故障位置特征表达的盲区识别与电气坐标系扩展
2022-04-11 06:15李常刚刘玉田闫炯程
电力系统自动化 2022年7期
齐 航,任 喆,李常刚,刘玉田,闫炯程
(电网智能化调度与控制教育部重点实验室(山东大学),山东省 济南市 250061)
0 引言
随着双碳目标的明确提出,中国新能源发电占比将进一步提升[1-2]。新能源固有的间歇性和强波动性使得电力系统面临的动态安全风险显著增加[3-5]。为保证系统安全稳定运行,需针对复杂多变的电网状况抽样生成大量可能出现的场景,并通过动态安全评估(dynamic security assessment,DSA)及时识别系统潜在的动态安全风险。基于时域仿真的DSA 是常用的模型驱动类评估方法[6]。然而,当评估海量的“场景-故障”组合时[7],基于时域仿真的DSA 耗时严重,难以满足在线评估的时效性。近年来,大量研究倾向于采用数据驱动的DSA 方法[8],基于机器学习技术构建DSA 模型,以提高动态安全在线评估效率。
电力系统动态安全与故障位置密切相关。传统基于数据驱动的DSA 普遍依靠时域仿真获得故障后的系统动态响应特征[9-11],并将其作为机器学习模型的输入。此类方法应用于超前时间尺度下海量“场景-故障”组合的在线评估时,仍存在时域仿真类评估方法的不足。文献[12-13]采用故障前的稳态潮流特征,构建安全域概念下的DSA 模型。然而,此类方法不具备对故障位置的泛化能力,无法实现单一模型适用于多个故障位置,在评估多个故障位置时存在模型数量灾的问题。因此,现有数据驱动的DSA 缺乏统一的故障位置特征表达方法。构建统一的故障位置特征表达体系,是实现安全域概念下统一计及故障位置的DSA 的关键。
文献[14-15]分别采用整数编码和二进制编码作为故障位置输入特征,构建统一的DSA 模型,但编码特征存在离散且不具备电气意义的缺陷。文献[16]采用故障线路切除后的电力系统邻接矩阵反映故障位置。文献[17]采用故障前的邻接矩阵,并结合0-1 变量表示该线路上是否存在故障。然而,邻接矩阵规模过大会使得模型训练困难,且无法区分同一条线路上的不同故障位置。文献[18]采用迁移学习(transfer learning,TL)将特定故障位置的评估模型迁移到其他故障位置,但该方法要求不同运行方式下的故障集不同,无法适用于同一运行方式下不同故障的评估。
为实现具备电气意义且连续的故障位置特征表达,文献[19]提出了一种电气坐标系(electrical coordinate system,ECS)概念,并初步应用于数据驱动的暂态稳定评估(transient stability assessment,TSA)中,实现了TSA 对故障位置的统一计及,避免了模型数量灾问题,在数据驱动的DSA 中具备良好的应用前景。然而,考虑系统全局范围内节点间电气位置关系构建的电气坐标系,可能存在局部区域故障位置表征精度不足的缺陷。
本文在已有ECS 的基础上,提出了故障位置特征表达的盲区识别与ECS 扩展方法,提高了ECS 的故障位置特征表达能力。首先,分析ECS 在局部区域故障位置表征精度不足的原因,定义故障位置特征表达的盲点、盲线和盲区;接着,提出考虑两点间位置关系的盲线判定原理和考虑邻接线路的盲线快速搜索方法;然后,基于邻接矩阵提出初始盲区的识别方法,并基于DSA 模型评估结果对初始盲区进行微调,通过扩展ECS 参考节点提高对盲区的故障位置表征精度;最后,以中国某省级电网为例,验证了本文所提盲区识别和ECS 扩展方法的有效性。
1 基于ECS 的故障位置特征表达问题分析
1.1 ECS 简介
选择一定数量的母线节点作为参考节点,以故障位置距各参考节点的电气距离组成高维坐标向量,据此构建的坐标系称为ECS。在ECS 中,电网任意故障位置均具备电气坐标向量与之对应,实现了具备电气意义且连续的故障位置特征表达。基于ECS 的故障位置特征表达思路如图1 所示。图中,d1、d2、d3分别表示节点到第1、第2、第3 个参考节点间的电气距离。将ECS 应用到数据驱动的TSA中,实现了安全域概念下TSA 对故障位置的统一计及。

图1 基于ECS 的故障位置特征表达思路Fig.1 ECS-based feature representation idea of fault location
ECS 对节点间相对电气位置关系的表征精度可用相关性ρ 表示:

式中:d 为系统中任意两节点间电气距离组成的集合;D 为任意两节点在ECS 中的坐标欧氏距离组成的集合;cov(d,D)为集合d 与D 间的协方差;σd和σD分别为集合d 和D 的标准差。ρ 值越大,表明ECS对节点电气位置的表征精度越高,反之则表征精度越低。
ρ 的大小与参考节点密切相关。在ECS 构建过程中,应以系统所有节点间的相关性ρ 最大为优化目标,使用基于贪心策略的参考节点快速优化方法[19]求解得到参考节点组合。上述ECS 优化方法力图使电气距离较近的两节点在ECS 中的坐标欧氏距离相对较近,电气距离较远的两节点间的坐标欧氏距离相对较远,即在ECS 下保持各节点间的相对电气位置关系,以保留尽可能多的网络拓扑信息。本文称上述ECS 最优化原则为“结构保持”原则。
1.2 局部区域故障位置表征精度不足的原因分析
以全局ρ 最大化为目标所得的ECS,虽然能够保持尽可能多的节点间相对位置关系,但对不同区域的故障位置表征精度仍存在差异,在某些局部区域内可能存在表征精度不足的问题。
以美国新英格兰39 节点系统为例,基于参考节点快速优化方法构建ECS,其相关性如附录A 图A1所示。该算例下,节点间坐标欧氏距离与电气距离并不呈严格正相关分布,表明系统中存在部分位置点表征不准确,无法完全实现结构保持目标。
相关性ρ 是描述整体分布情况的统计指标,在以相关性ρ 最大为目标的参考节点优化过程中,最终的参考节点组合是根据节点间坐标欧氏距离与电气距离的整体分布情况最优而确定的。基于此参考节点组合构建的ECS,虽然能够反映系统内大部分节点间的相对电气位置关系,但无法兼顾局部区域内的节点,导致局部区域内节点不符合结构保持原则,从而使得局部区域内故障位置表征精度下降。
为行文简洁,本文将故障位置表征不准确的位置点称为“盲点”,盲点所在线路称为“盲线”,由相邻接的盲线构成的局部连通区域称为“盲区”。
为提高对盲区的故障位置表征精度,需要进一步优化ECS,实现对全网范围内的故障位置特征的准确表达。准确表征盲区内故障位置的关键是识别盲区的范围。由于盲区是由盲线构成的,识别盲区范围的首要工作是搜索盲线。
2 考虑邻接线路的ECS 盲线快速搜索
2.1 盲线判定原理及其示意性分析
ECS 对盲点位置表征不准确的具体定义为:电气距离较远的两位置点,其电气坐标欧氏距离过近。当以故障位置的电气坐标特征作为DSA 输入时,机器学习模型无法通过电气坐标特征来准确区分上述两点分别发生故障时对系统稳定性产生的影响,从而导致DSA 精度下降。
盲线的判定与所考虑的故障位置分布情况相关。本文仍采用线路等距离设置故障[19]的方式。图2(a)为系统部分线路的拓扑连接示意图,以图中的线路AB 为例阐述盲线的具体判定原理。图中,线路BC、BD 是线路AB 的邻接线路,蓝色圆点表示参考节点,红色圆点P0、P1、P2、P3为设置的4 个故障位置,点P1、P2与点P0相邻且距离相等。线路AB 上点P0、P1、P2与另一条线路上点P3间的等效电路可用图2(b)表示,其中,R1为线路AB 在P0P1段的阻抗,R2为线路AB 在P0P2段的阻抗,点P3与线路P1P2间的等效阻抗可用R3、R4表示。由于电气距离可用等效阻抗表示[20],故点P0、P1及点P0、P2间的电气距离可表示为:

图2 电路连接示意图Fig.2 Schematic diagram of circuit connection

由于P1、P2是与P0相邻且等距离的两点,即R1=R2,显然可得dP0P1=dP0P2<dP0P3。因此,线路上点P0距相邻点P1、P2的电气距离始终要小于距另一条线路上点P3的距离。在ECS 中,点P0、P1、P2、P3间的坐标欧氏距离同样也应满足上述规律。当点P3距点P0的坐标欧氏距离DP0P3小于点P1、P2距点P0的坐标欧氏距离DP0P1和DP0P2,即式(5)成立时,相较于点P1、P2,距点P0电气距离较远的点P3与点P0间的电气坐标特征差异性反而更小,使得机器学习模型难以准确区分故障点P0和P3对系统稳定性造成的影响,从而进一步影响模型的DSA 准确性。

DP0P3是由点P0、P3的电气坐标决定的,点P0、P3任意一点位置表征不准确都有可能使该式成立。因此,当式(5)成立时,本文将点P0、P3所在线路AB、BC 均判定为盲线。
2.2 盲线快速搜索方法
对于图2(a)中的线路AB,若在全网范围内搜索其他线路,判断其他线路上是否存在某点满足式(5),则所需搜索的线路数过多、计算量过大。在以全局ρ 最大化为目标所得的ECS 中,节点间整体上符合结构保持原则。因此,满足式(5)的点P3最可能出现在与线路AB 相邻接的线路上,即图2(a)中的线路BC 和BD。通过在相邻接线路上寻找是否存在某点满足式(5),可大幅提高盲线的搜索效率。基于上述分析,本文提出如图3 所示的盲线快速搜索方法流程图。通过对邻接线路上的故障位置点进行遍历,缩小了线路的搜索范围,显著降低了盲线搜索耗时。图中:L={l1,l2,…,ls}表示s 条线路组成的集合,其中s 为全网线路总数;Lblind表示盲线组成的列表;{ Pi-0,Pi-1,…,Pi-t1}表示在线路li上设置的故障位置集合,其中Pi-0表示该条线路的首端节点,Pi-t1表示末端节点;Ladjacent={li-1,li-2,…,li-h}表示与线路li相邻接线路组成的集合,其中h 为邻接线路的总数;{ Pj-1,Pj-2,…,Pj-t2}表示在线路li-j上设置的故障位置集合,但不包含线路首端节点。只需要满足条件u ∈[1,t1-1],v ∈[1,t2],使得DPi-uPj-v<min(DPi-u-1Pi-u,DPi-uPi-u+1),即判定线路li、lj为盲线,并将li、lj加入Lblind中,相同线路可以在Lblind中重复出现。一条盲线在Lblind中出现的次数越多,表明该条线路对ECS 的故障位置表征精度影响越大;反之出现次数越少,则对故障位置表征精度影响越小。

图3 盲线快速搜索方法流程图Fig.3 Flow chart of rapid searching method for blind lines
3 提升盲区故障位置特征表达能力的ECS扩展
3.1 基于邻接矩阵的初始盲区识别
由2.1 节可知,本文将电气距离远而坐标欧氏距离过近的两点所在线路均判定为盲线,故盲线的判定具有一定的保守性,导致Lblind包含的盲线数占全网线路数的比例过大,使得由盲线组成的各个盲区边界不明显,盲区识别困难。为明确区分各盲区范围,需要对Lblind中的线路进行适当缩减。
盲线在Lblind中出现的次数能够反映其对故障位置表征精度的影响程度。对Lblind中各条盲线的出现次数进行统计,保留出现次数位于前1/5、对ECS 位置表征精度影响较大的盲线,舍弃其余对表征精度影响较小的盲线,根据Lblind中剩余的盲线确定各盲区范围。与其他区域相比,DSA 模型评估盲区内故障位置时出错的风险更大。
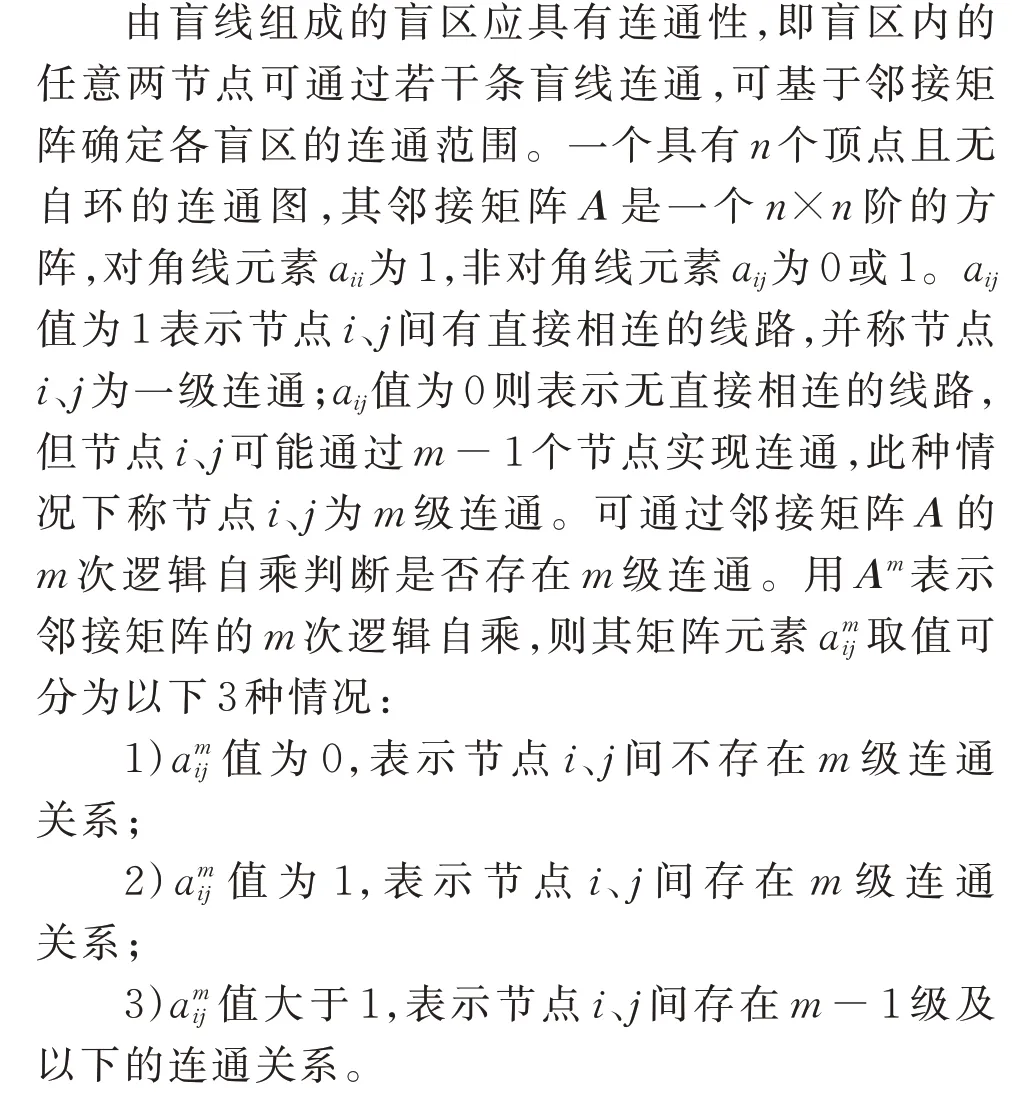
一个n 节点的系统其任意两节点间最多存在n-1 级连通关系,因此,对邻接矩阵进行n-1 次逻辑自乘运算后,根据矩阵An-1的每行(列)元素取值情况,可得到各节点间的连通性关系。本文基于邻接矩阵设计盲区识别算法如附录A 图A2 所示。
3.2 基于DSA 模型评估结果的盲区微调
3.1 节得到的初始盲区是基于反映网络结构的电气距离判断的,通过分析故障位置电气坐标是否能够保持网络原有结构,找出易导致DSA 出错的故障区域。然而,Lblind中被舍弃的盲线可能包含对DSA 模型评估精度影响较大的线路,为进一步优化盲区范围,使得盲区能够尽可能覆盖影响DSA 模型评估精度的故障位置,可根据DSA 模型的评估结果对盲区范围进行微调。具体微调方法如下:
步骤1:基于ECS 训练得到DSA 模型;
步骤2:使用该DSA 模型在测试集上进行评估,筛选出评估错误的测试样本;
步骤3:找出评估错误样本所对应的故障线路;
步骤4:若步骤3 中的故障线路非盲线,且与盲区直接连通或通过步骤3 中另一条故障线路与之连通,则将此故障线路划入盲区范围。
电力系统动态安全不仅受故障位置影响,还与系统运行方式密切相关。根据DSA 模型评估结果对盲区进行微调,基于控制变量思想,需消除运行方式对模型评估结果的影响。因此,生成样本集时仅考虑单一运行方式,即输入特征不包括运行方式特征。
3.3 ECS 的参考节点扩展
合理的特征选择能够提高DSA 精度。对于易导致DSA 评估错误的故障区域,可进一步补充合理特征以提升DSA 精度。因此,可在文献[19]中ECS参考节点的基础上,进一步增加能够准确表征各盲区内节点位置的参考节点。在本文中,将根据文献[19]方法得到的ECS 称为“初始ECS”。
新增的参考节点由各盲区参考节点组成。每个盲区的参考节点选择是以相应盲区内节点间的相关性ρ 最大为目标,仍基于文献[19]中的贪心算法,在各盲区范围内搜索最佳参考节点组合。盲区内的参考节点选择过程可描述为:

式中:Bk为由k 个节点组成的参考节点组合;{b1,b2,…,bp}为盲区内的节点集合;p 为盲区内的节点总数。
在初始ECS 参考节点的基础上增加各盲区的参考节点,并基于扩展后的参考节点组合构建ECS。在本文中,将基于扩展后的参考节点组合构建的ECS 称为“扩展ECS”。
3.4 扩展ECS 在DSA 中的应用
将扩展ECS 应用到DSA 中,实现安全域概念下统一计及故障位置的DSA。基于扩展ECS 的DSA 框架如附录A 图A3 所示。首先,在离线训练阶段获取网络线路参数和拓扑连接关系生成节点导纳矩阵,构建初始ECS;接着,根据2.2 节所提盲线快速搜索方法得到盲线,根据3.1 和3.2 节得到初始盲区并进行微调;然后,针对盲区的故障位置特征表达,构建扩展ECS;最后,基于故障位置和稳态潮流特征生成数据集,训练DSA 模型。在线评估阶段,获取故障位置在扩展ECS 下的电气坐标特征,并结合稳态潮流特征生成待评估样本,调用DSA 模型得到评估结果。
本文使用的输入特征可分为两类:第1 类是表征故障位置的电气坐标特征,即故障点至各参考节点间电气距离组成的坐标向量,特征维数与参考节点数量保持一致;第2 类是表征系统运行方式的稳态潮流特征,具体包括各发电机功率、各负荷功率、各节点电压幅值和相角。
4 算例分析
本文以安全域概念下的TSA 为例,在某省级电网算例[19]上,验证所提盲区识别和ECS 扩展方法在数据驱动的DSA 中的适用性。TSA 所用输入特征与3.4 节所述DSA 输入特征类型一致。本文所用特征归一化方法、模型性能评估指标与文献[19]保持一致,故障类型为单点瞬时性三相短路故障,并假设故障清除前后电网拓扑结构不变。
4.1 盲线快速搜索方法的有效性验证
基于TSA 模型评估结果验证盲线快速搜索方法的有效性,同样地,为排除运行方式对验证结果的影响,仅考虑单一运行方式。
全网负荷水平统一调整为110%,故障位置分别设为各线路4%,8%,…,96%处,发电机出力根据负荷水平和出力上下限做出相应改变。故障持续0.25 s 后清除,仿真步长为0.005 s,仿真总时长为3 s。每个故障位置均对应同一个运行方式,因此,输入特征仅包含故障位置电气坐标特征。共生成3 144 个样本,其中包含1 425 个稳定样本和1 719 个失稳样本。选择全部稳定样本和失稳样本组成数据集,并随机选择70%的样本作为训练集、30%的样本作为测试集。由于使用的样本数量少且特征维数低,为避免训练过拟合,本节选择结构简单的神经网络作为机器学习器。
首先,根据2.2 节所提盲线快速搜索方法得到Lblind。然后,基于初始ECS,使用神经网络训练TSA 模型,评估结果如下:评估准确率为97.56%,错误样本数为22,错误样本覆盖率为60%。其中,错误样本数定义为TSA 模型在测试集中预测错误的样本数量,错误样本覆盖率定义为包含盲线的错误样本占总错误样本数量的百分比,此处的盲线是指经过缩减后的Lblind中所包含的盲线。所用神经网络包含两层隐含层,神经元数量为100、50。各条线路在错误样本中出现的次数如附录A 表A1 所示。
盲线对错误样本的覆盖率约为60%,且由附录A 表A1 可知,盲线54-56 和32-40 在错误样本中出现的频次最高。结果表明,所提盲线快速搜索方法能够找出影响TSA 模型精度的主要线路。
4.2 盲区的识别
根据缩减后Lblind所包含的盲线,生成25×25 阶的邻接矩阵A。按照基于邻接矩阵的盲区识别算法,最终得到3 个初始盲区,各初始盲区包含的盲线如表1 所示。根据4.1 节构建的TSA 模型和附录A表A1,对所得初始盲区范围进行微调,新增盲线和微调后盲区对应的实际电网区域如表2 所示。盲区分布如附录A 图A4 所示。

表1 各初始盲区的线路Table 1 Lines in initial blind areas

表2 新增盲线及盲区对应的实际电网区域Table 2 Newly added blind lines and actual power grid areas corresponding to blind areas
4.3 ECS 的参考节点扩展
按照3.3 节所提参考节点扩展方法,搜索得到相应盲区的参考节点。初始ECS 参考节点[19]和各盲区对应的参考节点如表3 所示。在初始参考节点和相应盲区参考节点下,各盲区内的相关性比较如图4 所示。与初始参考节点相比,各盲区在相应参考节点下的故障位置表征精度更高。附录A 图A5进一步展示了在初始参考节点和相应盲区参考节点下,盲区1、2、3 内的相关性散点图。

图4 初始参考节点和相应盲区参考节点的相关性比较Fig.4 Correlation comparison of initial reference nodes and reference nodes in corresponding blind areas

表3 初始和各盲区的参考节点Table 3 Initial reference nodes and reference nodes in each blind area
由图4 和附录A 图A5 可知,针对各盲区选择的各组参考节点,能够准确表征相应盲区内的故障位置。因此,在初始参考节点基础上新增各盲区参考节点,构建包含故障位置信息更丰富的扩展ECS。
4.4 基于扩展ECS 的TSA 精度测试
故障位置分别设置为除发电机节点以外的各母线节点和各条线路的4%,8%,…,96%处。各负荷节点的负荷水平在80%~130%间随机波动,发电机出力根据负荷水平和出力上下限做出相应改变,共生成1 000 种运行方式。针对每个故障位置,分别从1 000 种运行方式中随机抽取30 种运行方式进行时域仿真。故障持续0.25 s 后清除,清除前后电网拓扑结构不变,仿真步长为0.005 s,仿真总时长为3 s。共生成97 020 个样本,其中包括51 455 个稳定样本和45 565 个失稳样本,选择全部样本作为数据集。随机选择数据集中70%的样本作为训练集,30%的样本作为测试集。
由于本节所用样本数量多且特征维数高,结构简单的浅层神经网络学习能力有限,无法准确拟合特征与输出间的映射关系,因此,本节采用学习能力更强的卷积神经网络混合模型[19]作为机器学习模型。模型训练使用小批量优化策略,优化算法为Adam 算法,使用默认的学习率0.001。模型迭代次数设为300 次,每次梯度更新的样本数为200。样本集分为训练集和测试集,使用回调函数技术,自动保存在测试集上评估精度最高的模型。
扩展ECS 共包含30 个参考节点。由附录A 图A4 可知,盲区1、2、3 位于该省级电网单线图的左下方区域,扩展的参考节点也分布在单线图的左下方区域。为准确体现基于扩展ECS 的TSA 方法的优越性,使用卷积神经网络混合模型,分别基于不同的ECS 构建TSA 模型,各模型精度比较结果如表4 所示。其中,ECS-0 表示初始ECS;ECS-1 表示根据文献[19]中的贪心算法,将优化维数增加至30 得到的30 维ECS;ECS-2 表示在初始ECS 基础上新增19个位于电网单线图右上方区域的参考节点,得到的30 维ECS;ECS-3 表示将电网所有节点作为参考节点的全维ECS;E-ECS 表示本文中的扩展ECS。

表4 基于不同ECS 的TSA 精度对比Table 4 Accuracy comparison of TSA based on different ECSs
如表4 所示,基于ECS-3 的TSA 精度略低于E-ECS,表明将所有节点均作为参考节点,并不能显著提高故障位置的特征表达能力。基于E-ECS 的TSA 模型评估精度最高,且与初始ECS 相比评估错误率能够降低约25%,这表明本文所提基于扩展ECS 的TSA 方法能够有效提高安全域概念下的TSA 精度。
为验证本文方法在线应用的可行性,需进一步测试新的待评估故障位置在扩展ECS 下的坐标特征获取耗时以及模型评估耗时。在100%负荷水平下,随机选择10 个母线节点和90 个线路上的位置点作为新的待评估故障位置。获取各故障点在扩展ECS 中的坐标特征,形成100 个待评估样本,并将其输入TSA 模型进行评估。100 个新样本的特征获取和模型评估总耗时为1.715 6 s,平均单个样本耗时为1.7 ms,表明本文方法具备在线应用的可行性。
5 结语
针对初始ECS 对局部区域故障位置表征精度不足的问题,提出了故障位置特征表达的盲区识别与ECS 扩展方法。分析了初始ECS 在局部区域故障位置表征精度不足的原因,定义了盲点、盲线和盲区概念。提出了盲线的判定原理和快速搜索方法,提高了盲线的搜索效率。提出了盲区的识别和微调方法,并通过扩展参考节点,提高了ECS 对盲区的故障位置表征精度。算例表明,所提盲线快速搜索方法能够找出影响TSA 精度的主要线路,基于扩展ECS 构建TSA 模型,能够有效提高安全域概念下的TSA 准确率。
扩展后的ECS 描述对象仍为单点故障位置,不能直接反映电网拓扑结构的变化。对于断线故障等引起的电网拓扑结构改变,可基于本文中的扩展ECS,进一步研究电网拓扑结构的特征表达方法,提高ECS 在DSA 中的适用性。
本文受到山东大学青年学者未来计划(2018WLJH31)资助,特此感谢!
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
中国自行车(2022年6期)2022-10-29
趣味(数学)(2022年4期)2022-07-02
一重技术(2021年5期)2022-01-18
建材发展导向(2021年14期)2021-08-23
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年10期)2021-07-16
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
小雪花·初中高分作文(2019年2期)2019-06-27
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04