
面向航天器零部件装配的机械臂混合控制策略
2022-04-14 06:50王剑李成刚岳云双储亚东钱鸿巍李檬
航空科学技术 2022年2期
王剑 李成刚 岳云双 储亚东 钱鸿巍 李檬
摘要:航天器零部件具有多品种、小批量的特点,自动化装配难以保证高精度的位置控制和柔顺的接触力控制。为充分发挥人的知识决策和机器人的力量精度优势,本文提出了一种基于阻抗和导纳控制的加权混合控制策略,采用加权平均的方法,根据环境刚度以及期望性能调节阻抗控制和导纳控制的相对权重,协调阻抗和导纳控制的混合控制效果。试验表明,混合控制算法控制性能良好,运动过程平稳,振荡幅度仅为阻抗控制的33%、导纳控制的80%;达到稳定状态的调节时间短,稳定时长仅为导纳控制的75%、导纳控制的90%。该控制策略融合了两种控制方法的优点,适应性强,在不同的刚度环境下都具备良好的柔顺性。
关键词:航天器零部件;柔顺装配;阻抗导纳;加权平均;混合控制
中图分类号:V465文献标识码:ADOI:10.19452/j.issn1007-5453.2022.02.014
航天器(空间探测器、空间站等)的零部件装配具有部件质量和尺寸大、装配空间狭小、作业环境复杂等特点,且通常不成批量。因此,国内航天器零部件的装配多以人工装配为主,产品装配的质量、精度及可靠性、装配周期依赖于装配工人的经验。随着新型航天装备在装配精度、研制周期等方面的要求不断提高,当前这种效率低下的生产方式显然已经很难适应未来的发展趋势[1]。
近年来,随着智能制造技术的发展,越来越多的专家学者开始关注并研究智能制造在航天器零部件装配制造中的应用。冯志刚等[2]利用机器视觉技术开发了一套工业机器人定位系统,可用于航天零部件的装配定位和胶结部件的加压保压作业。吕玉江等[3]基于AGV的智能调度系统在航空总装车间搭建了全自动化的物料配送系统。史肖飞等[4]基于面向装配的模块划分技术、MBD设计技术和模块成熟度技术,提出了民用飞机设计制造一体化设计,用以解决现有飞机研制中设计与制造分离的问题。国内外针对机械臂在航天装备中的应用也开展了广泛的研究[5-7],美国国家航空航天局(NASA)利用工业机器人先后完成了大尺寸舱板、空间站舱门的安装,以及在轨加注和在轨装配等模拟试验;库卡公司(KUKA)和AKEO公司共同开发的Saphir机器人实现了通信卫星有效载荷内嵌板的自动化安装[8]。
主动柔顺控制技术可以使得机械臂在任务执行的过程中与环境进行接触和交互,能够表现出足够的柔顺性来实现柔顺装配和人机协作,这对航天器零部件的装配具有重要价值,常见的控制方法有阻抗控制和力/位置混合控制。Chan等[9]采用力矩阻抗控制策略实现机器人装配,根据位置和速度的反馈调节关节力矩,以维持机器人末端的阻抗关系。芦俊等[10]提出了一种基于自适应阻抗控制的装配方法,它能根据机器人末端的受力情况,按照自适应律修正期望位置,使轴始终朝着阻力减小的方向运动,完成轴孔装配任务。力/位置混合控制方法多与智能控制方法相结合。Jean等[11]将自学习方法运用到力/位置混合控制中,Tao等[12]将神经网络用于力/位置混合控制的实时训练,研究了机器人力/位混合控制的鲁棒性。胡瑞钦等[13]提出了一套基于力/位混合控制的机器人柔顺装配方案,用以解决航天器大部件装配中存在的界面分离问题。
在一般的阻抗模型中,采用固定的阻抗控制参数无法适应装配环境的变化。为此,自适应阻抗控制被提出并被广泛研究。自适应阻抗控制可以实现机器人与环境的稳定接触,控制性能较好,但也并非是最优的解决方案,仍存在一些问题,如只适用恒定或缓慢变化的环境。
针对上述问题,本文提出了一种结合阻抗和导纳控制的混合控制算法,阻抗控制在高刚度环境中控制性能良好,而导纳控制在低刚度环境中可靠,混合控制兼具两者的特性,可快速调整并适应环境的变化。为了验证该算法的有效性,利用实验室自主设计搭建的机器人平台进行了环境接触试验。
1机械臂动力学建模

2混合控制器设计
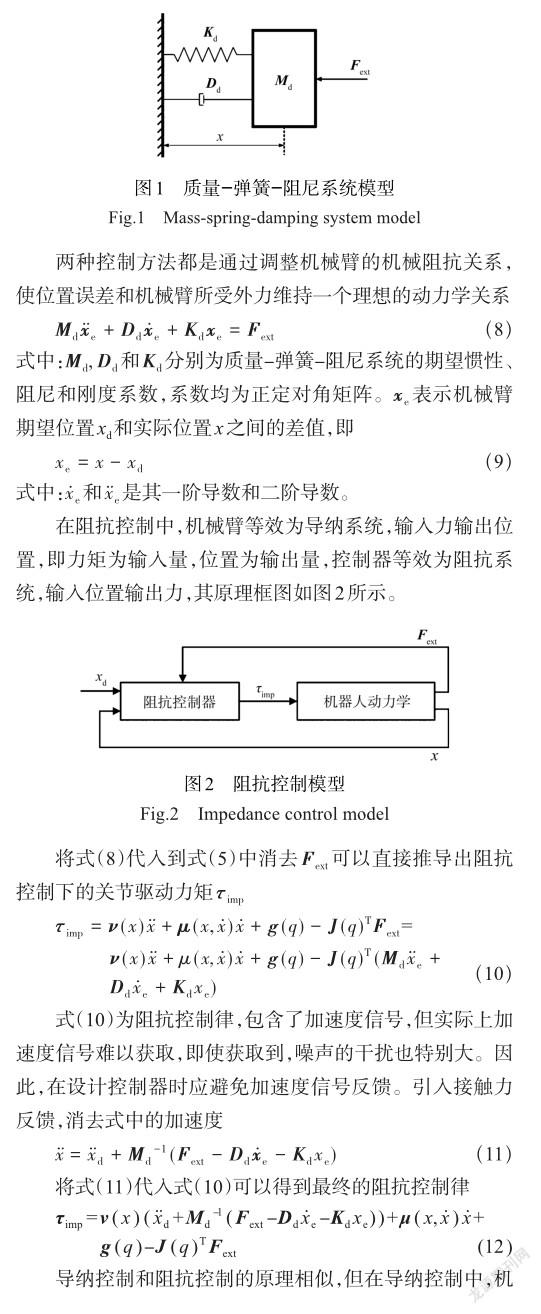
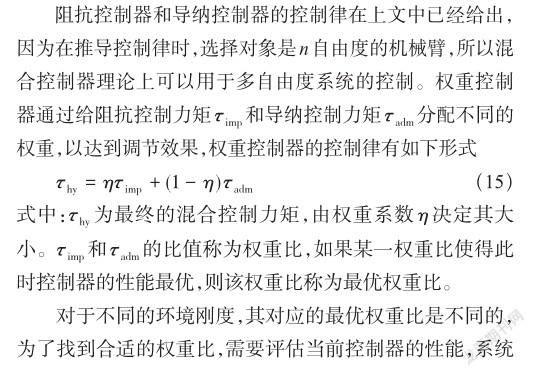
混合控制器主要包括阻抗控制器和导纳控制器两部分,阻抗模型和导纳模型均可由质量-弹簧-阻尼系统来描述,如图1所示。

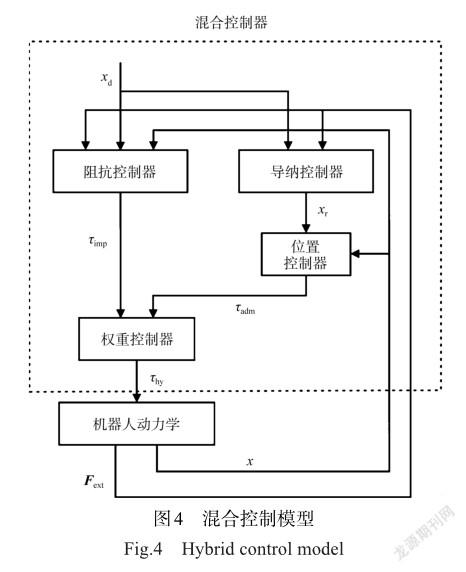
阻抗控制在高剛度环境中柔顺性能良好,但在低刚度环境中位置精度较差,而导纳控制在低刚度环境下性能可靠,高刚度环境中可能不稳定。需要特别指出的是,在本文中高刚度与低刚度并无绝对界定,在不同场景下甚至同一场景的不同阻抗参数条件下,适宜的刚度值都不同。环境刚度的高低取决于使用阻抗或导纳控制算法时所表现的性能。为了使系统适应环境刚度的变化,本文基于开关切换混合控制理论[15],提出了基于加权平均方法的阻抗导纳混合控制算法,如图4所示。

需要特别指出的是,该自适应律可为最优权重比的选择提供一个大致的区间范围和趋势预测,但不应作为最终结果。如需确定最优权重比的确定值,科学合理的方法是在相应区间范围内多次测量,对应最小评价函数数值的权重比即为当前环境刚度下的最优权重比。
3接触试验
在航天器零部件的柔顺装配中,为了保证安装精度和装配过程的安全性,需要对机械臂进行精准的接触力控制。因此,利用实验室自主设计搭建的机器人平台,模拟航天器零部件的装配场景,设计了接触试验,研究混合控制算法下机械臂末端的受力情况。
如图5所示,试验平台的主体包括一个三自由度机械臂,由伺服电机驱动关节运动,各关节均安装有角度编码器,可测得关节连杆角度。关节内部安装有力矩传感器,可测得关节所受外力矩,具体参数见表1。
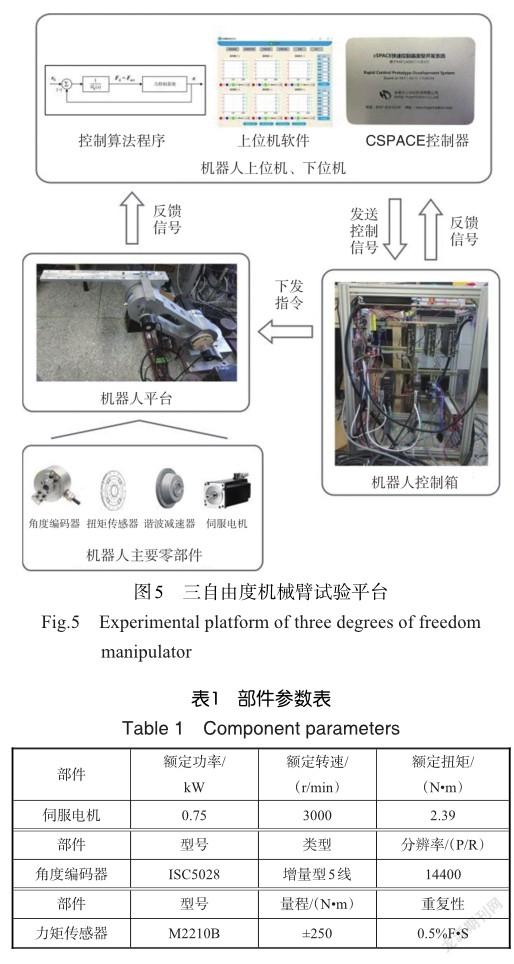
下位机采用CSAPCE控制器,采样周期最小为5ms,可下载搭建好的控制算法程序,下发指令,实现对机械臂的控制。此控制器还提供配套的上位机软件,可与控制器进行通信,并实时监测反馈数据。
3.1相同环境刚度下的环境接触试验
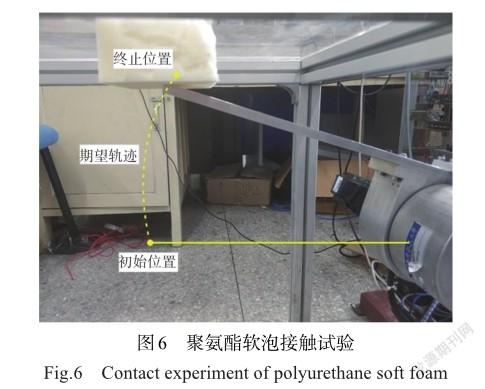
接触试验在单关节条件下进行,相较于多关节条件,在不影响试验结论准确性的前提下,简化了试验步骤,缩短了试验时间。如图6所示,接触材料为聚氨酯软泡,其材料刚度系数低,仅为36N/mm,因此变形效果明显,不同控制方法之间的对比大。试验中,将接触材料置于机械臂上方恰当位置,机械臂从水平角度按照给定的控制算法和给定的期望轨迹运动,直至与材料接触,并达到稳定状态。

机械臂的动力学模型参数为:m=15kg,d=0.3m,I= 1.5kg?m2。经过测试,阻抗控制参数设计为Md=15kg,Dd= 50N?s/m,Kd=5000N/m;导纳控制参数设计为Md=15kg,Dd= 50N?s/m,Kd=100N/m,kp=104N/m,kv=20N?s/m时,控制性能较好,混合控制的权重系数初步设计为0.5:0.5(导纳控制:阻抗控制)。图7为不同控制算法下,关节角度随时间的变化曲线。从图中可以看出,阻抗控制下,关节抖动剧烈,运行不平稳,偏离期望轨迹的振荡幅度达±0.6°;导纳控制达到稳定状态的调节时间长,稳定时长为6s;混合控制运动过程平稳,振荡幅度仅为±0.2°,同时在4.5s内便能达到稳定状态,调节时间缩短。还可以观察到,在期望角度相同的条件下,不同控制算法关节角度最终的稳定值也不同。角度越大,压入深度越大,如图8所示。

从图8中可以看出,阻抗控制压入深度最大,为15.6mm;混合控制压入深度为7.4mm;导纳控制压入深度最小,为2.8mm。
图9展示了各控制算法下,关节运动过程中所受外力矩的变化曲线,其中阻抗控制压入深度最大,因此环境对关节施加的外力矩也最大,混合控制和导纳控制依次减小。

3.2不同环境刚度下混合控制权重的选择
在航空零部件的柔顺装配中,机械臂的力控制至关重要。接触力过大,可能会破坏工件表面甚至是损坏零部件;接触力过小,则无法提供足够的力完成装配任务。采用混合控制策略,可以根据不同的装配任务或环境刚度,调节相对权重,改变末端接触力,使机械臂提供的驱动力不至于过大,又可以辅助操作人员较为轻松地完成装配任务。
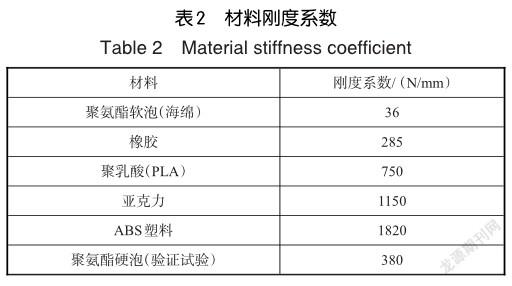
不同的环境刚度对应的最优权重比是不同的,试验中给定的权重比只是初值,并非最优值。在混合控制算法下,机械臂分别与聚氨酯软泡、橡胶、聚乳酸、亚克力板和ABS塑料进行接触(刚度系数见表2),试验得到不同环境刚度下的最优权重比。

其均方误差为0.015903,拟合程度良好,可以近似地认为最优权重比与环境刚度是线性相关的。

为验证结论,选择聚氨酯硬泡进行了验证试验,其刚度系数为380N/mm,试验得到最优权重比为0.25,并进行线性回归分析。如图11所示,聚氨酯硬泡对应的离散点位于拟合直线95%的置信区间内,表明线性相关的置信水平不低于95%,可以认定该点不是异常点,因此验证了最优权重比与环境刚度线性相关这一结论的合理性。

4结论
本文提出了一种基于阻抗导纳混合控制算法的柔顺装配策略,并通过一系列接触试验得到了以下结论:
(1)相较于单纯的阻抗控制或导纳控制,混合控制算法结合了两者的优点,具有更强的适应性,柔顺性能更好。
(2)混合控制算法控制性能良好,运动过程平稳,振荡幅度仅为阻抗控制的33%,导纳控制的80%;达到稳定状态的调节时间仅为导纳控制的75%,阻抗控制的90%。
(3)大量試验得到的规律表明:最优权重比与环境刚度线性相关,随着刚度的增加,最优权重比也在增加。
参考文献
[1]黎田,胡晓雪,姚为,等.机器人在航天装备自动化装配中的应用研究[J].航空制造技术,2014(21):102-104,108. Li Tian, Hu Xiaoxue, Yao Wei, et al. Research on application of robot in automatic assembly of aerospace equipment[J]. Aeronautical Manufacturing Technology, 2014 (21): 102-104,108.(in Chinese)
[2]冯志刚,李泷杲,熊天辰,等.工业机器人视觉定位系统的实现[J].航空科学技术, 2018, 29(6):52-57. Feng Zhigang, Li Longgao, Xiong Tianchen, et al. Implementation of industrial robot visual position system[J]. Aeronautical Science & Technology, 2018, 29(6):52-57. (in Chinese)
[3]吕玉江,孟召军,杨伟,等.AGV关键技术在航空制造车间的应用展望[J].航空科学技术,2021,32(7):1-11. Lyu Yujiang, Meng Zhaojun, Yang Wei, et al. Application prospect of AGV key technology in aviation manufacturing workshop[J]. Aeronautical Science & Technology, 2021,32 (7): 1-11.(in Chinese)
[4]史肖飞,王辉.面向装配的民用飞机设计制造一体化应用研究[J].航空科学技术,2021,32(2):56-61. Shi Xiaofei, Wang Hui. Application research on integration of civil aircraft design and manufacturing for assembly[J]. Aeronautical Science & Technology, 2021,32(2): 56-61.(in Chinese)
[5]张立建,胡瑞钦,易旺民.基于六维力传感器的工业机器人末端负载受力感知研究[J].自动化学报,2017,43(3):439-447. Zhang Lijian, Hu Ruiqin, Yi Wangmin. Research on end load force sensing of industrial robot based on six dimensional force sensor[J]. Journal of Automation, 2017, 43(3): 439-447. (in Chinese)
[6]张建中,何永义,李军.机器人装配视觉定位应用研究[J].机电工程,2011,28(8):934-937. Zhang Jianzhong, He Yongyi, Li Jun. Application research of robot assembly vision positioning[J]. Mechanical and Electrical Engineering, 2011,28(8): 934-937.(in Chinese)
[7]劉仁伟,徐晓辉,谢永权,等.基于机械臂辅助的卫星柔顺装配技术研究[J].机电工程,2020,37(5):532-536. Liu Renwei, Xu Xiaohui, Xie Yongquan, et al. Research on satellite compliant assembly technology based on manipulator[J]. Mechanical and Electrical Engineering, 2020,37(5): 532-536.(in Chinese)
[8]易旺民,隆昌宇,胡瑞钦.面向航天器装配测试的机器人系统及应用(上)[J].中国航天,2019(2):30-33. Yi Wangmin, Long Changyu, Hu Ruiqin. Robot system and application for spacecraft assembly test (Part 1) [J]. China Aerospace, 2019(2): 30-33.(in Chinese)
[9]Chan S P,Liaw H C. Generalized impedance control of robot for assembly tasks requiring compliant manipulation[J]. IEEE Transactions on Industrial Electronics,2002,43(4):453-461.
[10]芦俊,颜景平,陈俊杰.基于自适应阻抗控制的轴孔装配方法[J].控制理论与应用,2003(1):85-88. Lu Jun, Yan Jingping, Chen Junjie. Shaft hole assembly method based on adaptive impedance control[J]. Control Theory andApplication, 2003(1): 85-88. (in Chinese)
[11]Jean J H,Fu C.Adaptive hybrid control strategies for constrained robots[J].IEEE Transactions on Automatic Control,1993,38(4):598-603.
[12]Tao J M,Lu H J. Application of neural network with real-time training to robust position/force control of multiple robots[C]// IEEE International Conference on Robotics & Automation. IEEE,1993.
[13]胡瑞欽,张立建,孟少华,等.基于柔顺控制的航天器大部件机器人装配技术[J].机械工程学报, 2018, 54(11):85-93. Hu Ruiqin, Zhang Lijian, Meng Shaohua, et al. Robot assembly technology of spacecraft large parts based on compliance control[J]. Journal of Mechanical Engineering, 2018, 54(11): 85-93.(in Chinese)
[14]仇鑫,尤晶晶,叶鹏达,等.一种新型可重构Stewart衍生型并联机器人的奇异位形及工作空间[J].机械设计,2021,38(6): 30-40. Qiu Xin, You Jingjing, Ye Pengda, et al. Singular configuration and workspace of a new reconfigurable Stewart derived parallel robot[J]. Mechanical Design, 2021, 38(6): 30-40. (in Chinese)
[15]Ott C,Mukherjee R,Nakamura Y. A hybrid system framework for unified impedance and admittance control[J]. Journal of Intelligent & Robotic Systems,2015,78(3-4):359-375.
Hybrid Control Strategy of Manipulator for Spacecraft Component Assembly
Wang Jian,Li Chenggang,Yue Yunshuang,Chu Yadong,Qian Hongwei,Li Meng Nanjing University of Aeronautics & Astronautics,Nanjing 210016,China
Abstract: Spacecraft parts have the characteristics of variety and small batch. It is difficult to ensure high-precision position control and flexible contact force control in automatic assembly. In order to give full play to the advantages of human knowledge decision-making and robot power precision, a weighted hybrid control strategy based on impedance and admittance control is proposed. The weighted average method is used to adjust the relative weight of impedance control and admittance control according to the environmental stiffness and expected performance so as to coordinate the hybrid control effect of impedance and admittance control. Experiments show that the hybrid control algorithm has good control performance and stable motion process. The oscillation amplitude is only 33% of impedance control and 80% of admittance control. The adjustment time to reach the stable state is short, and the stable time is only 75% of the admittance control and 90% of the admittance control. With the advantages of the two control methods, the control strategy has strong adaptability and good compliance in different stiffness environments.
Key Words: spacecraft components; flexible assembly; impedance admittance; weighted average; hybrid control
Received: 2021-06-21;Revised: 2021-10-18;Accepted: 2021-11-25
Foundation item: Aeronautical Science Foundation of China (201916052001); Nanjing University of Aeronautics and Astronautics Open Fund (kfjj20200515)
