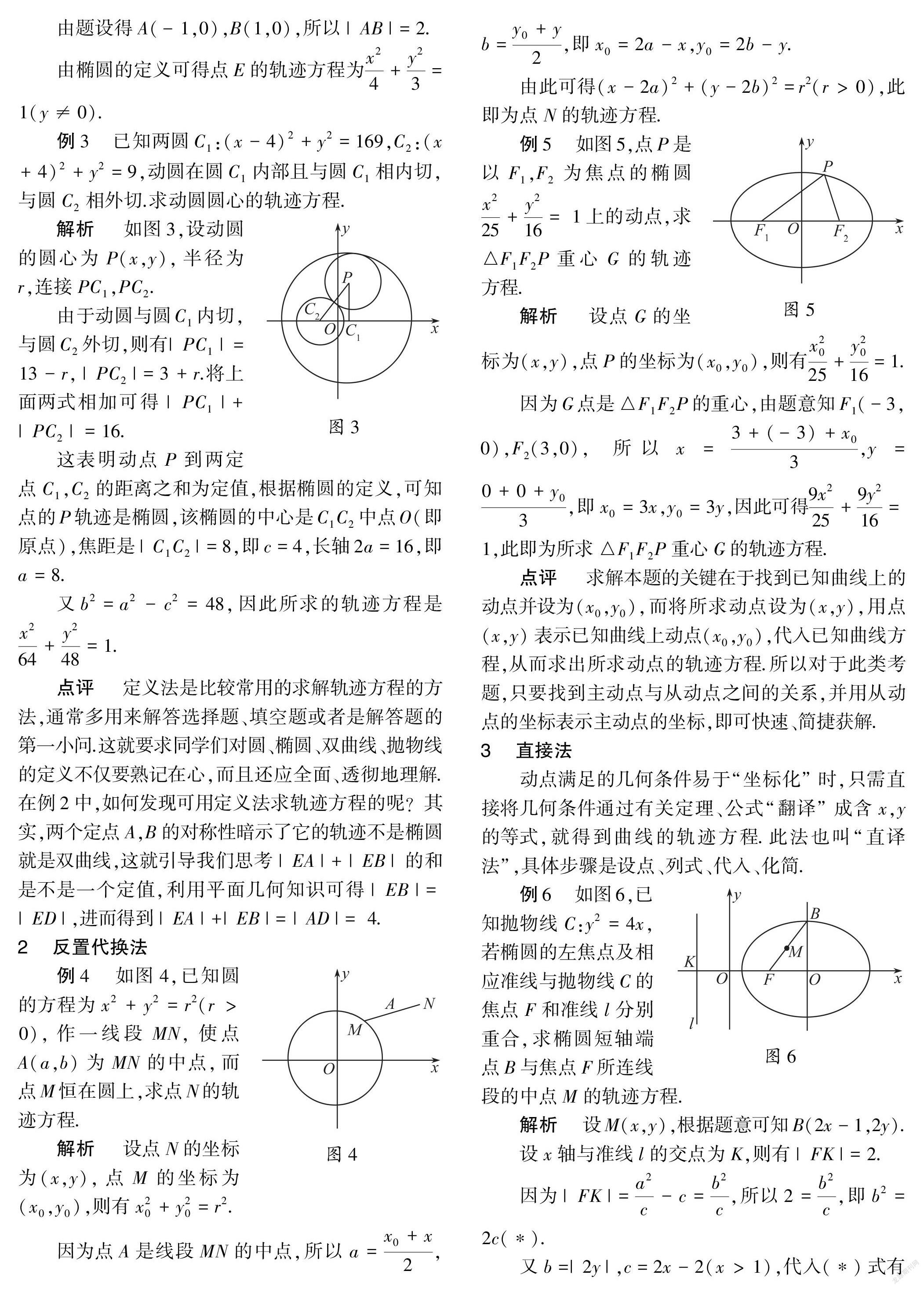
例3 已知两圆C1:(x-4)2+y2=169,C2:(x+4)2+y2=9,动圆在圆C1内部且与圆C1相内切,与圆C2相外切.求动圆圆心的轨迹方程.
解析 如图3,设动圆的圆心为P(x,y),半径为r,连接PC1,PC2.
由于动圆与圆C1内切,与圆C2外切,则有|PC1|=13-r,|PC2|=3+r.
将上面两式相加可得|PC1|+|PC2|=16.
这表明动点P到两定点C1,C2的距离之和为定值,根据椭圆的定义,可知点的P轨迹是椭圆,该椭圆的中心是C1C2中点O(即原点),焦距是|C1C2|=8,即c=4,长轴2a=16,即a=8.
又b2=a2-c2=48,因此所求的轨迹方程是x264+y248=1.
点评 定义法是比较常用的求解轨迹方程的方法,通常多用来解答选择题、填空题或者是解答题的第一小问.这就要求同学们对圆、椭圆、双曲线、抛物线的定义不仅要熟记在心,而且还应全面、透彻地理解.在例2中,如何發现可用定义法求轨迹方程的呢?其实,两个定点A,B的对称性暗示了它的轨迹不是椭圆就是双曲线,这就引导我们思考|EA|+|EB|的和是不是一个定值,利用平面几何知识可得|EB|=|ED|,进而得到|EA|+|EB|=|AD|=4.
例3是以空间几何体为载体,考查我们对投影、二面角的理解,以及对椭圆的第二定义的理解、掌握情况,即椭圆上的点到一个定点的距离与到一条线的距离之比小于1.
2 反置代换法图4
例4 如图4,已知圆的方程为x2+y2=r2(r>0),作一线段MN,使点A(a,b)为MN的中点,而点M恒在圆上,求点N的轨迹方程.
解析 设点N的坐标为(x,y),点M的坐标为(x0,y0),则有x20+y20=r2.
因为点A是线段MN的中点,所以a=x0+x2,b=y0+y2,即x0=2a-x,y0=2b-y.由此可得(x-2a)2+(y-2b)2=r2(r>0),此即为点N的轨迹方程.图5
例5 如图5,点P是以F1,F2为焦点的椭圆x225+y216=1上的动点,求△F1F2P重心G的轨迹方程.
解析 设点G的坐标为(x,y),点P的坐标为(x0,y0),则有x2025+y2016=1.
因为G点是△F1F2P的重心,由题意知F1(-3,0),F2(3,0),
所以x=3+(-3)+x03,y=0+0+y03,即x0=3x,y0=3y,
因此可得9x225+9y216=1,此即为所求△F1F2P重心G的轨迹方程.
点评 求解本题的关键在于找到已知曲线上的动点并设为(x0,y0),而将所求动点设为(x,y),用点(x,y)表示已知曲线上动点(x0,y0),代入已知曲线方程,从而求出所求动点的轨迹方程.所以对于此类考题,只要找到主动点与从动点之间的关系,并用从动点的坐标表示主动点的坐标,即可快速、简捷获解.
3 直接法
动点满足的几何条件易于“坐标化”时,只需直接将几何条件通过有关定理、公式“翻译”成含x,y的等式,就得到曲线的轨迹方程.此法也叫“直译法”,具体步骤是设点、列式、代入、化简.
例6 如图6,已知抛物线C:y2=4x,若椭圆的左焦点及相应准线与抛物线C的焦点F和准线l分别重合,求椭圆短轴端点B与焦点F所连线段的中点M的轨迹方程.
解析 设M(x,y),根据题意可知B(2x-1,2y).
设x轴与准线l的交点为K,则有|FK|=2.
因为|FK|=a2c-c=b2c,所以2=b2c,即b2=2c(*).
又b=|2y|,c=2x-2(x>1),代入(*)式有4y2=2(2x-2),即y2=x-1(x>1)为所求点M的轨迹方程.
例8 动点P到直线x+y=6的距离的平方等于由两坐标轴及点P到两坐标轴之垂线所围成的矩形面积,求点P的轨迹方程.
解析 设动点P(x,y),则S矩形=|xy|,点P到直线x+y=6的距离d=|x+y-6|2.
因为d2=S,所以|x+y-6|22=|xy|,即(x+y-6)2=2|xy|.
当xy≥0时,点P的轨迹方程为(x-6)2+(y-6)2=36;当xy<0时,点P的轨迹方程为x2+4xy+y2-12x-12y+36=0.
例7 设椭圆x2a+y2b=1(a>b>0)的左、右焦点分别为F1,F2,A是椭圆上的一点,AF2⊥F1F2,原点O到直线AF1的距离为13|OF1|.设Q1,Q2为椭圆上的两个动点,OQ1⊥OQ2,过原点O作直线Q1Q2的垂线OD,垂足为D,求点D的轨迹方程.
解析 设D(x0,y0),当y0≠0时,由OD⊥Q1Q2,得直线Q1Q2的方程为y=-x0y0(x-x0)+y0.
令k=-x0y0,m=x20y0+y0,即y=kx+m.
点Q1(x1,y1),Q2(x2,y2)满足方程组y=kx+m,x2+y2=2b2.消去y得(1+2k2)x2+4kmx+2m2-2b2=0.可知x1+x2=-4km1+2k2,x1x2=2m2-2b21+2k2. ①
又y1y2=(kx1+m)(kx2+m)=k2x1x2+km(x1+x2)+m2=m2-2b2k21+2k2. ②由OQ1⊥OQ2,知x1x2+y1y2=0,将①②代入得3m2-2b2-2b2k21+2k2=0. ③
将k=-x0y0,m=x20y0+y0代入③整理,得x20+y20=23b2.当y0=0时,验证上式也成立.
故点D的轨迹方程为x2+y2=23b2.
4 参数法
引入第三个变量t(参数),建立起动点P(x,y)的坐标x,y与t的关系式F1(x,y,t)=0,F2(x,y,t)=0,或x=f(t),y=g(t).从上述关系式中消去参数t,便可得到动点P(x,y)的轨迹方程F(x,y)=0.
例8 如图7,给出定点A(a,0)(a>0)和直线l上的动点,∠BOA的角平分线交AB于点C,求点C的轨迹方程.
解析 设C(x,y),直线l上动点B的坐标为(-1,tanθ)(θ为参数,-π2<θ<π2),则有|OB|=1+tan2θ=secθ.
因为OC平分∠AOB,所以|AC||CB|=|OA||OB|=Acosθ,即C是AB的内分点,则由定比分点坐标公式得x=a-acosθ1+acosθ,y=asinθ1+acosθ.
解得cosθ=a-xa(1+x),sinθ=(1+a)ya(1+x).
因为sin2θ+cos2θ=1,所以(1-a)x2-2ax+(1+a)y2=0(0≤x<a).
这就是点C的轨迹方程.
例9 過抛物线y2=2px(p>0)顶点O,作相互垂直的弦OA,OB,求AB中点M的轨迹方程.解析 方法1:设At212p,t1,Bt222p,t2,M(x,y).
因为OA⊥OB,所以kOA·kOB=-1,即2pt1t21·2pt2t22=-1,据此可得t1t2=-4p2. ①
因为M为线段AB的中点,所以x=t21+t224p, ②
y=t1+t22. ③
将③式平方可得:4y2=(t1+t2)2=t21+t22+2t1t2,并将①②代入,消去参数t1,t2,从而得到点M的轨迹方程为y2=px-2p2.
方法2:设A(x1,y1),B(x2,y2),M(x,y),
则根据题意有y21=2px1, ①y22=2px2, ②2x=x1+x2, ③2y=y1+y2, ④
x1x2+y1y2=0. ⑤
将①②代入③得4px=y21+y22, ⑥
由①×②得x1x2=y21y224p2, ⑦
将⑦代入⑤得y1y2=-4p2, ⑧
将④平方并将⑥⑧代入,得4y2=4px-8p2,故所求点M的轨迹方程为y2=px-2p2.
例12 如图9,已知抛物线y2=2px(p>0),O为顶点,AB为抛物线的弦,且OA⊥OB,求弦AB的中点P的轨迹方程.
解析 设弦的两端点为A(2pt21,2pt1),B(2pt22,2pt2),弦的中点为P(x,y),则有x=p(t21+t22) ①y=p(t1+t2) ②
因为OA⊥OB,设kAO=1t1,kBO=1t2,所以
t1·t2=-1 ③
由②平方得y2=p2(t21+t22)+2p2t1t2④
将①③代入④,可得所求的轨迹方程为y2=p(x-2p).
例10 如图8,设λ>0,点A的坐标为(1,1),点B在抛物线y=x2上运动,点Q满足BQ=λQA,经过点Q与x轴垂直的直线交抛物线于点M,点P满足QM=λMP,求点P的轨迹方程.
解析 设点P(x,y),由题意可得QxB+λ1+λ,x2B+λ1+λ,xM=xQ=x,所以xB=(1+λ)x-λ.
又x2=yQ+λy1+λ,可得(1+λ)x2=x2B+λ1+λ+λy,
即(1+λ)2x2-λ(1+λ)y-(x2B+λ)=0,
于是可得(1+λ)2x2-λ(1+λ)y-[(1+λ)x-λ]2-λ=0,
化简可得y=2x-1.点评 例9是A,B两个主动点,例10是B,Q,M三个主动点,虽然问题较为复杂,但不是无章可循的.求解此类问题,关键是要找到两类动点之间的关系,只不过需要借助参数才能建立两类动点之间的关系.例9是以t1,t2建立参数,例10是以xB,λ为参数.从以上两例可以看出,恰当地选择参数可以对问题的顺利解答起到事半功倍的作用.
5 交轨法
如果所求轨迹是由两条动曲线(包括直线)的交点所得,其一般解法是恰当地引进一个参数,写出两条动曲线的方程,消去参数,所得方程便是所求的轨迹方程.
例11 设椭圆与双曲线有共同的焦点F1(-4,0),F2(4,0),且椭圆的长轴长是双曲线实轴长的2倍.求椭圆与双曲线交点的轨迹.
解析 设双曲线的实半轴长为a(2<a<4),则椭圆长半轴长为2a,由半焦距为4可得:
x2a2-y216-a2=1, ①
x24a2+y24a2-16=1.②
解得y2=(a2-4)(16-a2)4,代入①可得
a2=2|x|,所以x22|x|-y216-2|x|=1.
当x>0时,得(x-5)2+y2=9;当x<0时,得(x+5)2+y2=9.
由2<a<4,知2<|x|<8,故所求轨迹半径为3,分别以(5,0)及(-5,)为圆心的两个圆.
例12 椭圆x24+y2=1与x轴的交点为A(2,0),A′(-2,0),与y轴平行的直线交该椭圆于P,P′两点,试求AP和A′P′交点Q的轨迹方程.
解析 如图9,设平行于y轴的直线x=x1.
设P(x1,y1),P′(x1,-y1),Q(x,y),则有
x214+y21=1, ①
当x1≠±2时,直线AP和A′P′的方程分别为
y=y1x1-2(x-2), ②
y=-y1x1+2(x+2), ③
因为交点Q满足②③,则由②×③可得
y2=-y22x21-4(x2-4), ④
由①得x21-4=-4y21,将其代入④得y2=14(x2-4),即x24-y2=1.
当x1=±2时,可得点Q的坐标为(±2,0),也满足x24-y2=1.
所以交点Q的轨迹方程是x24-y2=1.
6 几何法
动点的几何特性与平面几何的定理有着直接或间接地联系,且利用平面几何的基本知识得到包含已知量和动点坐标的等式,化简后即可得所求轨迹方程.
例13 在直角坐标系平面内,P(3,4)为定点,过P作相互垂直的两直线l1,l2,其中l1交x轴于点M,l2交y轴于点N,求线段MN中点Q的轨迹方程.
解析 如图10,因为∠NPM=∠NOM=90°,所以M,O,N,P四点共圆,点Q即为圆心.
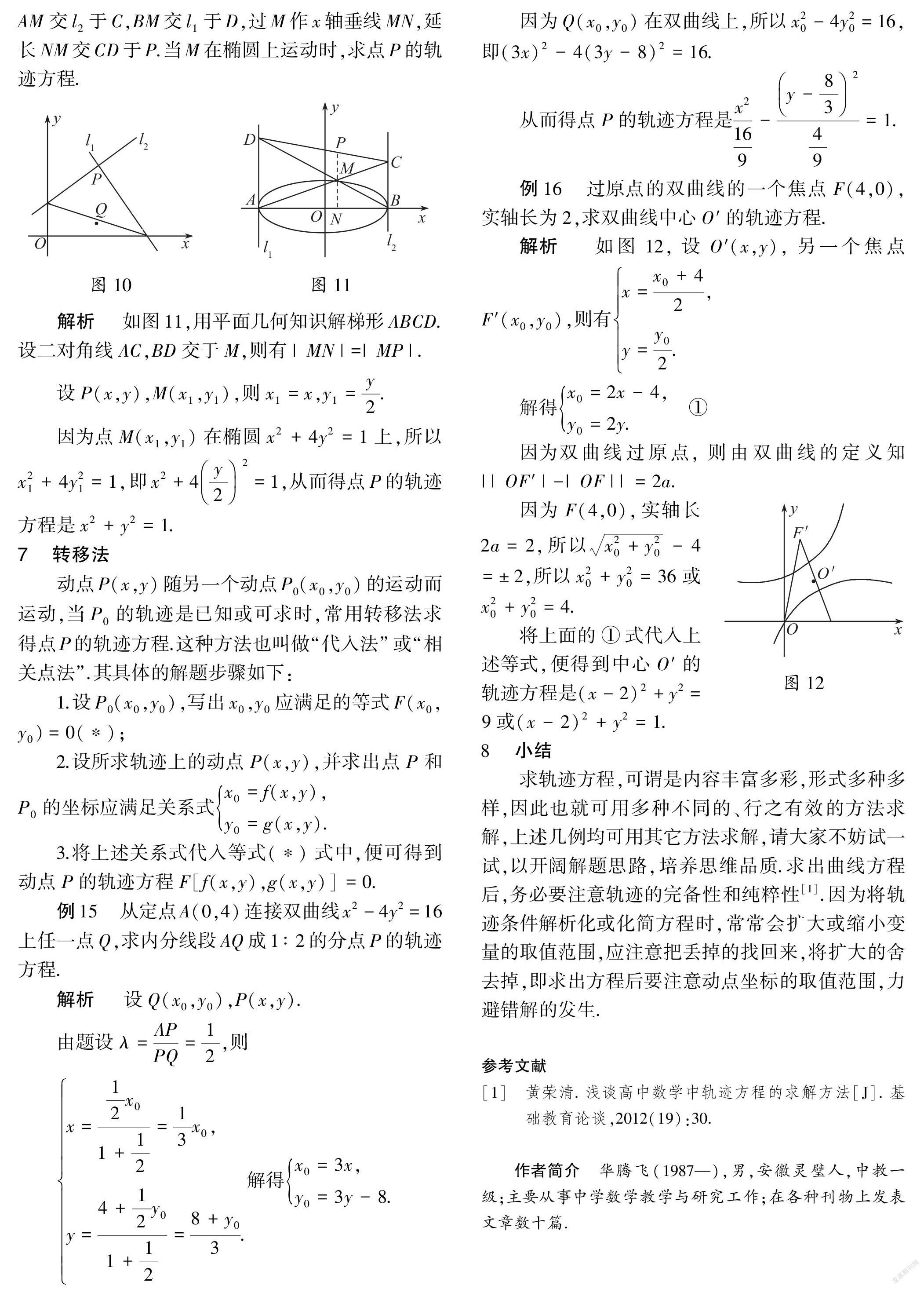
设Q(x,y),因为|QO|=|PQ|,所以x2+y2=(x-3)2+(y-4)2,化简得点Q的轨迹方程为6x+8y-25=0.例14 已知椭圆x2+4y2=1,l1,l2是经过椭圆长轴的二端点A,B的切线,当M为椭圆上任一点,AM交l2于C,BM交l1于D,过M作x轴垂线MN,延长NM交CD于P.当M在椭圆上运动时,求点P的轨迹方程.
解析 如图11,用平面几何知识解梯形ABCD.设二对角线AC,BD交于M,则有|MN|=|MP|.
设P(x,y),M(x1,y1),则x1=x,y1=y2.
因为点M(x1,y1)在椭圆x2+4y2=1上,所以x21+4y21=1,即x2+4y22=1,从而得点P的轨迹方程是x2+y2=1.
7 转移法
动点P(x,y)随另一个动点P0(x0,y0)的运动而运动,当P0的轨迹是已知或可求时,常用转移法求得点P的轨迹方程.这种方法也叫做“代入法”或“相关点法”.其具体的解题步骤如下:
1.设P0(x0,y0),写出x0,y0应满足的等式F(x0,y0)=0(*);
2.设所求轨迹上的动点P(x,y),并求出点P和P0的坐标应满足关系式x0=f(x,y),y0=g(x,y).
3.将上述关系式代入等式(*)式中,便可得到动点P的轨迹方程F[f(x,y),g(x,y)]=0.
例15 从定点A(0,4)连接双曲线x2-4y2=16上任一点Q,求内分线段AQ成1∶2的分点P的轨迹方程.
解析 设Q(x0,y0),P(x,y).由题设λ=APPQ=12,则x=12x01+12=13x0,y=4+12y01+12=8+y03.解得x0=3x,y0=3y-8.
因为Q(x0,y0)在双曲线上,所以x20-4y20=16,即(3x)2-4(3y-8)2=16.从而得点P的轨迹方程是x2169-y-83249=1.
例16 过原点的双曲线的一个焦点F(4,0),实轴长为2,求双曲线中心O′的轨迹方程.
解析 如图12,设O′(x,y),另一个焦点F′(x0,y0),則有x=x0+42,y=y02.
解得x0=2x-4,y0=2y. ①
因为双曲线过原点,则由双曲线的定义知||OF′|-|OF||=2a.
因为F(4,0),实轴长2a=2,所以x20+y20-4=±2,所以x20+y20=36或x20+y20=4.
将上面的①式代入上述等式,便得到中心O′的轨迹方程是(x-2)2+y2=9或(x-2)2+y2=1.
8 小结
求轨迹方程,可谓是内容丰富多彩,形式多种多样,因此也就可用多种不同的、行之有效的方法求解,上述几例均可用其它方法求解,请大家不妨试一试,以开阔解题思路,培养思维品质.求出曲线方程后,务必要注意轨迹的完备性和纯粹性[1].因为将轨迹条件解析化或化简方程时,常常会扩大或缩小变量的取值范围,应注意把丢掉的找回来,将扩大的舍去掉,即求出方程后要注意动点坐标的取值范围,力避错解的发生.
参考文献
[1] 黄荣清. 浅谈高中数学中轨迹方程的求解方法[J]. 基础教育论谈,2012(19):30.
作者简介 华腾飞(1987—),男,安徽灵璧人,中教一级;主要从事中学数学教学与研究工作;在各种刊物上发表文章数十篇.