基于VR技术的风景园林环境层次规划设计
2022-04-14 07:13郭小曼
许昌学院学报 2022年2期
郭小曼
(合肥滨湖职业技术学院 建筑工程与设计学院,安徽 合肥 230601)
在计算机图像处理环境下进行风景园林环境层次规划设计能够提高规划艺术的表达能力和视觉传达能力,在城市空间规划建设等方面具有重要意义[1].芮潇等[2]基于群智优化路径技术,通过创建园林应用环境图,采用Dijkstra最短路径算法和群体智能优化算法对Dijkstra最短路径算法对园林道路规划进行改进,虽然规划效率较好,但视觉表达效果仍有待提高.王巧良等[3]提出城市公园的设计应融入环保理念,步道旅游线路应满足环境的教育功能,但存在模糊度较大、层次辨识能力较差等缺点.基于此,为了有效提高风景园林环境层次规划,提出基于VR技术的风景园林环境层次规划设计方法,采用联合结构相似性特征分析风景园林图像特征,结合虚拟现实的特征结构重组和增强技术,实现对风景园林环境层次规划优化设计.
1 风景园林环境层次规划视觉采样和特征分析
1.1 风景园林环境层次规划视觉采样
为了实现基于VR技术的风景园林环境层次规划设计,采用虚拟现实成像技术实现对风景园林环境层次规划的视觉图像采集,风景园林环境层次规划结构模型如图1所示.
图1 风景园林环境层次规划结构
根据风景园林环境层次规划结构,采用空间区域特征匹配方法,进行风景园林环境层次规划和特征分析,提取风景园林环境层次参数,将区域像素融合后得到风景园林环境层次规划的统计特征量.将环境层次规划艺术图像的信息增强处理后,计算风景园林环境层次规划的相关特征分布集,就得到风景园林环境层次规划的三维区域重构为
(1)

(2)
式中,H(φ)为联合结构相似性分块Heaviside函数,δ(z)是提取风景园林环境层次规划的类信息损失特征分量.
1.2 风景园林环境层次特征分析
采用联合结构相似性特征分析方法,实现对风景园林环境层次规划的结构像素特征分析,得到景园林环境层次融合的空间匹配特征集[5].在Dropout层和批归一化层,得到风景园林环境层次规划的虚拟视觉图像I(x,y)在成像区域的仿射不变参数,用雅克比矩阵J(x,y,σ)表示,得到风景园林环境层次规划虚拟视觉融合的特征分割矩阵为
J(x,y,σ)=I(x,y)+W+H(x,y,σ).
(3)
采用多任务学习的参数融合方法,得到风景园林环境层次规划的二阶灰度矩阵H(x,y,σ),风景园林环境层次规划虚拟视觉图像的灰度像素,为
rm=J(x,y,σ)+[f(v)+H(x,y,σ)],
(4)
式中,f(v)为多种监督学习方法参数.通过对图像尺度进行分割,得到风景园林环境层次规划虚拟视觉图像的特征分割模型[6],特征分割的中心矩M表示为
M=f(v)+‖F+G‖+rm.
(5)
通过降采样操作,得到风景园林环境层次规划的虚拟视觉图像的边缘像素集为F,灰度图像为G.采用度量学习的方法,得到风景园林环境层次规划的自相关特征分量为

(6)
式中,q(x)为风景园林环境层次规划的虚拟视觉图像特征提取结果输出,σ为风景园林环境层次规划的联合多个监督信息损伤参数.因此,为了实现对风景园林环境层次规划的结构像素特征分析,根据风景园林环境多样性的图片结构特征分布,并结合虚拟现实的特征结构重组和增强技术来实现风景园林规划的优化设计.
2 风景园林环境层次规划设计优化
2.1 风景园林环境层次规划虚拟现实重构
采用虚拟现实重构技术,得到风景园林环境层次规划虚拟的视觉图像的边缘轮廓特征检测模型,并结合虚拟现实的特征结构重组和增强技术,对风景园林环境层次规划过程中的层次进行优化控制和寻优[7].为了构建风景园林环境层次规划虚拟视觉图像的角点分布模型,风景园林环境层次规划的相似度特征量满足
f=Km+Ab(k)+q(x),
(7)
式中,Km表示风景园林环境层次规划的网格分块轨迹.对风景园林环境层次规划特征量进行模糊融合,得到风景园林环境层次分布图像I(x,y)中的灰度像素序列

(8)
将X,Y,Z三维边缘像素特征分量映射到X1,Y1,Z1中,得到风景园林环境层次规划的虚拟重构结果,风景园林环境层次的视觉图像S大小为H×L.采用红外和射频横向扫描技术进行风景园林环境层次规划,得到模糊搜索次数为Qs(r).使用粗糙集特征匹配方法,实现风景园林环境层次规划的虚拟视觉重组,输出的联合关联约束特征量为
y(w)=‖df(k)+dfi,j(k)‖+T,
(9)
式中,df(k)和dfi,j(k)分别是风景园林环境层次规划虚拟视觉图像的差异度系数.因此,为了实现风景园林环境层次规划的艺术特征表达,采用深度学习方法,对风景园林环境层次进行规划设计.
2.2 风景园林环境层次规划实现
采用联合度量和多层次融合方法,对风景园林环境层次规划进行优化设计,得到风景园林环境层次分布的纹理结构特征量为

(10)
式中,OV为自适应纹理渲染参数,OP为风景园林环境层次规划的边缘轮廓的小波域系数,在信息中心vi得到风景园林环境层次规划的视觉差.
采用视觉偏移修正方法,得到风景园林环境层次规划的色差补偿函数为

(11)
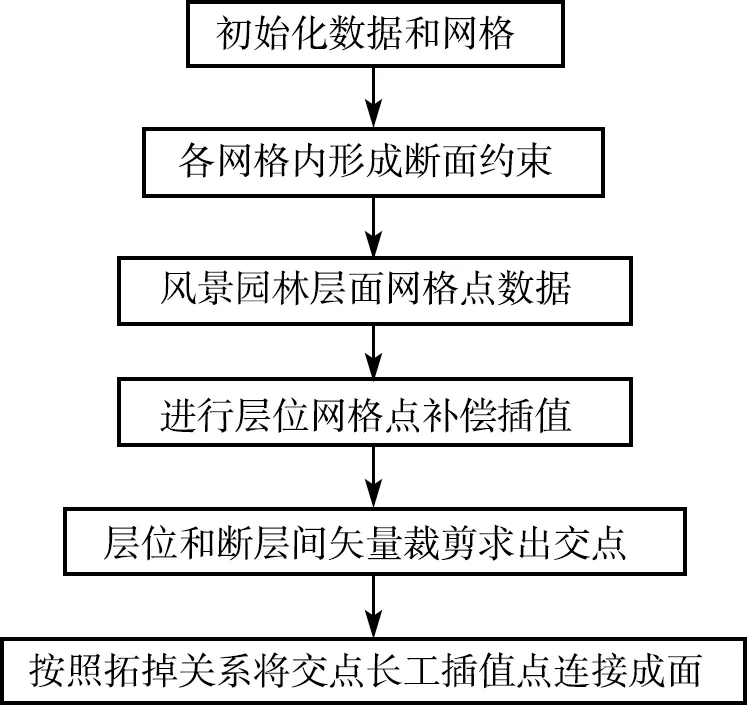
图2 风景园林环境层次规划设计的流程
式中,n=1,2,…,T,表示风景园林环境层次规划虚拟视觉图像的色差修正迭代步数,u(n)(x,y,d)表示风景园林环境层次规划虚拟视觉图像融合的自相关特征匹配集[8].
采用Gabor小波变换获取风景园林环境层次规划虚拟视觉图像的模糊隶属度特征集u={uik},在多层像素分布结构区域[9],得到风景园林环境层次纹理结构,可以用公式(12)表示为

(12)

综上分析,采用虚拟现实重构技术,能够实现对风景园林环境层次规划设计,结构流程如图2所示.
3 仿真实验与结果分析
3.1 仿真实验
为了验证该方法在实现风景园林环境层次规划设计中的应用性能,需要进行实验测试分析.风景园林环境层次规划拟视觉采样的像素强度为200 dB,图像虚拟现实增强的最大迭代尺度Gmax=30,风景园林环境层次的分布维数D=12,特征分布的压缩比ICR=64×8/10=51.2.根据上述参数设定,采用Vega Prime实现的环境效果模拟,在Multigen Creator建模下实现风景园林环境层次规划的三维视觉重构,得到视景仿真界面,如图3所示.在该视景仿真界面中,还需要采用虚拟现实重构技术对风景园林环境进行层次融合处理.
在“合肥市风景园林景观规划设计”项目中,构建社区广场的设计样本,场景的主要三维对象分别为草地、绿化带植物和宽阔地带.应用VR技术得到风景园林环境层次规划设计,如图4所示.经过分析可以看出,采用该方法能够优化风景园林环境层次规划设计,并有效提高风景园林环境层次规划的虚拟现实重构能力.
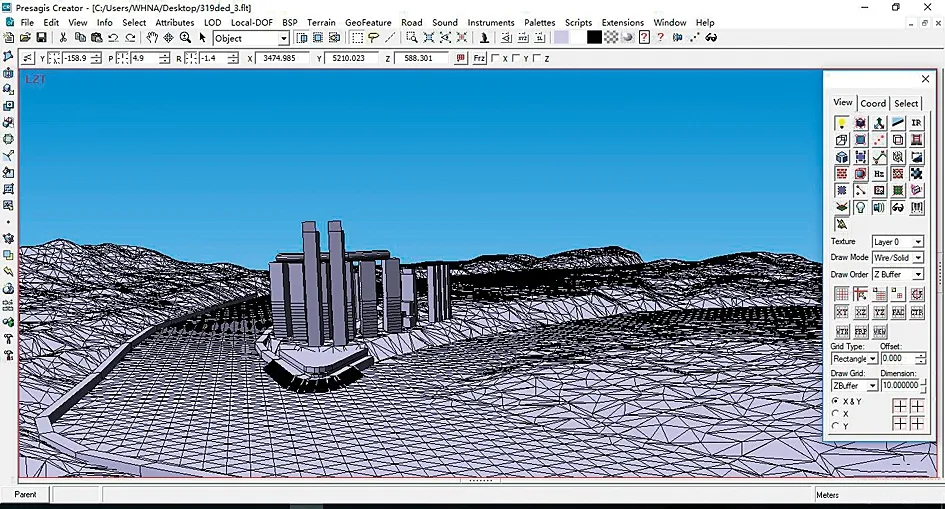
图3 风景园林环境层次规划的视景仿真界面
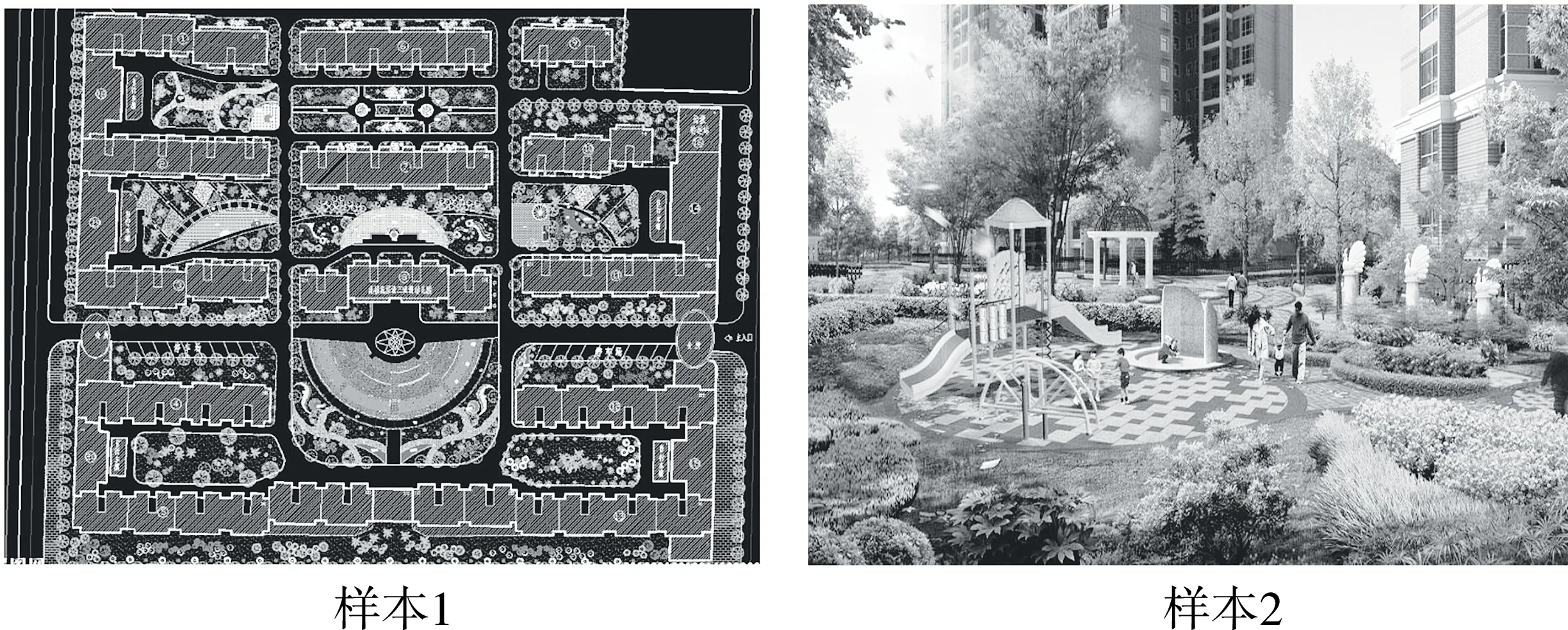
图4 风景园林环境层次规划设计样本

图5 风景园林环境层次规划 的色差敏感度测试对比
3.2 结果分析
为了验证VR技术的有效性,与文献[2]、[3]方法进行对比,测试不同方法对风景园林环境层次规划设计的色差敏感度,如图5所示.可以看出,文献[2]方法的色彩敏感度平均值为65%,文献[3]方法为60%,仿真实验所提方法为80%.经过对比可以看出,所提方法规划的风景园林环境的色彩敏感度较好,设计的融合度水平较高.所提方法采用VR技术的特征结构重组和增强技术能够获取风景园林环境的结构特征分布,而且联合度量和多层次融合方法联用还能够实现风景园林环境的层次规划,并有效提升风景园林环境重构的视觉表达效果.
4 结语
基于VR技术的风景园林环境层次规划设计方法能够提高风景园林环境层次规划设计的三维重构能力及视觉效果.根据风景园林环境多样性的图片结构特征分布,结合虚拟现实的特征结构重组和增强技术,采用联合度量和多层次融合等多种方法,对风景园林环境层次规划优化设计.仿真结果表明,使用该方法进行风景园林环境层次规划设计的三维重构能力较好,而且视觉表达效果较强,能够有效提高规划和设计效果.
在研究过程中,所提方法未考虑风景园林环境规划的时长,在风景园林环境层次规划效率方面仍有提升空间.未来研究应该从提升规划效率的角度出发,进一步完善基于VR技术的风景园林环境层次规划方法.
猜你喜欢
住区(2022年6期)2022-02-15
甘肃教育(2020年4期)2020-09-11
中华建设(2019年6期)2019-07-19
现代园艺(2018年2期)2018-03-15
现代园艺(2018年2期)2018-03-15
现代园艺(2018年3期)2018-02-10
现代园艺(2017年13期)2018-01-19
商周刊(2017年24期)2017-02-02
中国工程咨询(2017年3期)2017-01-31
海外星云(2016年7期)2016-12-01