
多功能六轴机器人机械手臂采摘设计
2022-04-20 04:03夏明
科教创新与实践 2022年6期
关键词:结构设计
摘要:水果采摘费用高且劳动量大,为了快速且准确完成苹果采摘任务,需要进行水果采摘机械人结构设计。首先进行采摘机械机构选型,确定合适自由度;其次,依据典型果树轮廓确定采摘臂结构尺寸,绘制采摘机械手臂零件图和装配图;最后,搭建采摘机械人结构试验台,进行实体运动和抓取实验对设计效果进行验证。
关键词:六轴;采摘机械手臂;结构设计
采摘机器人手臂的控制问题是当今农业控制领域的研究热点。针对果实在树上分布范围广、位置随机、自动识别受枝叶遮挡影响的特点,美国、荷兰、日本等进行了较深入的研究,但机器人采摘作业受环境影响可靠性较低的问题仍未得到很好的解决,且机械手臂稳定性较低,易出现采摘率低,树枝、果实损伤等问题。我国在果疏采摘机器人方面也有研究, 其研究成果已在草莓和番茄收获机器人上得到初步应用,而对于既包含大范围整体运动, 又包含小范围振动的苹果采摘机器人手臂系统,国内外少有文献报道,仅分析了环境变量对苹果机械手臂位置控制的影响。机械手臂在采摘过程中的稳定性问题,是当前亟待解决的难点。
1、系统简介
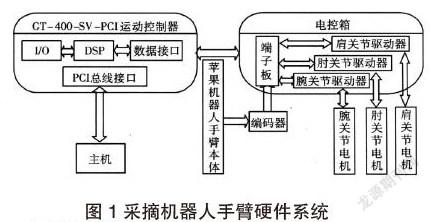
本研究设计的苹果采摘机器人手臂硬件系统,主要由机器人手臂本体、控制系统、伺服驱动系统、检测系统及外围电路组成如图1所示。其中机器人手臂本体由上臂、前臂、手和肩、肘、腕各关节驱动器及其电机构成;控制系统的核心器件采用深圳固高公司生产的GT-400-SV-PCI运动控制器和I/O端子板,是主机和机器人手臂本体之间联系的桥梁;检测系统以及外围电路主要由增量式编码器和限位开关组成。[1]
2、机械人机构选型及自由度的确定
由于采摘机械人的作业对象是苹果,质量轻,体积小,故而可选择较为简单、灵活、紧凑的结构形式。根据机械人手臂的动作形态,按坐标形式大致可将机械人手臂部分分为以下四类:直角坐标型机械手;圆柱坐标型机械手;球坐标(极坐标)型机械手;多关节型机械手。采摘机械臂的结构型式选取主要取决于机械人的活动范围、灵活性、重复定位精度、持重能力和控制难易等要求。以上四种型式,它们的活动范围和灵活度逐渐增大。经过对苹果采摘空间的研究,结果表明,苹果树树冠和底部的苹果分布极少,大多分布在树冠中部,大约有80%以上的苹果分布在距地面垂直高度 1-2m、距树干左右方向1-2m的空间范围内,且阴阳两面的苹果分布率并无明显的差异。[2]这就要求采摘机械手应当具有较大的工作空间,因此选用多关节型机械手较为合适,且其占地面积较小,更加适合苹果采摘作业。
3、采摘机械臂工作原理
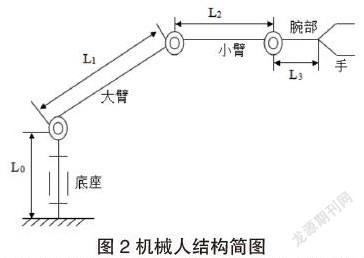
图2是本次设计的球类水果采摘机械人的结构简图。该结构为六自由度机构,可划分为底座、大臂、小臂、腕部和手五个部分。[3]机械臂的底座通过舵机带动传动系统实现各个部分之间的相对转动和旋转。其中的各个转动和旋转均是通过电机驱动螺旋丝杆来实现。该设计机械臂的传动如下:(1)底座旋转。确定与底座平面互相垂直的目标采摘物所在的平面。(2)大臂转动。移动至目标采摘位置附近的上方或下方。(3)小臂转动。将采摘机械手送至目标采摘物的附近。(4)手腕转动及旋转。调整机械手末端采摘机构的姿态,使其处于一个合适的位置,保证采摘任务能够合理完成。(5)手夹紧放松,完成对目标采摘物的采摘任务。此外,将末端执行器设计为关节型的两只手指,通過舵机、齿轮的啮合及连杆机构实现对目标采摘物的夹紧与放松。
由以上分析得出:机械手的空间位姿由各个关节的空间坐标来决定,即当机械手的各个舵机的坐标确定的时候,就可以确定机械手的空间位姿。而决定舵机坐标的因素就是臂长及臂的转动角度,而在这两个参数中,设计结束后臂长是确定的常量,角度为变量。在模型当中,舵机1、2 的相对位置固定不变,控制末端执行器的舵机 6 用来调整手的姿态,因此可以先忽略舵机 1、6,将舵机2轴线中心的位置设为坐标系原点。
4、结束语
本研究应用拉格朗日方程建立了苹果机器人手臂动力学模型,将苹果采摘机器人手臂的整个运动空间划分为伸展区和采摘区。为保证苹果机器人手臂在伸展过程中能量不断增加,提出了一种基于能量的伸展控制策略,有效地解决了机器人手臂到达采摘区的稳定性控制问题。计算机模拟结果表明:利用 LQ R 控制策略使得机器人手臂的大臂、前臂和机械手在采摘区达到稳定的时间 ≤2 s,验证了该控制策略的有效性。进一步,还需在理论上针对该系统的鲁棒性能进行分析研究,以确保控制策略的可靠性。
参考文献:
[1] 汤修映,张铁中.果蔬收获机器人研究综述[J].机器人,2005.
[2] 钟宁帆,孙敏慧, 邹云.奇异摄动系统的 H ∞控制:基于奇异系统的方法[J] .控制理论与应用, 2007.
[3] 邹湘军,金双,陈燕,等.基于Modelica的采摘机械手运动控制与建模[J].系统仿真学报,2009.
作者简介:夏明(1996.05-),山东交通学院本科学生,指导老师:李光。
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
交通科技与管理(2022年8期)2022-05-07
理科爱好者(教育教学版)(2022年2期)2022-05-05
汽车实用技术(2022年7期)2022-04-20
科学与财富(2021年36期)2021-05-10
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
神州·上旬刊(2017年9期)2017-10-15
科学与财富(2017年20期)2017-07-10
建筑建材装饰(2016年6期)2016-10-14
