
可融合里程计的INS/GNSS组合导航系统设计与试验分析
2022-04-14 06:50崔晓珍周琪武东杰仲训昱
航空科学技术 2022年2期
崔晓珍 周琪 武东杰 仲训昱
摘要:为了解决卫星信号被遮挡环境下MEMS-INS/GNSS组合导航漂移问题,对GNSS信号中断时的MEMS-INS/GNSS系统应如何抑制导航误差的漂移进行了研究。采用基于误差状态的EKF信息融合方法,灵活接入轮式或视觉里程计(OD)的速度约束,建立了一种MEMS-INS/GNSS/OD导航系统。在试验中,对比分析了加入AHRS和里程计信息对导航定位精度的影响。试验结果表明,在GNSS间断环境下,融合里程计能够克服卫星信号中断的影响,在GNSS中断30s时,相较于MEMSINS/GNSS导航系统,定位精度提高了89.70%,且加入AHRS方向约束,能够更好地抑制定位漂移。此外,接入视觉里程计的MEMS-INS/GNSS/OD系统比接入轮式里程计的系统精度提高了16.11%。
关键词:扩展卡尔曼滤波;卫星拒止环境;惯性导航系统;卫星定位系统;组合导航
中图分类号:V249文献标识码:ADOI:10.19452/j.issn1007-5453.2022.02.013
近年来,随着小型无人机、无人车的快速发展和应用,为了降低成本,开发低成本的微机电式惯性导航系统(MEMS-INS)成为研究热点。但是MEMS惯性导航系统存在较大的测量噪声,并且经过积分会产生累计误差。因此,当MEMS惯性导航系统单独使用时,误差会随时间的推移快速增大,可能在数十秒的时间内漂移几十到上百米。为了抑制MEMS-INS误差,常常需要结合其他外部观测量进行约束[1-3]。全球导航卫星系统(GNSS)可以在室外环境中提供全天候、全球参考定位,不存在累積漂移的问题。而且我国一直十分关注卫星导航系统的开发,卫星导航系统的定位精度有所保障[4]。因此,为了提高导航定位的性能,通常将GNSS与INS结合使用[5-9],如INS/GPS、INS/BDS组合导航等。但是在高楼、峡谷、丛林区域等复杂环境下,GNSS卫星信号易被遮挡而出现短时中断,进而导致MEMS-INS/GNSS组合导航的精度受到严重影响。为了抑制GNSS信号中断时MEMS-INS的误差漂移,需要进一步在MEMS-INS/GNSS组合系统中融合其他位姿测量信息,如常用的视觉里程计或轮式里程计等[10-12]。
针对卫星定位信号中断问题,本文对可融合里程计(Odometer,OD)的MEMS-INS、GNSS组合导航系统进行设计和试验分析。主要内容包括:(1)建立基于误差状态扩展卡尔曼滤波的MEMS-INS/GNSS/OD融合定位方法,并加入姿态参考系统(AHRS)方向约束,解决姿态漂移和无绝对方向参考的问题;(2)MEMS-INS/GNSS/ OD融合算法支持接入视觉里程计或接入轮式里程计,既可应用于地面无人车导航定位,又可用于实现无人机的视觉辅助INS/GNSS组合导航。
1组合导航系统框架
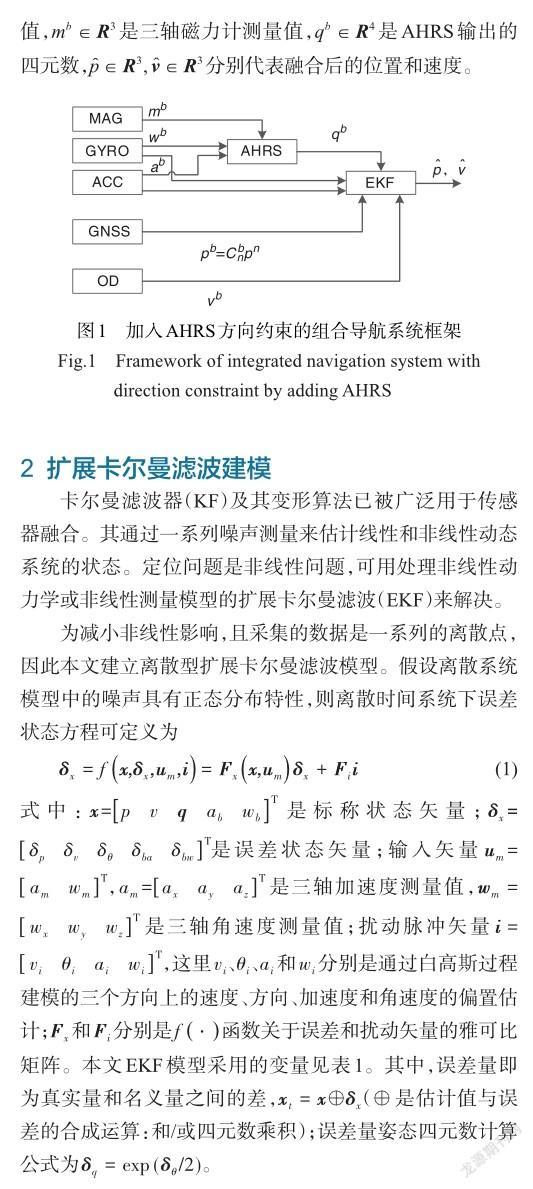
加入AHRS姿态解算的方向约束的MEMS-INS/ GNSS/OD组合导航系统如图1所示,其中EKF作为整个组合导航系统的融合算法,OD为里程计(轮式里程计或视觉里程计),GYRO、ACC分别为MEMS-IMU中的陀螺仪和加速度计,MAG为磁力计。

2.1预测过程
首先,根据IMU数据信息建立预测方程,这里将初始时刻IMU的坐标系(ENU)设置为融合坐标系。当获得其他观测信息后,再进行系统更新。
预测过程负责向前预测当前状态和误差协方差估计,以获得下一步的先验估计。则EKF的预测方程为

3试验结果
3.1试验平台
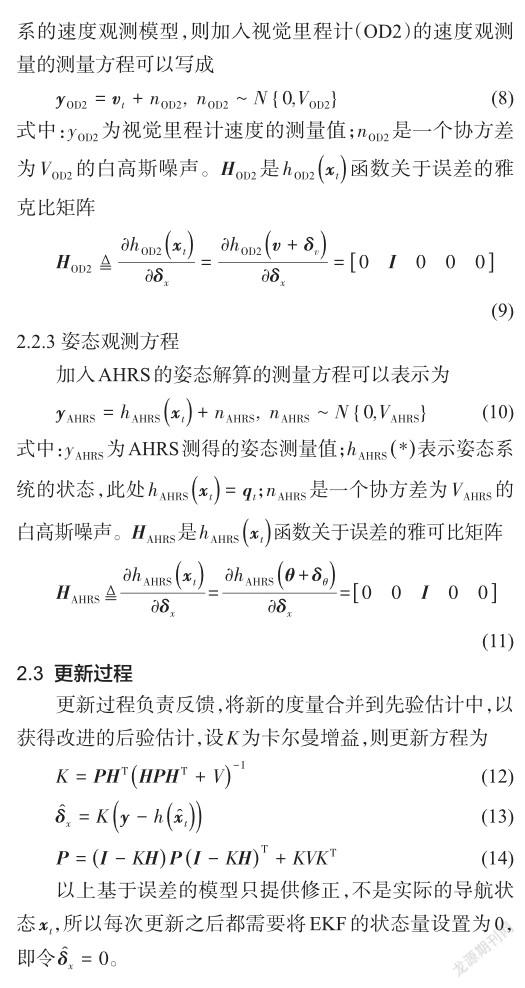
在试验验证中,采用的试验平台是SCOUT四轮无人车,其配置的IMU、GPS、视觉和轮式里程计等传感器如图2所示。计算机为研华工控机ARK-3510L-00A1E,装配Ubuntu和ROS系统。
测试时使用北云科技研制的A1系列板卡,接收频率为5Hz的GNSS测量数据,此数据为单点定位数据,定位精度等级为米级;采用的MEMS惯性导航单元为Xsens MTi-30,用来获取400Hz的加速度和角速度数据。使用的轮式里程计为SCOUT无人车自带的编码器测速传感器;使用 ZED双目相机设计视觉里程计。
为了试验分析,使用千寻位置提供的RTK数据并将其输入司南导航研制的接收机M600mini-G中,获得频率为10Hz的厘米级定位,用作测试的参考值。MEMS-INS/ GNSS组合导航系统采用的器件参数见表2。

3.2实地测试
以无人车在校园围绕建筑行驶一周采集的数据进行测试(起点和终点均在原点处)。测试1:中断GNSS信号30s,分析MEMS-INS/GNSS/OD系统中有无AHRS方向约束对融合定位精度的影响;测试2:中断GNSS信号60s,分析接入视觉里程计或轮式里程计,对有AHRS方向约束的MEMS-INS/GNSS组合导航系统定位精度的影响。
3.2.1测试1试验结果
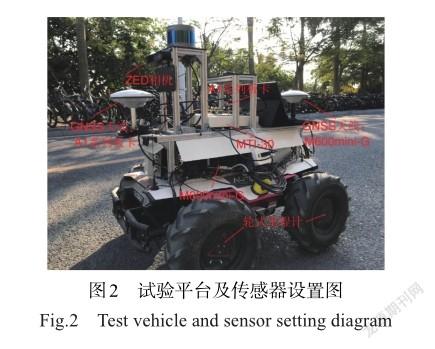
在这个试验中,人为使GNSS信号中断30s,且接入的里程计为轮式里程计,中断路段为图中虚线椭圆标出的区域。图3和图4中绿色实线为参考定位轨迹,蓝色点为既未添加OD速度约束,又未添加AHRS方向约束时的定位轨迹,即MEMS-INS/GNSS系统的定位轨迹;红色实线表示的是未加入AHRS方向约束,只加入轮式里程计速度约束的定位轨迹,即MEMS-INS/GNSS/OD组合导航系统的定位轨迹;黑色实线表示添加AHRS方向约束的MEMS-INS/ GNSS/OD系统的定位轨迹。
图3为MEMS-INS/GNSS系统与MEMS-INS/GNSS/ OD系统的融合定位对比图。通过对比可看出,在MEMSINS/GNSS系统中,GNSS中断会导致整个组合导航系统产生严重的漂移,而加入速度约束的MEMS-INS/GNSS/OD组合导航系统可以抑制位置漂移。图4为未加入AHRS方向约束的MEMS-INS/GNSS/OD系统和加入AHRS方向约束的MEMS-INS/GNSS/OD系统的融合定位对比图。图4的结果显示,在MEMS-INS/GNSS/OD系统中加入AHRS方向约束,能够很好地抑制系统的定位漂移。
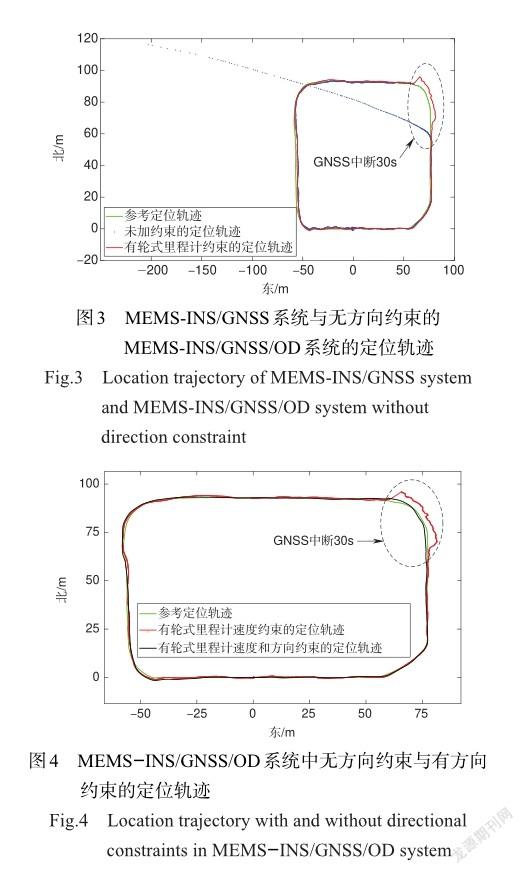
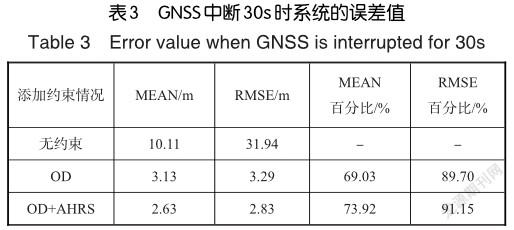
表3的数据表示在GNSS中断30s时,无AHRS约束的MEMS-INS/GNSS系统、无AHRS约束的MEMS-INS/GNSS/ OD系统和有AHRS约束的MEMS-INS/GNSS/OD系统,它们的平均定位误差(MEAN)和均方根误差(RMSE);以及无 AHRS约束的MEMS-INS/GNSS/OD系统和有AHRS约束的MEMS-INS/GNSS/OD系统,分别相较于无约束MEMS-INS/ GNSS系统,定位精度提高的百分比。在GNSS信号中断30s的测试结果中,加入速度约束的MEMS-INS/GNSS/OD系统可以将定位精度提高89.70%,加入AHRS的MEMS-INS/GNSS/ OD系统可以将定位精度提高91.15%,且相较于未加入AHRS的系统更加接近参考定位轨迹。
3.2.2测试2试验结果
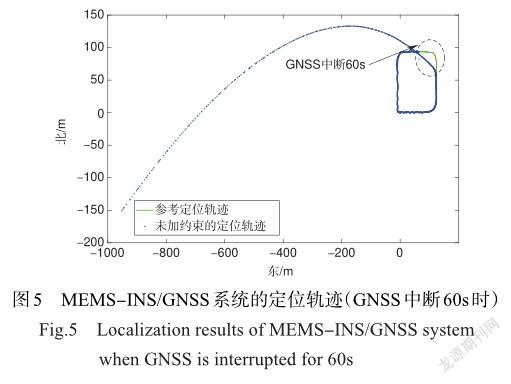
对有加入AHRS的MEMS-INS/GNSS组合导航系统进行测试。如图5所示,绿色实线为参考定位轨迹,蓝色点表示MEMS-INS/GNSS系统在GNSS信号中断60s时的定位轨迹。可以看出,在GNSS信号中断60s时,系统位置漂移近千米。
轮式里程计的精度主要与传感器本身精度相关,具有不需要环境信息的特点。视觉里程计需要环境特征点才能进行计算,因此极易受环境影响。在有加入AHRS的MEMS-INS/GNSS组合导航系统中进一步融合轮式里程计和视觉里程计(速度)信息,分析這两种不同类型的观测信息对导航精度的影响。
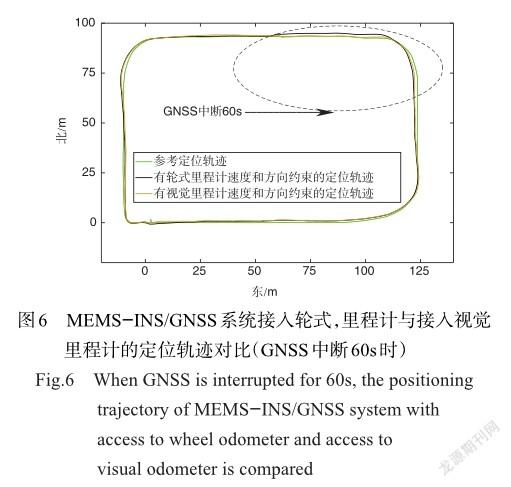
GNSS中断60s,得到的定位轨迹对比结果如图6所示。图中红色实线表示MEMS-INS/GNSS系统接入轮式里程计的定位轨迹,黄色实线表示MEMS-INS/GNSS系统接入视觉
里程计的定位轨迹。可以看出,在既有AHRS进行方向约束又有速度约束的MEMS-INS/GNSS系统中,该速度约束的信息由视觉里程计提供比由轮式里程计提供的定位效果好。
因为轮式里程计只对自身运动情况有感知,提供的速度值只是x轴方向上的速度值,其横向和垂向的速度都被设为0,即轮式里程计使用时假设车辆在道路上正常行驶时满足车辆运动学约束,但实际中存在车辆侧滑的现象并不满足车辆运动学约束,因此在对轮式里程计建模时存在误差;而视觉里程计能够感知自身运动造成的外部环境变化,而且提供的速度信息是三维的,并具有方向性。此外,视觉里程计不受车轮打滑、车辆侧滑等因素影响,相较于轮式里程计测得的速度值更加准确,所以融合后的结果更加接近参考定位轨迹。在GNSS中断60s的测试中,对加入AHRS的MEMS-INS/GNSS/OD系统(即已接入轮式里程计或已接入视觉里程计),分别计算了东、北、天向的MEAN和RMSE,定位误差数据见表4。

计算结果表明,接入视觉里程计的MEMS-INS/GNSS系统比接入轮式里程计的系统在东北天向的精度都有所提高,且接入视觉里程计的系统精度比接入轮式里程计的系统精度提高了16.11%。在GNSS中断60s内,接入轮式里程计系统的最大误差为4.65m(行驶距离的5.21%),接入视觉里程计的系统的最大误差为2.38m(行驶距离的2.74%)。
4结论
本文建立了一种可融入里程计的基于误差状态EKF的MEMS-INS/GNSS组合导航系统。试验结果表明,在MEMS-INS/GNSS中加入里程计的速度值,能够解决GNSS短期中断时,组合导航系统的位置漂移问题。在接入轮式里程计的MEMS-INS/GNSS系统中加入AHRS进行方向约束能够有效提高GNSS信号中断时组合导航系统的定位精度。在都加入AHRS进行方向约束的MEMS-INS/ GNSS/OD系统中,接入视觉里程计的定位效果比接入轮式里程计的定位效果好。下一步将对EKF中的参数进行优化,并在无人机导航中进行应用测试。
参考文献
[1]Li N B,Guan L W,Gao Y B,et al. Indoor and outdoor lowcost seamless integrated navigation system based on the integration of INS/GNSS/LIDAR system[J]. Remote Sensing,2020,12(19):21.
[2]Zuo Z,Yang B,Yue C,et al. Study of simulation platform for BDS/INS/CNS deep integration navigation[J]. Mathematical Problems in Engineering,2020,2020(1):1-11.
[3]Chiang K W,Le D T,Duong T T,et al. The performance analysis of INS/GNSS/V-SLAM integration scheme using smartphone sensors for land vehicle navigation applications in GNSS-challenging environments[J]. Remote Sensing,2020,12(11):19.
[4]丁磊,鐘斌,禹强华,等.北斗三频载波相位组合与相对定位研究[J].航空科学技术, 2018, 29(1):16-24. Ding Lei, Zhong Bin, Yu Qianghua, et al. Research on phase combination and relative positioning of beidou tri-frequency carrier[J]. Aeronautical Science & Technology, 2018, 29(1): 16-24. (in Chinese)
[5]杨兆,沈作军.基于扩展卡尔曼滤波的小型固定翼无人机姿态估计方法分析[J].航空科学技术, 2017, 28(11):15-21.Yang Zhao, Shen Zuojun. Analysis of attitude estimation method for small fixed-wing UAV based on extended Kalman filter[J]. Aeronautical Science & Technology, 2017, 28(11):15-21. ( in Chinese)
[6]Zhang C,Zhao X B,Pang C L,et al. Adaptive fault isolation and system reconfiguration method for GNSS/INS integration[J]. IEEEAccess,2020,8:17121-17133.
[7]Zhou J C,Traugote J,Scherzinger B,et al. A new integration method for MEMS based GNSS/INS multi-sensor systems[C]// Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation(Ion Gnss+ 2015),2015:209-218.
[8]Fu L,Hu C Q,Kong L B. A sea-sky line detection aided GNSS/INS integration method for unmanned surface vehicle navigation[C]// Proceedings of the 30th International Technical Meeting of the Satellite Division of the Institute of Navigation(Ion Gnss+ 2017),2017:1809-1815.
[9]Lefferts E J,Markley F L,Shuster M D. Kalman filtering for spacecraft attitude estimation[J]. Journal of Guidance Control and Dynamics,1982,5(5):417-429.
[10]Reimer C,Muller F J,Hinuber E L V. INS/GNSS/Odometer data fusion in railway applications[C]//2016 DGON Intertial Sensors and Systems(ISS). IEEE,2016.
[11]Ragab M M,Ragab H,Givigi S,et al. Performance evaluation of neural network based integration of vision and motionsensorsforvehicularnavigation[C]//Autonomous Systems:Sensors,Processing and Security for Vehicles & Infrastructure 2019,2019.
[12]肖尧,阮晓钢,朱晓庆,等.一种微型无人机单目视觉SVO/ INS组合导航方法[J].中国惯性技术学报, 2019(2):211-219. Xiao Yao, Ruan Xiaogang, Zhu Xiaoqing, et al.A monocular vision SVO/INS integrated navigation method for miniature unmanned aerial vehicle is proposed[J]. Journal of Chinese Inertial Technology,2019(2):211-219. (in Chinese)
Design and Experimental Analysis of INS/GNSS Integrated Navigation System with Odometer
Cui Xiaozhen1,Zhou Qi2,Wu Dongjie1,Zhong Xunyu1
1. Xiamen University,Xiamen 361102,China
2. AVIC Xi’an Flight Automatic Control Research Institute,Xi’an 710065,China
Abstract: In order to solve the problem of MEMS-INS/GNSS integrated navigation drift in the environment where the satellite signal is blocked, how to suppress the drift of the navigation error when the GNSS signal is interrupted is studied. Using the EKF information fusion method based on the error state and flexibly accessing the velocity constraints of wheel or visual odometer (OD), a MEMS-INS/GNSS/OD navigation system is established. In the experiment, the influence of adding AHRS and odometer information on the accuracy of navigation and positioning is compared and analyzed. The test results show that in the GNSS intermittent environment, the fusion odometer can overcome the influence of the satellite signal interruption. When the GNSS is interrupted for 30s, the positioning accuracy is increased by 89.70% compared with the MEMS-INS/GNSS navigation system, and the AHRS direction constraint can better suppress positioning drift. In addition, the accuracy of the MEMS-INS/GNSS/OD system using the visual odometer is improved by 16.11% than that of the wheeled odometer.
Key Words: extended Kalman filter; satellite-jamming environment; INS; satellite positioning system; integrated navigation
Received: 2021-07-15;Revised: 2021-09-19;Accepted: 2021-11-18 Foundation item: Aeronautical Science Foundation of China (201908068003)
