
基于相干多普勒测风激光雷达的南极中山站低空大气风场应用研究
2022-04-24 05:54王章军王睿李辉庄全风黄文涛柳付超班超陈超
极地研究 2022年1期
王章军 王睿 李辉 庄全风 黄文涛 柳付超 班超 陈超
(1 齐鲁工业大学(山东省科学院),山东省科学院海洋仪器仪表研究所,山东 青岛 266061;2 中国极地研究中心,自然资源部极地科学重点实验室,上海 200136;3 武汉大学电子信息学院,湖北 武汉 430072;4 中国科学院大气物理研究所,中层大气和全球环境探测重点实验室,北京 100029)
0 引言
低空大气风场探测对大气湍流、气溶胶运输和雾霾扩散等大气环境变化问题的研究十分重要。极区大气对全球大气环境变化十分敏感,是我们了解和监测全球环境变化的重要区域。但南极地区的极端环境导致观测数据稀少,因此对于南极低空大气风场观测显得尤为重要。
国内南极大气风场的研究主要采用地面观测资料、探空数据分析、卫星数据及激光雷达观测等手段。利用地面观测资料和探空数据对南极风的研究工作开展较早,例如,刘树华和熊康[1]应用日本南极昭和基地1982 年的探空资料,讨论了从地面至20 hPa 高度之间的风、温、湿场及大气环流特征的月平均年变化;胡胜利[2]利用气象观测资料、云图接收和天气图分析,总结了中山站不同类型的大风天气过程;许淙等[3]利用2002 年1 月至2003 年12 月南极中山站的天气观测记录和天气形势图,分析了风向、风速的分布特征及风向相互间的变化规律;卞林根等[4]利用南极长城站和中山站的地面气象观测资料,分析了长城站(1985—2008 年)和中山站(1989—2008 年)的平均风速季节变化特征、年际变化和趋势;徐敏等[5]基于1987—2017 年南极点的无线电探空数据,研究了地面至30 km 高度的气温、风向和风速的垂直分布及变化趋势。卫星遥感资料具有覆盖范围大、可连续观测等优点,也被用于对南极风场的研究。马艳辉[6]基于散射计数据对南极周边海域海面风场做了统计特征分析;张婷等[7]利用2012年全年的ASCAT(Advanced Scatterometer)散射计风场数据,对55°S 以南的南极周边海域海面风场开展了时空分布特性统计分析。激光雷达测风技术具有传统测风手段不可比拟的性能优势,如时空分辨率高、可进行三维风场实时测量,并且具有运行可靠、无人值守、可长期连续运行的特点,使其具备在极区部署观测的优势。国际上多个课题组已在极地利用激光雷达进行风场观测方面的研究。Kawahara 等[8]在2010 年9 月将研制的基于Nd:YAG 激光器的钠温/风激光雷达部署在挪威Tromsø 极区,进行了风、温的同时测量;Chu等[9]2017—2018 年在南极McMurdo 站部署了钠荧光多普勒测风测温激光雷达,可对中间层钠原子、温度和垂直风进行观测。国内开展极区激光雷达测风观测研究始于中国第35 次南极科学考察(2018—2019 年),在南极中山站部署了一套钠荧光多普勒激光雷达观测系统,能够同时观测中高层大气温度和三维风场[10]。随后,中国第36 次南极科学考察期间(2019—2020 年),在中山站建成了一套由三部激光雷达组成的中低层大气激光雷达探测系统,包括:纯转动拉曼激光雷达[11]、瑞利/米散射激光雷达[12]和相干多普勒测风激光雷达,分别探测对流层大气温度的精细结构、平流层-中间层大气温度和边界层大气风场精细结构。
相干多普勒测风激光雷达作为一种主动遥感手段,具有时空分辨率高、功耗低、体积小等优点,能够进行低空风场的精细探测。目前国内相干多普勒测风激光雷达探测系统发展迅速,西南技术物理研究所冯力天等[13]报道了1.55 μm 全光纤相干多普勒测风激光雷达系统,实现了5~200 m高度范围的风场测量,并与测风塔数据进行了比对;中国科学院上海光学精密机械研究所Liu 等[14]报道了基于1.539 μm全光纤的相干多普勒测风激光雷达系统,之后Diao 等[15]对系统进行了升级;中国海洋大学吴松华等[16]报道了1.55 μm 全光纤相干多普勒测风激光雷达系统,并经过不断改造和升级,将系统用于湍流、风切变观测的研究[17-19];另外,中国科学院安徽光学精密机械研究所[20]、中国电子科技集团公司第二十七研究所[21]、北京理工大学[22]、中国科学院光电技术研究所[23]等众多高校及科研机构也开展了相干多普勒测风激光雷达系统的相关研究工作。本文介绍的相干多普勒测风激光雷达是由中国极地研究中心牵头、山东省科学院海洋仪器仪表研究所研制,我国在南极大陆部署的首套低空大气风场测量激光雷达。本文的主要内容包括系统结构、原理算法、观测数据和对比分析等。
1 相干多普勒测风激光雷达简介
多普勒测风激光雷达基于光的多普勒效应,通过向大气中发射激光并检测回波信号的多普勒频移,从而实现风速反演,获得大气风场信息。相干探测技术通过大气后向散射信号与系统本振光差频获取多普勒频移,反演得到大气风场。相干多普勒测风激光雷达工作原理如图1 所示。本振激光器发出连续激光,频率为f0,经过分束后一路作为本振光源,另一路经调制放大后输出频率为f0+γ的激光,经收发一体装置和扫描转镜后发射到大气中,大气气溶胶粒子与激光相互作用产生后向散射信号,根据多普勒效应,后向散射回波的频率相对于发射激光频率产生一个与气溶胶粒子移动速度相关的频移,与本振光混频,探测器响应二者差频,输出频率为γ+Δf的电信号。此电信号经放大及预处理后,由实时信号采集处理模块进行采集和处理,求得回波信号的频移,然后计算出空间不同距离处的径向风速,重复求得多组不同角度的径向风速,然后对获取的径向风速、角度和距离数据进行处理,即可反演出三维风场的分布信息。
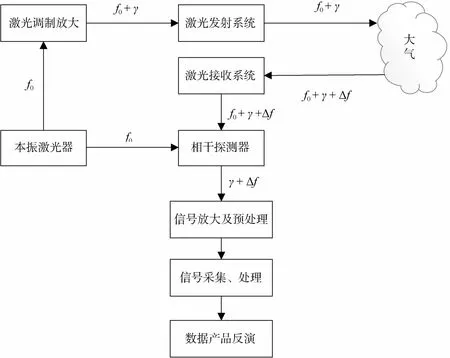
图1 相干多普勒测风激光雷达测风原理图Fig.1.Schematic diagram of wind measurement of the coherent Doppler wind lidar
相干多普勒测风激光雷达的总体设计方案如图2 所示,包括高稳定性的发射系统、高效率接收系统、数据采集及控制系统和三维扫描装置四个主要功能单元。采用窄线宽光纤激光器作为发射光源,利用声光移频器使激光频率产生120 MHz的频率差,确保极区大风条件下可正常测量;之后经过保偏光纤放大器,出射具有较高能量的激光,保证该系统在极区特殊大气环境下具有较大的探测距离。光环行器既可实现收发光路同轴,减小测量盲区,又可防止发射光的后向反射光对激光器造成损伤。平衡探测器可将大气气溶胶后向散射信号光与本振光进行拍频,信号采集卡将平衡探测器得到的幅值信号进行采样,并通过快速傅立叶变换方法,解析得到多普勒频移,最终反演得到径向风速。为了获得大气水平风速和风向,通过收发一体扫描装置,改变激光发射方向,采用多波束扫描模式反演大气风廓线。为确保多普勒测风激光雷达在南极恶劣环境下长期、稳定工作,激光雷达放置在定制的观测舱中,观测舱内温度维持在20℃左右,激光束通过观测舱上方定制的直径为300 mm 玻璃窗片发射到大气中,实现大气风场的实时观测。系统主要技术指标如表1 所示。
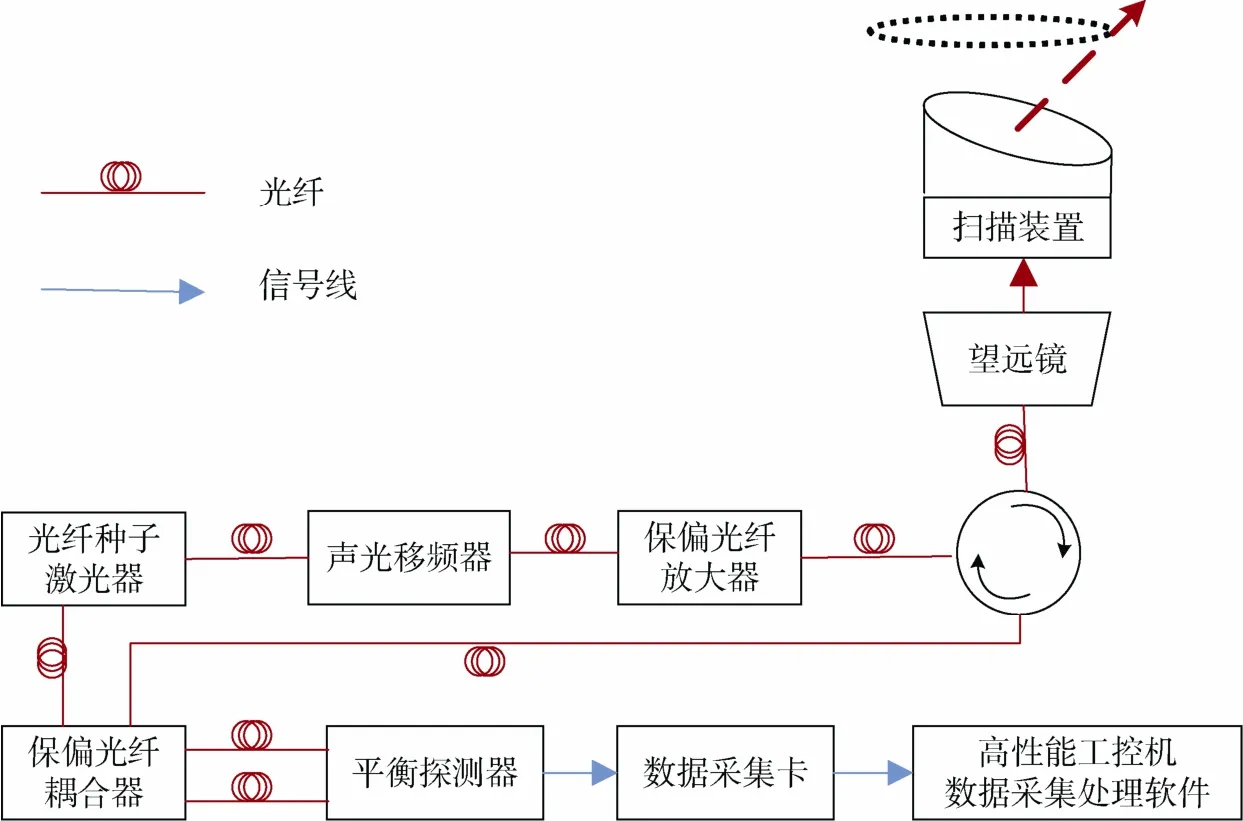
图2 相干多普勒测风激光雷达结构示意图Fig.2.Structure diagram of the coherent Doppler wind lidar

表1 相干多普勒测风激光雷达系统技术指标Table 1.Technology parameters of the coherent Doppler wind lidar
系统利用多普勒光束定向摆动扫描技术(DBS,Doppler-Beam-Swinging)测量风廓线。假设测量的三维风场在同一高度上大气状态均匀不变,激光分别在垂直方向和以一定的仰角在东、南、西、北方向进行测量得到径向风速,分别表示为VlosZ、VlosE、VlosS、VlosW、VlosN。径向风速是风场中垂直风速和水平风速在各个径向方向的矢量合成,将大气风场看作一个u-v-w坐标系,激光束与水平面的夹角为θ,则对大气风场进行矢量分解,可表示为[24]:

通过计算式(1),可以得到大气风场的水平分量u、v和垂直分量w的表达式为:


合成风矢量方向可表示为:

需要注意,由于风矢量方向α是在0°到360°之间变化的,需根据矢量所在的象限判断风向:若u≥0,v≥0,则α的值不变;u<0,v>0,则α=180°–α;u<0,v<0,则α=180°+α;u>0,v<0,则α=360°–α。另外,由于习惯上风向是风吹来的方向,因此真实的风向Dir和风矢量α的方向相差180°,在处理过程中要加180°,即:

2 观测和分析结果
2.1 实验标定测试
相干多普勒测风激光雷达研发完成后,针对系统调试与优化进行了大量实验,包括对光路的反复校准和对系统机械结构的不断优化。为进一步对激光雷达观测结果进行数据比对验证,课题组于2019 年8 月30 日—9 月2 日期间在中国气象局气象探测中心国家气象计量站进行了数据质量对比测试(如图3 所示)。

图3 数据质量对比测试。a)相干多普勒测风激光雷达实验现场;b) L 波段探空仪实验现场Fig.3.Data quality assessment.a)field observation photo of the coherent Doppler wind lidar;b)field observation photo of the L-band sounding radar
用于比对测试的L 波段GTS1 型数字探空仪风速测量精度(RMS)为1 m·s–1(风速<10 m·s–1)、10%(风速>10 m·s–1),风向精度为 5°(风速>25 m·s–1)、10°(风速<25 m·s–1)。在观测期间,数据比对分析考虑了时间、高度的匹配。取气球释放10 min 后的数据进行累计平均,高度匹配选取与相干多普勒测风激光雷达高度距离库相邻最近的对应L波段探空仪高度处的数据,且距离差≤10 m。
经统计,共有风速、风向可对比统计点678 对,风速比对结果如图4 所示,风速的相关系数为0.907,标准差为0.565 m·s–1,图中数据结果在纵向呈现条带状分布,是由于L 波段探空仪风速的测量分辨率为1 m·s–1,而激光雷达的风速数据分辨率更高。图5 所示为风向比对结果,在比对过程中已经考虑了两组风向差值大于180°的情况,并对其进行 360°补偿,因此风向坐标刻度会出现大于 360°的情况,计算获得风向的相关系数为0.832,标准差为6.02°。对比结果表明,相干多普勒测风激光雷达系统数据质量较好,满足设计要求。

图4 相干多普勒测风激光雷达与L 波段探空仪风速比对数据统计结果图Fig.4.Statistical results of wind speed data acquired by the coherent Doppler wind lidar and the L-band sounding radar
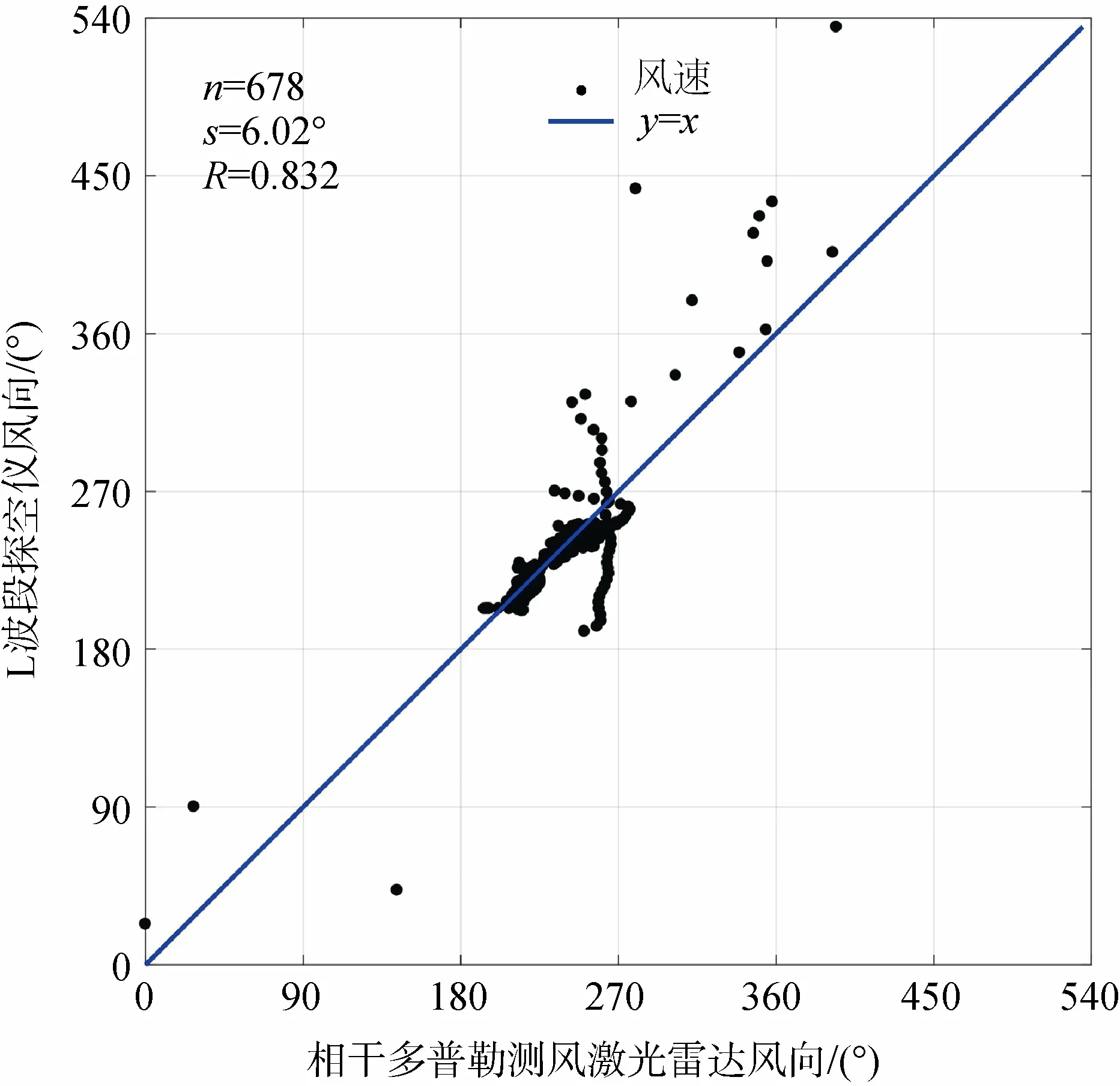
图5 相干多普勒测风激光雷达与L 波段探空仪风向比对数据统计结果图Fig.5.Statistical results of wind direction data acquired by the coherent Doppler wind lidar and the L-band sounding radar
2.2 相干多普勒测风激光雷达南极中山站观测数据
2019 年10 月22 日,相干多普勒测风激光雷达于上海装船,搭乘“雪龙”号前往南极中山站,系统经现场安装、调试和优化后,于2020 年1 月8 日正式开展常规观测,截至2021 年3 月1 日共获得1000 余小时现场观测数据。图6 和图7 为相干多普勒测风激光雷达在南极观测期间一次典型的连续观测结果。

图6 2020 年04 月15 日测风激光雷达在中山站连续20 小时风速观测结果图Fig.6.Wind speed observation results with wind lidar at Zhongshan Station for 201 h on 15 April,2020

图7 2020 年04 月15 日测风激光雷达在中山站连续20 小时风向观测结果图Fig.7.Wind direction observation results of wind lidar at Zhongshan Station for 20 h on 15 April,2020
从图6 和图7 可以看出,2020 年4 月15 日进行了全天候连续测风观测实验,观测期间连续20个小时内系统稳定运行,观测的风速结果显示,在04:00至14:00(UTC)时间段(当地白天时间),约1~2 km 高度范围内,出现风速值较大的分布,风速值在10 m·s–1以上,甚至达到20 m·s–1;而低空风速相对较低,在10 m·s–1以下,白天极区大气热量的不均匀分布导致了风速显著分层分布。而14:00(UTC)以后,风速在有效探测高度内呈现较均匀的分布,在15 m·s–1以下,这与晚间大气环境相对稳定吻合。从图7 风向分布来看,风向基本在0~90°范围内,显示为东北风。
2.3 相干多普勒测风激光雷达与南极中山站地面气象台数据比对
南极中山站地面气象台位于南极洲东南极大陆拉斯曼丘陵(69°22′S,76°22′E),与相干多普勒测风激光雷达观测地点水平距离约150 m,设备分布如图8 所示,其中左上角五星标注的位置是南极中山站地面气象台,右下角方形标注的为相干多普勒测风激光雷达观测地点。气象台采用XFY3-1 型风速风向传感器(强风计)对风速等要素进行观测,该设备具有抗强风、测风范围宽、空气动力性能好、工作稳定可靠、使用方便等特点,其风速测量范围在1~95 m·s–1;风速在0~10 m·s–1时,风速准确度≤±0.5 m·s–1;风速在10~95 m·s–1时,风速准确度≤±5%×测量值;风向准确度为±5°。

图8 南极中山站地面气象台与相干多普勒测风激光雷达观测点分布图Fig.8.Locations of the meteorological station and coherent Doppler wind lidar at Zhongshan Station
为验证相干多普勒测风激光雷达在南极测风结果的稳定性与准确性,选取2020年3月2日06:00—10:00(UTC)期间,测风激光雷达与地面站提供的测风数据进行对比。由于近地面同一高度内风速相对稳定,本文忽略两者因海拔高度引起的差异。将对比期间的数据绘制风速时间序列图(图9)和风向时间序列图(图10),可以看出在该时段内两者的测风观测结果具有很好的一致性。

图9 2020 年3 月2 日测风激光雷达与XFY3-1 型风速风向传感器风速对比时序图Fig.9.Comparison of wind speed measured by wind lidar and XFY3-1 on 2 March,2020

图10 2020 年3 月2 日测风激光雷达与 XFY3-1 型风速风向传感器风向对比时序图Fig.10.Comparison of wind direction measured by wind lidar and XFY3-1 on 2 March,2020
3 结论
本文介绍了一台自主研发的相干多普勒测风激光雷达系统,该系统已在南极中山站成功进行安装部署并获得了良好的连续观测数据,为南极低空大气探测提供了全新的观测手段,填补了我国对南极大陆低空大气风场探测的空白。由于系统测风高度受限于相干测风技术,未来将考虑研发非相干多普勒测风激光雷达用于获取更高探测高度和测量精度的风场数据。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
成都信息工程大学学报(2021年5期)2021-12-30
海洋通报(2021年5期)2021-12-21
少年文艺·我爱写作文(2019年8期)2019-09-12
中国诗歌(2018年6期)2018-11-14
百科探秘·航空航天(2017年12期)2018-01-31
今日华人(2018年2期)2018-01-16
小猕猴学习画刊(2015年10期)2015-10-26
