基于Synchro仿真的城市干道交通信号协调控制优化
2022-04-20 08:47封宗荣
公路交通科技 2022年3期
刘 澜,封宗荣
(1.西南交通大学 交通运输与物流学院,四川 成都 610031;2.综合交通运输智能化国家地方联合工程实验室,四川 成都 610031;3.西南交通大学 唐山研究生院,河北 唐山 063000)
0 引言
进入21世纪以后,世界经济发展突飞猛进,城市规模不断壮大,机动车的保有量迅速增加。据公安部统计,截止到2020年9月份,全国机动车保有量高达3.65亿辆。居民交通出行需求量骤增,交通时空资源难以与交通需求的增长相适应,导致交通拥堵问题日益严重,交通拥挤呈现从偶发性向常态性发展的趋势。干线是城市道路网络结构的骨架,是城市内部交通大动脉。承担城市大量交通压力,兼具通行速度快、通行能力大等优点。双向城市交通干道协调联动控制是缓解城市交通拥堵,提高城市干道交通效率的主要途径之一。
关于干道交通协调联动控制方面的研究,国内外已有较成熟技术。LV S J等[1]将遗传反向传播神经网络算法与传统分析算法相结合,提出一种新的动态干道协调联动控制策略,提高了传统算法的稳定性和控制精度,并且实现干道协调控制参数的动态调整。YAN J Q等[2]针对传统图解法没有采用任何寻求最优解的方法,提出了一种随机最优图解法的双向绿波控制方法,根据道路双向交通通行能力的不同,建立带宽分配系数公式,合理分配绿波带宽。郜轶敏、张存保等[3]以车均延误与排队长度为优化目标,建立考虑可变导向车道的干道协调联动控制信号配时优化模型。
马亚峰、刘澜[4]充分考虑干道上多个瓶颈交叉口拥堵以及支路竞争相位的信号控制问题,绿波带与红波带协调控制相结合,充分利用上游交叉口的截留能力和下游交叉口的卸载能力,缓解拥堵交叉口交通压力。龙科军、高志波等[5]在车路协同环境下,通过车联网下干线信号协调联动控制以及车辆速度主动引导方法,解决基于车辆到达被动响应型控制问题。WEI M等[6]通过分析车辆从上游向下游行驶的分散特性,提出一种基于车队离散理论的干线绿波同步协调模型。LU K等[7]引入带宽周期影响因子和带宽需求比来建立新的干线协调控制模型性能指标函数,提出了面向不同双向带宽需求的干线协调控制优化模型。曲大义等[8]基于交通波理论模型,从协同角度优化公共周期、绿信比、相位差等控制参数。徐洁琼等[9]通过对交叉口流量的混合聚类处理,制定多时段控制方案,采用多目标粒子群算法确定切换方案的时刻。
近年来,有部分学者考虑对交叉口相位相序进行优化以解决车流到达不匹配而造成时空资源浪费的问题[10-16]。ZHANG C等[10]建立一个Multi-BAND模型,充分利用协调方向可利用绿灯时间。李祥尘等[11]提出一种基于交叉口相位优化的干线绿波协调控制方法,通过优化干线上的信号相位组成与相位顺序,提升双线干线绿波带带宽。GUO等[12]提出的左转相位提前关闭或滞后打开等措施在一定程度上增加交通干线双向绿波带宽。林丽等[13]基于Ring-barrier双环相位控制理念,结合干线协调控制技术,提出了一种适合于公交运行的相序与相位结构。
上述各类方法对城市交通干道协调控制的研究,虽然对干道协调控制有明显改善,但没有充分考虑相邻路口关联性的问题。本研究以城市交通干道协调联动控制的内在机理为出发点,基于城市交通干道相邻交叉口可协调阈因子进行交通控制子区划分。随后,协同优化公共周期、相位差、相位相序等信号配时参数,使交通干道双向带宽达到最优。采用交叉口总延误,燃油消耗和CO,HC,NOX尾气排放、停车次数、交叉口服务水平性能评价指标,评价城市交通干道控制系统优化情况。
1 城市交通干线协调控制模型
1.1 可协调阈因子
路口关联度是一个相邻路口之间关联性进行定量描述的交通参量,能综合反映相邻路口之间交通运行状况和交通干线协调控制需求差异对相邻路口关联性的客观影响[16]。一般使用可协调阈因子来确定交叉口之间是否需要实行干线协调控制。一般情况下可协调阈因子取值在30~100之间,当可协调阈因子小于30时,表明这两个交叉口关联性不强,不适宜做干线协调控制;当可协调阈因子大于100时,为了防止路段局部拥堵,需要设计干线协调联动控制;当可协调阈因子在20~100时,表明相邻交叉口有一定关联性,此时,需要综合考虑周围交叉口交通状况,确定是否需要对该交叉口进行协调控制。
相邻交叉口可协调阈因子计算模型如下:
CF=max(CF1,CF2)+AP+Av+Ac,
(1)
式中,CF为可协调阈因子;CF1为行程时间的初始协调因子;CF2为相邻交叉口路段间的流量因子;Ap为排队因子;Av为流量因子;Ac为周期长度因子。
行程时间的初始协调因子计算公式如下所示:
(2)
式中T为相邻交叉口之间的行程时间。
相邻交叉口路段间的流量因子计算公式如下:
(3)
式中,At为单个信号周期通过该交叉口的平均车辆数;Vl为平均每辆车占用路段车道长度;n为车道数;Ld为相邻交叉口间距。
排队因子Ap计算公式如下所示:
(4)
(5)
式中,Nq为周期内高峰时段上游车辆数;Q30为周期内最忙的30%车辆到达交通量;Q60为周期内最忙的60%车辆到达交通量;Qt为每个周期交通量总和。
流量因子Av计算公式如下:
(6)
式中Q2为道路两侧方向车流量总和。
周期长度因子Ac计算公式如下:
(7)
式中,T1为相邻交叉口大周期;T2为相邻交叉口小周期。
在进行交通干线协调联动控制之前,需要采集一些必要的交通数据,以此来确定干道协调控制范围。建设北路是唐山市南北向主要交通干道,车流量大,对交通信号控制要求较高,具有干线协调控制研究价值。以唐山市建设北路为研究对象,采集晚高峰18:00—19:00沿线各交叉口各进口道交通量、信号周期、相位、路段间距等交通数据。将调查数据输入Synchro仿真软件,计算相邻路口可协调因子,沿线交叉口可协调阈因子如表1所示。
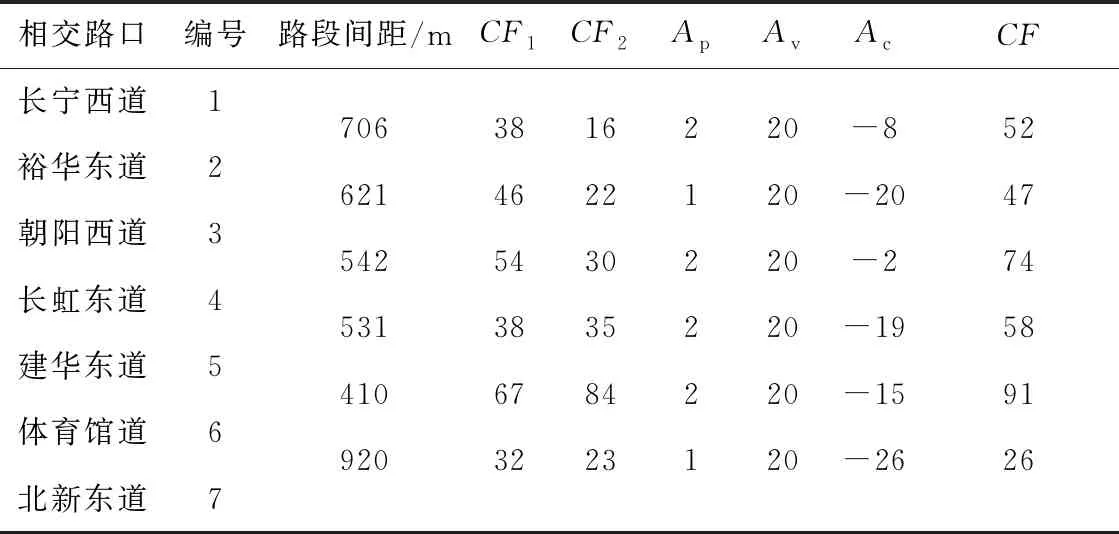
表1 可协调阈因子
由表1可知,可协调阈因子在26~91间。建设北路—北新东道(7#交叉口)可协调阈因子为26,表明建设北路—北新东道(7#交叉口)与建设北路—体育馆道(6#交叉口)关联性不强,将1#~6#交叉口划分为一个干道协调控制子区。
1.2 相位方案设计
交叉口合理设置保护相位、许可相位,是降低交叉口延误,增加干线协调带宽,提高道路通行效率的有效手段。在确定交叉口是否设置左转保护相位之前,需要综合考虑安全、通行能力、延误这3个重要因素。在交通干线协调控制中,传统的相位设计方法难以协调各进口方向饱和度差异,导致交叉口时空资源浪费严重,搭接相位能有效缓解各流向间饱和度不均衡现象,提高交叉口运行效率。
美国道路通行能力手册2010中[17],主要是采用以下4种判断指标判定是否设置左转保护相位:(1)交通量指标(左转车流量、对向直行车流量等);(2)延误类指标;(3)交通安全指标;(4)交叉口几何结构类型。各类指标阈值如表2所示。

表2 左转保护相位判断阈值
根据以上指标,6#交叉口(建设北路—体育馆道)近似T型交叉口,建设北路东侧设置障碍,没有车辆进出,所以采用相位方案(1);3#十字交叉口东西进口道(非协调方向)车流量比较小,进口道均为两车道(1直右、1直左),车辆延误比较小,拟采用相位方案(2);1#,2#,4#,5#十字交叉口非协调方向采用单独放行,拟采用相位方案(3);具体相位方案如图1所示。

图1 相位方案
1.3 公共周期与信号配时计算
1.3.1 公共周期优化模型
通过韦伯斯特(Webster)算法计算交叉口信号周期,并确定一系列信号配时参数。韦伯斯特(Webster)模型主要以车辆延误最小为目标,所以由于车辆受阻(过街行人,交通事故等)而引起的被迫停车、排队长度等因素,也在交叉口配时设计的考虑范围。
利用Synchro系统在可接受最短周期的基础上不断优化交叉口信号周期。若满足一定百分比的车道组交通量(如90%,70%,50%车道组交通量),则采用当前周期,否则增加信号周期长度。一直重复上述过程,直至得到最佳周期。Synchro采用性能指标确定是否采用该周期,计算公式如下:
(8)
式中,P为性能指标;D为交叉口延误;St为停车次数;Qt为受影响车辆数。
Webster计算模型:
(9)
(10)
(11)
(12)
式中,Co为最佳信号周期时长;Y为关键车道组的流率比之和;L为信号总损失时间;yi为第i相位的流量比;qi为第i相位车道车流量;si为设计饱和交通量;Ls为汽车启动损失时间;Ii为绿灯间隔时间;A为黄灯时间。
韦伯斯特计算模型的鲁棒性比较差,当交叉口交通量过小时,计算出来的信号周期过短。为保证车辆能够安全有序通过交叉口,需要设置信号周期最小值,一般设置25 s。沿线信号控制交叉口信号周期经Synchro系统优化后,5#交叉口(建设北路—建华东道)经优化后,最大周期为128 s,为沿线7个交叉口信号周期的最大值,故选取5#交叉口(建设北路—建华东道)作为交通干线协调控制系统中的关键路口。经分析比选,最终确定公共周期时长C为130 s。
1.3.2 信号配时计算
在交叉口信号配时模型中,某相位实际显示的绿灯时间与间隔时间之和减去该相位总损失时间后实际用于该相位的车辆通行的时间,即为该相位的有效绿灯时间[18]。
(1)有效绿灯时间:
Ge=Co-L,
(13)
式中Ge为有效绿灯时间。
(2)各相位有效绿灯时间:
(14)
式中gE,i为第i相位有效绿灯时间。
(3)各相位绿信比:
(15)
式中λi为第i相位绿信比。
(4)各相位绿灯显示时间:
gi=gE,i+A-Ii,
(16)
式中gi为第i相位绿灯显示时间。
根据公式(8)~(15)计算的信号配时参数如表3所示。

表3 沿线交叉口绿灯显示时间与绿信比
1.4 相位差设计
相位差为相邻交叉口同相位的绿灯启动时间之差,计算模型如下:
(17)
式中,θij为第i交叉口到j相位差;l为(i-j)路段长度;V为平均行驶速度;p为绿灯时间内到达车辆比例;Vk为下游交叉口到达流率;Co为信号周期;S为下游交叉口的饱和流率。
一般地,设置相位差应综合考虑交通量、交通方式、交叉口饱和度等多种因素。通常只在一个方向设置理想相位差,一旦某个方向设置了理想相位差,另一个方向的相位差通常已经确定。
2 协调控制评价指标
2.1 交叉口延误模型
《美国通行能力手册》[17]中的交叉口延误模型,主要针对车辆随机到达情况下,交叉口就存在排队车辆的情况。并且计算简单高效,模型估算方便,精确度高。计算公式如下:
D=D1×PF+D2+D3,
(18)
式中,D为交叉口延误;D1为均匀延误;D2为增量延误;D3为冗余需求延误;PF为信号联动修正系数。
(1)均匀延误D1:
(19)
式中X为车道组的v/c比。
(2)增量延误D2:
D2=900×T×[(X-1)+
(20)
式中,T为分析持续的时间;K为增量延误系数,一般取0.5;I为上游交叉口相位转换的增量延误修正;c为车道组通行能力。
(3)信号联动修正系数PF:
(21)
式中fPA为队列到达的追加修正系数。
2.2 燃油消耗模型
synchro中燃油消耗计算式如下:
(22)
(23)
(24)
式中,Fi为流向i的平均油耗;TTi为流向i平均行驶路程;Vi为流向i平均行驶速度;di为流向i车辆的平均延误;hi为流向i车辆的平均停车次数。
2.3 尾气排放模型
CO,HC,NOX尾气排放与汽车燃油呈现正相关关系,具体计算模型如下:
(25)
2.4 停车次数模型
Synchro系统中的停车次数计算与停车延误息息相关,并且规定停车延误小于10 s的车并不完全停车,参数如表4所示。

表4 车辆延误-停车百分比表
停车次数计算模型如下:
(26)
(27)
式中,Ni为第i相位平均停车次数;N为1个周期内总平均停车次数。
2.5 服务水平模型
Synchro系统采用了HCM2010[17]中对服务水平的定义,继续使用HCM2000中的控制延误来评价交叉口。控制延误与服务水平关系如表5所示。
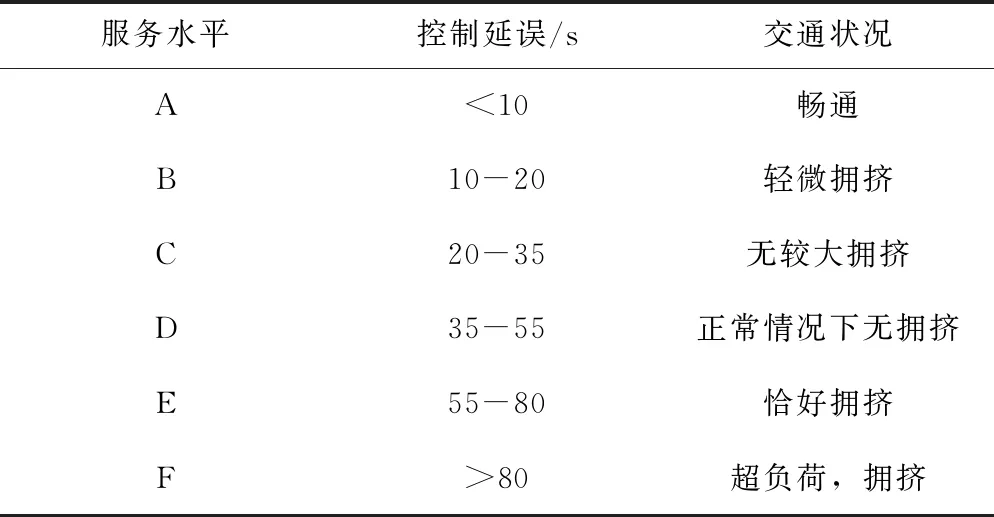
表5 控制延误与服务水平关系表
3 交通干线协调Synchro仿真
Synchro仿真软件是由美国Trafficware公司基于交通部标准HCM规范研发的。该规范标准中的各种参数,是根据驾驶行为、交通法律法规等设定的。Synchro仿真软件不仅具备感应式信号控制仿真、自适应信号控制仿真、信号协调控制仿真等功能,还兼具一些传统交通仿真软件(如CORSM、TRANSYT—7F等)接口,极具工程使用价值。
Synchro仿真软件但能直观显示图形,而且具有较强的计算能力。计算得出的总延,CO,HC,NOX尾气排放、道路服务水平等结果,作为方案对比参数,对交通管理部门具有一定的参考价值。
3.1 仿真环境建立
3.1.1 路网模型
在Google地图上截取研究路网所在区域的图片作为仿真路网模型的底图。在Synchro7.0软件中调用file—Select Backgrounds窗口,加载背景底图,按照1∶1比例,使软件里设置的路段长度与实际道路长度相匹配,绘制的路网拓扑结构如图2所示。

图2 路网拓扑结构
3.1.2 数据输入
选择交叉口后,首先调用Lane setting窗口,输入各进、出口道街道名称、交叉口横断面形式、车道数、行驶速度、左、右转因素等参数。为了保证交通仿真的准确性,需要确定仿真流量加载时长,进行道路网络交通量的加载。其次调用Volume Settings窗口,设置高峰小时系数、大车率、行人冲突等参数。最后调用Timing Setting窗口,分别设置沿线交叉口的大车率、相位方案、有效绿灯时间等参数。这里截取建设北路-长宁西道(1#)交叉口拓扑图,如图3所示。
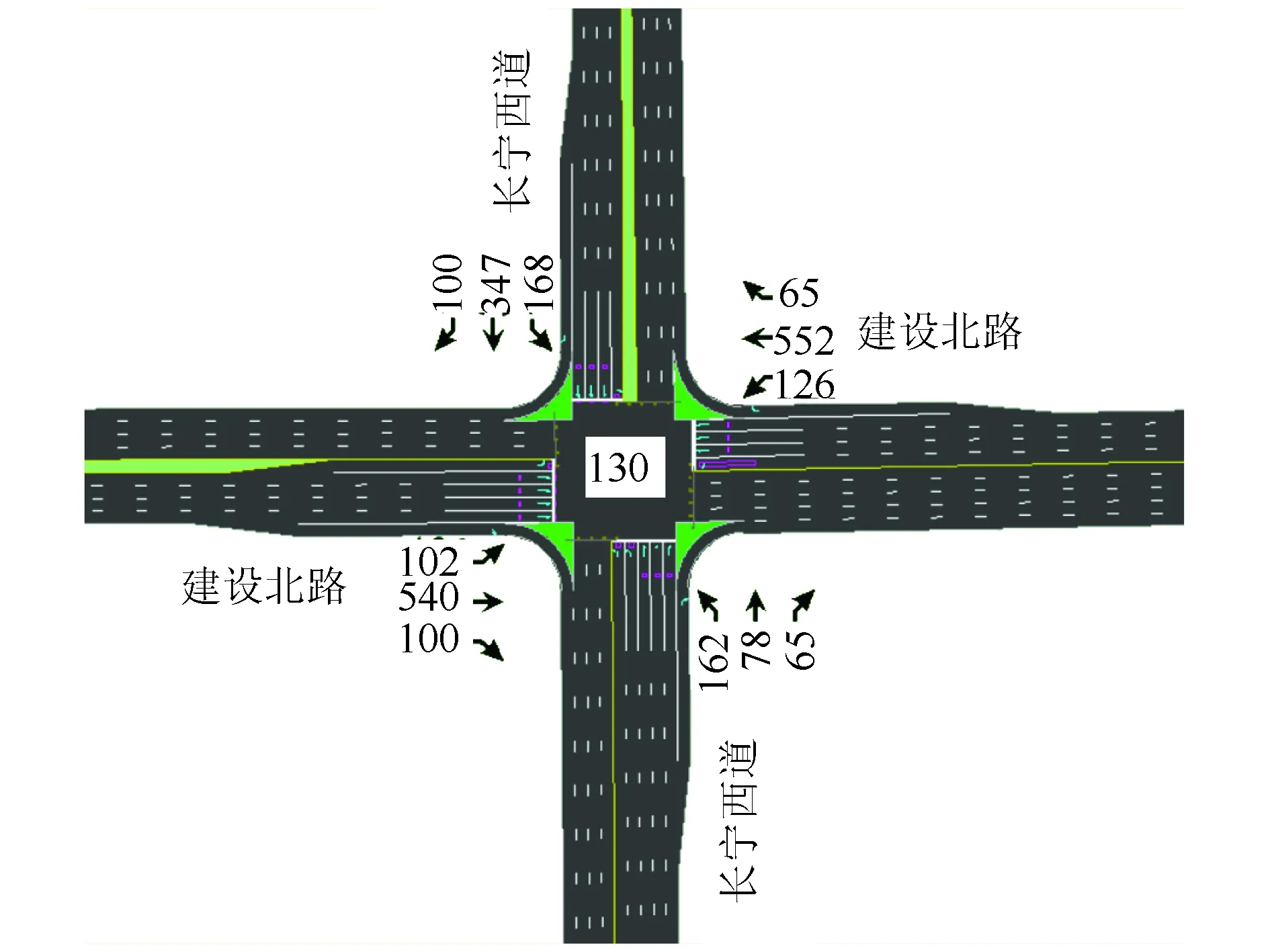
图3 建设北路-长宁西道拓扑图
4.2 生成双向交通干线协调方案
建设北路现状交通信号主要采用单点控制,主线车流行驶延误大,平均行驶速度慢。生成双向交通干线协调方案流程如下:
Setp 1:调查收集基本交通数据,根据可协调域因子进行协调子区划分。
Setp 2:确定关键路口以及公共周期时长,酌情考虑是否设置双周期。
Setp 3:系统优化沿线交叉口绿显时间和绿信比。
Setp 4:设定干道协调控制速度,计算带宽以及相位差。
Setp 5:根据Sychro仿真系统运行效果实时调整信号控制参数,若方案达到最优,则停止进行仿真;否则,返回Setp 3继续进行,直至达到系统最优。
以5号交叉口(建设北路-建华东道)为关键交叉口,公共周期为130 s,3号交叉口(建设北路—朝阳西道)信号周期较短,拟采用半周期,干线协调系统设计速度为50 km/h。根据Synchro仿真试运行情况,合理分配道路资源,不断优化干线协调带宽、相位差。交通流量不断变化,并具有不均匀性,拟采用50 th百分比延误场景(若观察100个周期,50 th场景为第50个繁忙周期)。
优化后南往北干线协调带宽(NB Arterial Band)为23 s,北往南干线协调带宽(SB Arterial Band)为24 s,1#~6#交叉口的绝对相位差分别为43,122,13,47,18和10 s。优化后的时距图如图4所示。
3.3 仿真评价与分析
根据上述参数设置,调用SimTraffic Animation窗口,随时观察实时路况模拟效果。优化前后数据对比如表6所示。
由表6可知,城市交通干线实行双向干道协调控制后,沿线交叉口控制效果得到了明显提高。1#交叉口(建设北路-长宁西道)总延误优化效果最明显,优化率为26.67%,沿线各交叉口总延误由40.8 hr降至34 hr,优化率为16.67%。朝阳西道与长虹东道(3#,4#交叉口)之间存在无信号控制行人过街开口,可能会导致建设北路—朝阳西道(3#交叉口)出现负提升。汽车燃油消耗由157.7 L降至136 L,优化率为13.76%。CO,HC,NOX尾气排放与燃油消耗呈现正相关,优化率与燃油消耗保持一致。Synchro仿真时间内所有车辆总停车次数由2 291 次下降到2 033次,优化率为11.26%。各交叉口的服务水平也得到明显的提升,其中,3#交叉口(建设北路-朝阳西道)提升最为明显,由D提升到了B,基本达到了优化目标。
4 结论
城市交通干道协调控制不仅是交通控制领域研究的一个热点,也是智能交通研究的重点。本研究选择河北省唐山市建设北路主干线为研究对象,根据交叉口可协调阈因子划分交通控制子区,分别计算控制子区的协调控制参数。根据现场收集的交通信息,确定交通干线协调控制的公共信号周期、绿信比等参数,合理设置搭接相位,优化沿线路口相序。运用Synchro7.0系统建立仿真模型,仿真结果,双向城市交通干线协调控制策略可以明显降低交叉口总延误和燃油消耗,具有一定实用性和可行性。
本研究的不足之处在于在采用Webster计算公共周期时没有考虑非机动车、过街行人、车道车辆滞留等因素。我国作为发展中国家,城市交通基础设施在不断完善过程中,机非混合现象突出,后续将着重开展相关研究。
猜你喜欢
艺术评鉴(2022年6期)2022-05-10
汽车实用技术(2022年3期)2022-02-23
中国航海(2019年2期)2019-07-24
澳门月刊(2017年10期)2017-10-14
科技创新导报(2016年20期)2016-12-14
伴侣(2015年2期)2015-09-10
筑路机械与施工机械化(2015年11期)2015-07-01
空间控制技术与应用(2015年2期)2015-06-05
筑路机械与施工机械化(2014年10期)2014-03-01
中国信息化·学术版(2013年4期)2014-01-03