基于模糊PID算法的自动控制研究
2022-04-19 21:43何昕雷
粘接 2022年3期
何昕雷



摘 要:针对溶解氧浓度控制存在响应速度低和工艺能耗高等问题,结合模糊PID算法,提出将溶解氧浓度控制转化为对鼓风机电机转速的控制,并采用模糊规则对鼓风机电机转速进行精确控制的方法。仿真结果表明,构建的模糊PID控制器达到系统设定的溶解氧浓度值仅需75 s,与传统的PID算法相比,缩短了45 s;在实际应用中,通过模糊PID控制的溶解氧浓度能保持稳定,维持在2.5 mg/L左右,具有一定的有效性。
关键词:模糊PID;污水处理;溶解氧浓度;自动控制
中图分类号:TP392
文献标识码:A文章编号:1001-5922(2022)03-0177-05
Research on automatic control based on fuzzy PID algorithm
HE Xinlei
(Jinshan College, Fujian Agriculture and Forestry University, Fuzhou 741020,China)
Abstract:Aiming at the problems of low response speed and high process energy consumption in dissolved oxygen concentration control, combined with fuzzy PID algorithm, a method is proposed to convert dissolved oxygen concentration control into blower motor speed control, and fuzzy rules are used to accurately control blower motor speed. The simulation results show that it takes only 75 s for the fuzzy PID controller to reach the dissolved oxygen concentration set by the system, which is 45 s shorter than the traditional PID algorithm; In practical application, the dissolved oxygen concentration controlled by fuzzy PID can remain stable at about 2.5 mg/L, which is effective.
Key words:fuzzy PID; sewage treatment; dissolved oxygen concentration; automatic control
随着工业化的高速发展,水污染已成为一个不容忽视的严峻问题。为改善水质,采用间歇式活性污泥法对污水进行处理成为当前的主要方式。作为现代化工污水处理的主要方法,其具有效率高的优势;但只能根据设定的时间程序对污水进行机械化处理,往往达不到理想的控制效果[1]。有学者通过将实时测量溶解氧浓度与设定值差值,采用PID控制器进行动态调整,实现了污水处理中溶解氧浓度的智能控制[2];为克服污水处理中的扰动和不确定性,结合PID控制器与有限时间控制,提出一种改进型有限时间自抗扰控制器,实现了溶解氧浓度的实时调控[3],为现代化工污水处理提供了一种新思路。上述方法虽取得一定成果,但在实际污水处理过程中,由于溶解氧浓度随时间变化较大,且与检测时间存在一定的滞后情况,因此传统PID控制效果仍达不到理想效果。为解决该问题,本研究尝试利用溶解氧浓度的模糊PID方法,以实现对参数的动态调节。
1 基本算法
1.1 PID控制简介
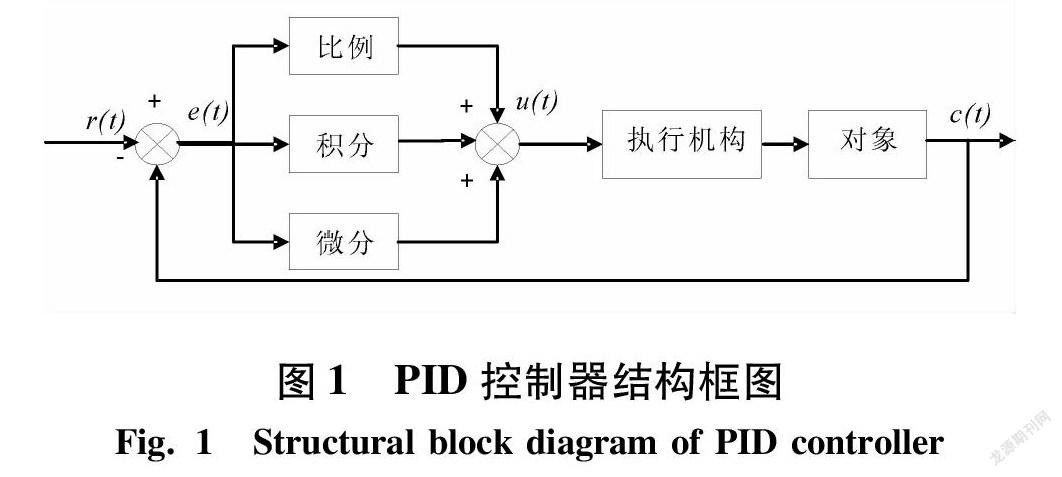
PID控制是一种自动化控制方式,具有结构简单、鲁棒性强的特点,基本结构如图1所示。
PID控制器的数学描述[4-5]:
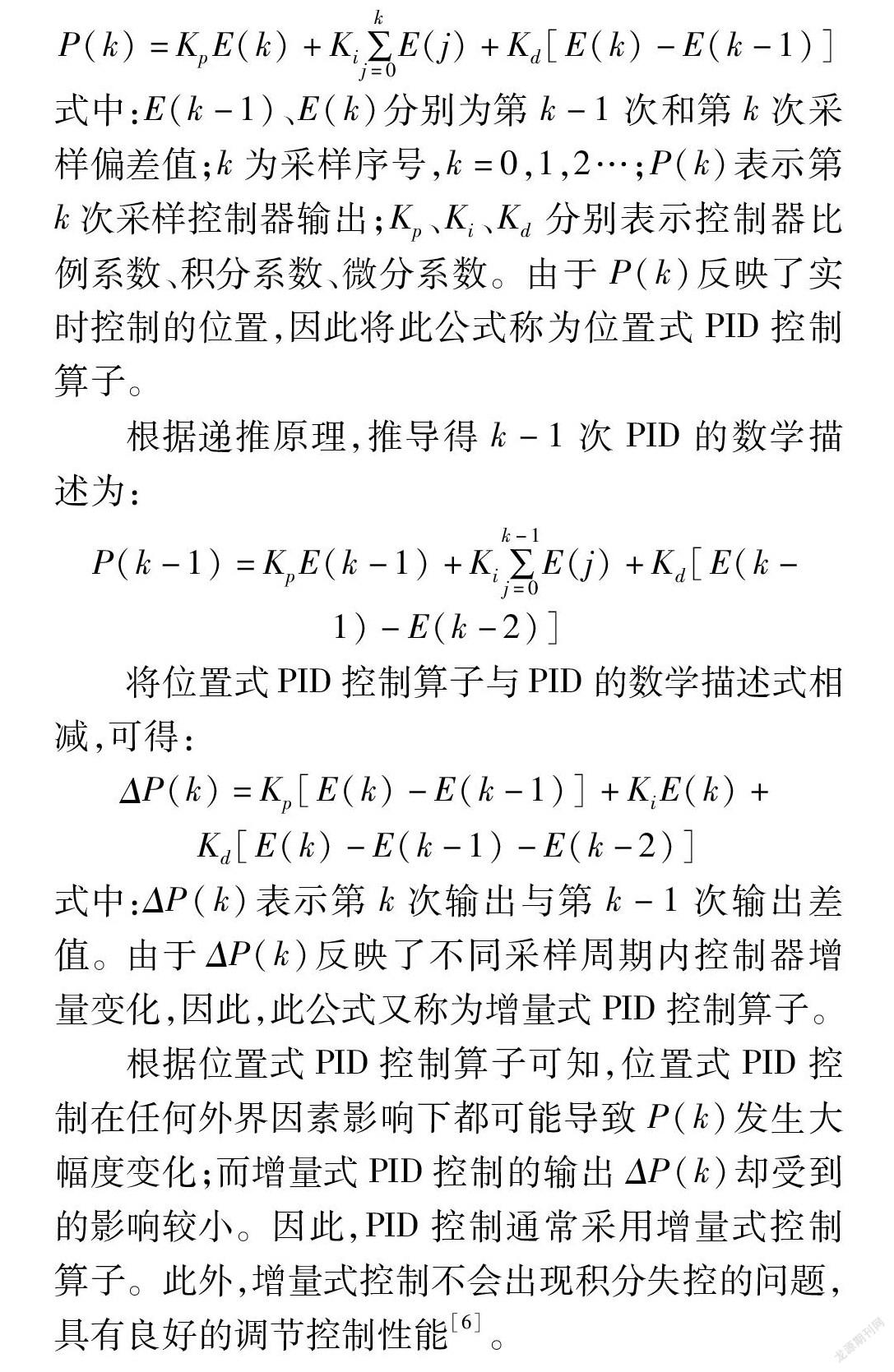
P(k)=KpE(k)+Ki∑kj=0E(j)+Kd[E(k)-E(k-1)]
式中:E(k-1)、E(k)分别为第k-1次和第k次采样偏差值;k为采样序号,k=0,1,2…;
P(k)表示第k次采样控制器输出;Kp、Ki、Kd分别表示控制器比例系数、积分系数、微分系数。由于P(k)反映了实时控制的位置,因此将此公式称为位置式PID控制算子。
根据递推原理,推导得k-1次PID的数学描述为:
P(k-1)=KpE(k-1)+Ki∑k-1j=0E(j)+Kd[E(k-
1)-E(k-2)]
將位置式PID控制算子与PID的数学描述式相减,可得:
ΔP(k)=Kp[E(k)-E(k-1)]+KiE(k)+
Kd[E(k)-E(k-1)-E(k-2)]
式中:ΔP(k)表示第k次输出与第k-1次输出差值。由于ΔP(k)反映了不同采样周期内控制器增量变化,因此,此公式又称为增量式PID控制算子。
根据位置式PID控制算子可知,位置式PID控制在任何外界因素影响下都可能导致P(k)发生大幅度变化;而增量式PID控制的输出ΔP(k)却受到的影响较小。因此,PID控制通常采用增量式控制算子。此外,增量式控制不会出现积分失控的问题,具有良好的调节控制性能[6]。
1.2 模糊控制简介
模糊控制的基本原理是根据模糊集合理论,将带有模糊性描述的控制策略或规律转化为模糊数学表达,然后根据推理运算得出控制量进行控制[7]。图2为模糊控制器结构框图,整个控制过程主要包括模糊化、推理运算、清晰化。
模糊控制具有鲁棒性强、适应度高、速度快、易操作的特点,可有效解决PID控制中比例、积分、微分参数整定难度大的问题[8-9]。本文根据间歇式活性污泥法处理污水中的溶解氧,并采用模糊PID进行自动控制。
2 基于模糊PID的污水处理溶解氧浓度自动控制
2.1 控制方案设计
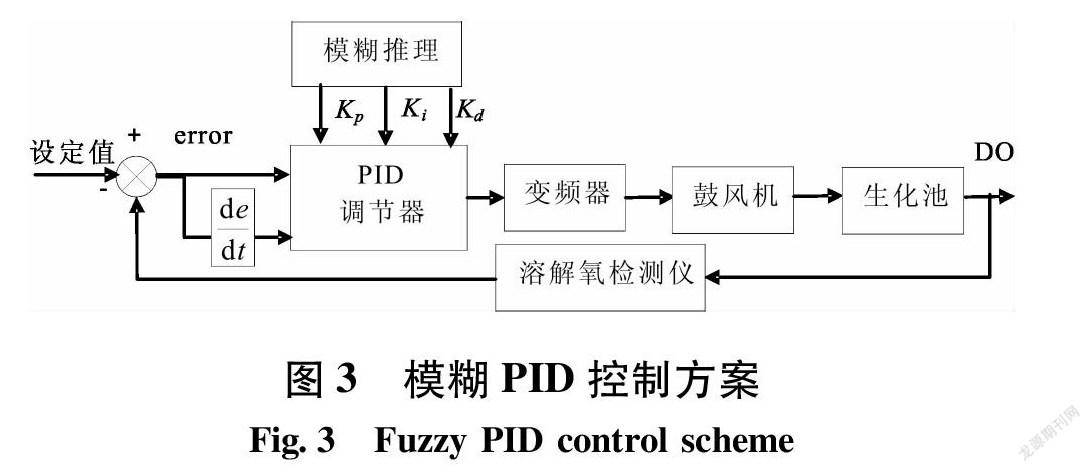
PID控制虽然控制原理简单且容易实现,但也存在比例、积分、微分参数整定难度大的问题,导致实际应用中PID控制效果不理想[10]。为解决该问题,本文结合PID控制与模糊控制,对PID控制器进行了改进。模糊PID控制器的原理是通过建立PID参数Kp、Ki、Kd与溶解氧浓度偏差e及其变化率ec的模糊关系,这种模式关系是在一定模糊规则上对Kp、Ki、Kd进行实时调整,以满足不同溶解氧浓度处理的要求。在间歇式活性污泥法污水处理中,由于水中的溶解氧来自鼓风机的空气输入,而鼓风机空气输入量的大小与鼓风机转速相关;因此,可将溶解氧浓度控制转化为对鼓风机转速的控制[11]。通过采用溶解氧检测仪检测水中溶解氧,然后采用模糊PID控制器调整鼓风机电机转速,即可实现对水中溶解氧的控制。因此,基于上述分析,将模糊PID对污水处理中溶解氧的控制方案设计为如图3所示的模糊控制方案。
由图3可知,其中,模糊PID控制器的输入变量为溶解氧浓度偏差e及其变化率ec;偏差e为采样周期内检测的溶解氧值与设定值的差值;偏差变化率ec为et与et-1的差值;输出变量为鼓风机电机转速控制信号。
2.2 精确量模糊化及隶属度函数确定
精确量模糊化是构建模糊规则,实现模糊推理的前提条件。根据文献[12]、文献[13]可知,溶解氧浓度与设定浓度的差值在±2.5 mg/L,因此将浓度差分为极小、极大、小、大、较小、较大、适中7个等级,记为{NB,PB,NM,PM,NS,PS,ZO}。
隶属度函数即通过函数定义实现精确量模糊化。目前,常用的隶属度函数包括高斯隶属度函数、三角形隶属度函数、S形隶属度函数等[14]。本文根据污水处理中溶解氧浓度变化特点,采用高斯隶属度函数对边界NB与PB浓度进行模糊化;采用三角形隶属度函数对其他浓度进行模糊化。其中模糊PID参数Kp、Ki、Kd的模糊化过程如图4所示。
由图4可知,当Kp=-0.1时,NS隶属度为1;当NM和ZO的隶属度为0.5时,NB、PS、PM、PB隶属度为0,说明隶属度函数实现了精确量的模糊化。通过以上方法,可获得模糊集合{NB,PB,NM,PM,NS,PS,ZO}的隶属度。
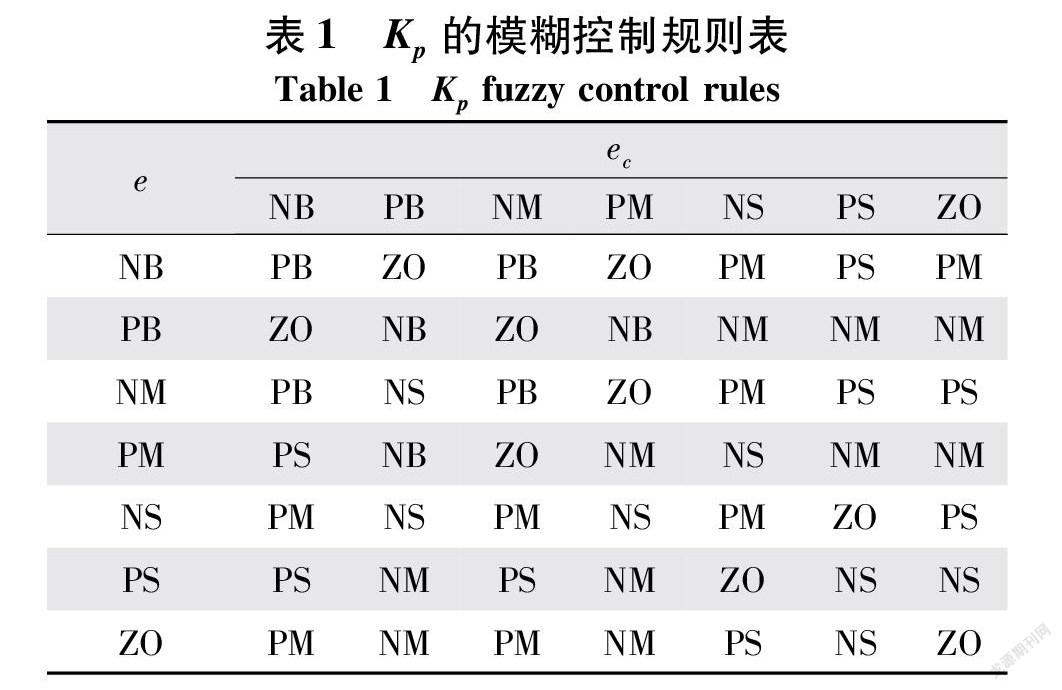
2.3 模糊控制规则
模糊控制的核心是设计模糊控制规则。间歇式活性污泥法处理污水的逻辑关系是构建溶解氧与有机物降解的平衡关系;而该平衡关系是通过Kp、Ki、Kd之间相互作用的结果。因此,以Kp参数为例,设计模糊控制规则,具体如表1所示[15]。
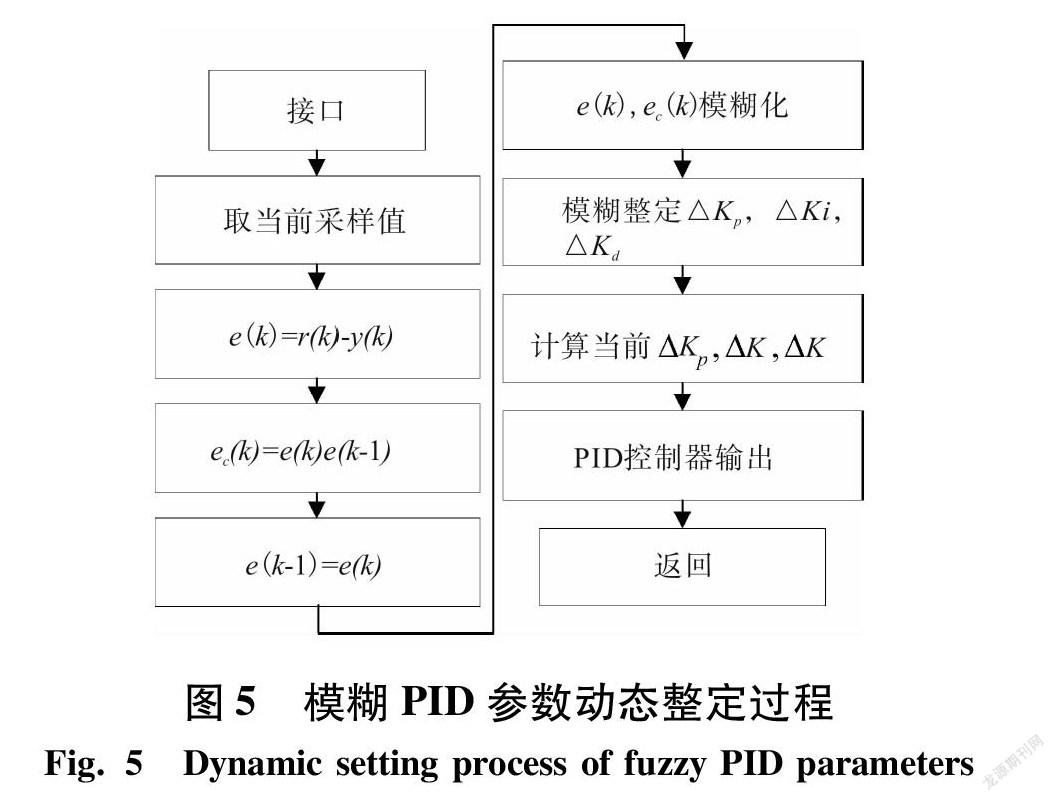
2.4 PID参数动态整定
根据模糊控制规则对模糊逻辑的运算,即实现Kp、Ki、Kd参数动态调整。PID参数动态整定流程如图5。
设K′p 、K′i 、K′d 为Kp、Ki、Kd通过PID控制整定得到的参数,对其进行模糊化和去模糊化,即可得到模糊PID参数:
Kp = K′p + ΔKp
Ki = K′i + ΔKi
Kd = K′d + ΔKd
式中:ΔKp、ΔKi、ΔKd为模糊PID调节量。
3 仿真实验
3.1 实验环境搭建
本次实验在MATLAB7.0软件中构建模糊PID控制器,在FIS编辑器和模糊规则编辑器与隶属度函数编辑器上设定相应参数。系统在64位Windows7操作系统上运行,硬件配置inter Pentium2.0处理器,硬盘640 G,内存512 MB。
3.2 溶解氧浓度数学模型选取
溶解氧浓度是影响污水处理效果,衡量出水品质的重要指标。本文以溶解氧浓度作为控制目标构建数学模型。标准状态下,间歇式活性污泥法污水处理生化池中的溶解氧质量浓度为0[9]。标准大气压下,设置前向通道稳态增益为Kc=7.796 8,时间常数为Tc=2 480S,溶解氧与检测滞后时间为20 s,并对生化池中溶解氧传递过程的前向通道进行阶跃测试,得到水中溶解氧质量浓度为2.5 mg/L。因此,可将溶解氧传递过程前向通道过程函数用数学描述:
Gc(S)=7.796 82 480S+1e-20S
式中:S表示溶解氧的输入参数;Gc(S)表示溶解氧传递过程前向通道过程函数;e-20S在这里表示延迟20 s。
根据溶解氧浓度参考模型,可将溶解氧预估模型描述:
Gy(S)=KcT0S+1e-20S
式中:Kc=7.796 8表示控制對象放大倍数;T0表示预估模型时间常数,取值为Tc的1/30~1/40,通过计算可知T0取值范围为[63S,84S]。本文结合间歇式活性污泥法污水处理实际情况,将T0设置为72S[10]。
本研究的溶解氧预估数学模型定义为:
Gy(S)=7.796 870S+1
在以上数学模型基础上,结合模糊PID控制算法,利用MATLAB构建仿真图。
3.3 结果与分析
3.2.1 方法验证
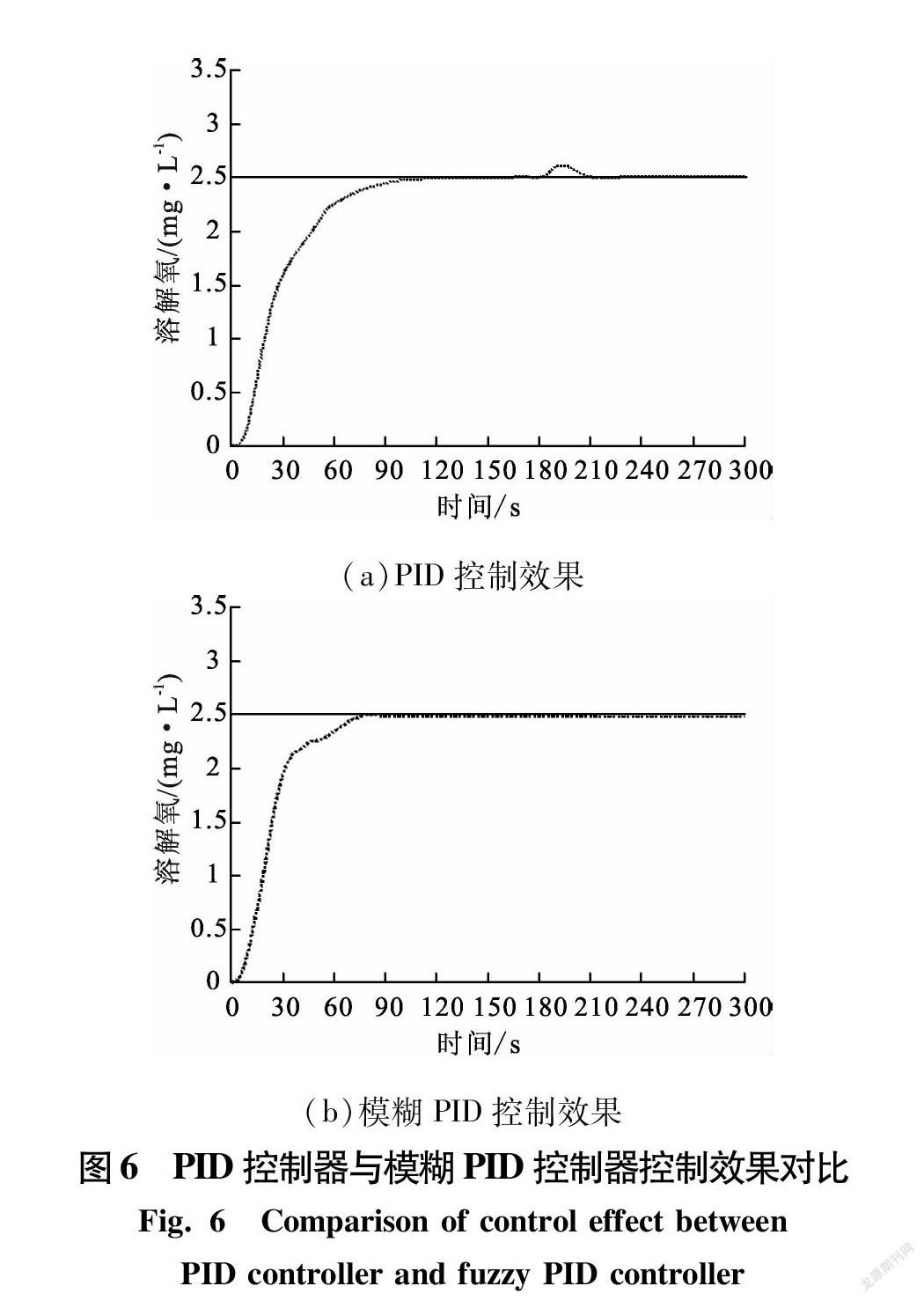
为验证所提控制方法的有效性,对比PID与模糊PID对污水处理中溶解氧的自动控制效果,具体结果如图6所示。
由图6可知,基于标准的PID控制设计的控制器,在120 s时达到系统设定的溶解氧值2.5 mg/L;在180~210 s时出现了超调量波动的现象。基于模糊PID设计的控制器在75 s时达到了系统设定的溶解氧值,相较于基于标准PID设计的控制器,所需时间缩短了45 s,且达到系统设定值后,控制效果保持稳定,未出现超调量。由此说明,所设计的基于模糊PID的污水处理溶解氧值自动控制方法,具有响应迅速和稳态性高的优势。
3.3.2 实例验证
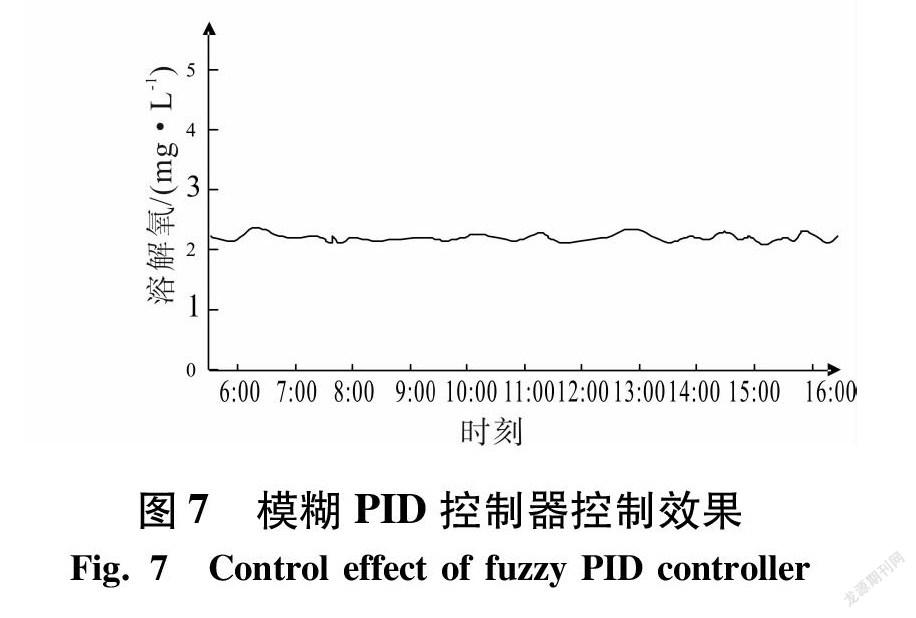
为进一步验证所提方法的有效性,将设计的基于模糊PID控制器对某化工污水处理厂鼓风机电机进行控制,得到控制后水中溶解氧浓度曲线,结果如图7所示。
由图7可知,所设计的模糊PID控制器能有效控制水中溶解氧质量浓度维持在2.5 mg/L左右,且整个控制过程较为稳定,具有一定的有效性。
4 结语
综上所述,所设计的基于模糊PID算法的自动控制器可实现溶解氧浓度的自动控制。相较于传统PID控制器,本研究的方法达到设定值的控制时间更短,且控制效果保持稳定,未出现超调量,具有响应迅速、稳态性良好的优势,可用于实际污水处理中溶解氧浓度控制。但本研究仍存在一些有待解决的问题,如在模糊规则制定上主要依据经验知识,未考虑真实工况下复杂环境等因素的影响。因此,下一步将尝试结合专家经验知识与实际工况,构建模糊规则。
【参考文献】
[1]
杜胜利,张庆达,曹博琦,等. 城市污水处理过程模型预测控制研究综述[J]. 信息与控制,2022,51(1):41-53.
[2] 崔心惠,李文萱,詹玉新. 面向污水处理溶解氧浓度的智能优化控制[J]. 滁州职业技术学院学报,2021,20(3):57-62.
[3] 魏伟,张莹莹,刘载文,等. 污水处理过程溶解氧浓度的有限时间抗扰控制[J]. 计算机仿真,2021,38(6):204-209.
[4] 王爱其,陈科. 自适应粒子群算法在污水处理过程智能控制优化中的应用仿真研究[J]. 中国造纸,2021,40(8):70-74.
[5] 阳启航,李家春,陈跃威,等. 模糊控制技术在磷矿废水处理系统中的应用[J]. 净水技术,2022,41(2):81-86.
[6] 趙岩,周秦源,邵念锋,等. 基于RBF神经网络模糊PID控制的电液伺服系统[J]. 机电工程,2022,39(2):244-249.
[7] 杨阳,王鹏江,吉晓冬,等. 基于模糊数学的掘进机截割头转速分档预测方法[J]. 煤炭工程,2022,54(2):172-176.
[8] 白雪宁,宁煜,穆龙涛. PLC的化工污水处理自动化控制系统设计[J]. 粘接,2021,48(12):146-150.
[9] 王思远,孙言锴,宁伟,等. 铅锌选矿废水处理自控系统设计及应用[J]. 有色金属(选矿部分),2021(5):124-130.
[10] 曾春霞,董宗哲,何涛. 模糊代数PID控制在污水处理溶解氧控制系统的应用[J]. 化工自动化及仪表,2021,48(6):528-534.
[11] 王维. 微电解氧化还原破络技术在污水处理中的应用[J]. 粘接,2021,45(1):39-42.
猜你喜欢
消费电子(2022年7期)2022-10-31
中国应急管理科学(2022年2期)2022-05-23
中国科学探险(2021年4期)2021-10-02
科学与财富(2021年34期)2021-05-10
科学家(2021年24期)2021-04-25
环境与发展(2020年10期)2020-12-14
旅游纵览·行业版(2017年2期)2017-03-25
学苑创造·C版(2016年10期)2016-11-19
科技视界(2016年22期)2016-10-18
科技视界(2016年21期)2016-10-17