全自动液体处理工作站设计
2022-05-02 13:06汤淋淋
农业装备技术 2022年2期
姚 阳,汤淋淋
(1.南通理工学院,江苏 南通 226000;2.硅湖职业技术学院,江苏 昆山 215300)
0 引 言
全自动液体处理工作站是一个综合学科的机械设备,目前主要应用于医疗检测领域液体的前处理中,整个工作站的研发涉及到机械设计、运动控制、软件设计等,具有学科交叉性强和综合性高等特点。目前,国内在液体处理方面存在自动化程度较低、模块化功能较少、可靠性不足、稳定性较差等缺点。为了打破国外的技术垄断,迫切需要进行国内的全自动液体处理工作站的设计开发。
1 液体处理工作站总体设计
液体处理工作站是基于多轴协同配合运行的组合式机构,其涵盖的技术较多,如精密设备、电机运动控制、伺服控制系统和传感器技术,集成化程度较高。根据国内外文献资料调研以及市场已有的设备,本文设计的全自动液体处理工作站以模块化结构为主,且结构形式为由上到下,主要机械结构包括工作站底座、机械臂和移液模块。
底座是液体处理工作站的基本部件,也是该系统的承载部件,液体处理工作站都是基于底座来工作的。在底座上需要进行工位设置,如试剂盒存放工位、废料回收工位和混匀仪摆放工位。
液体处理工作站的核心部分是移液模块,其作用是在液体移动过程中将液体吸取和放置,而且是定量的。移液模块的运行方式是机械的,主要执行的动作有枪头安装和脱落,配合机械臂的使用可以实现液体的准确移动。同时在微量泵中配有液位检测传感器和压力传感器,能够进行液位和压力的实时监测,及时调整堵塞、泄露以及空吸等情况。液体处理工作站通过机械臂代替人力操作,主要是实现夹取功能,用于深孔板的夹取转移,在空间具有3 个自由度,实现X、Y、Z 3 个方向上的移动。
本文设计的液体处理工作站采用4 列3 行共12 个管位,可以放置2 个托盘,共计192 个试管;吸头盒可以放置4 个吸头,吸头盒后部为废弃吸头回收盒。整体结构简单,用户操作方便,无需投入过多的学习成本即可实现快速熟悉,快速操作。最终的整体造型设计如图1 所示。

图1 整体结构示意图
2 液体处理工作站结构设计
2.1 液体处理工作站底座以及定位结构设计
底座是整个工作站的承重和支撑结构,主要由工作台和支撑脚组成,工作台材料选用铝合金6061,表面阳极氧化梳理;底部装配有4 个M10×60 橡胶底支撑脚。底座上部为定位实验器材的定位托盘,托盘全部采用模块化设计,针对不同器材,设计不同的定位托盘,采用直径10 mm 圆柱销定位托盘,托盘可以随时更换,具体如图2 所示。
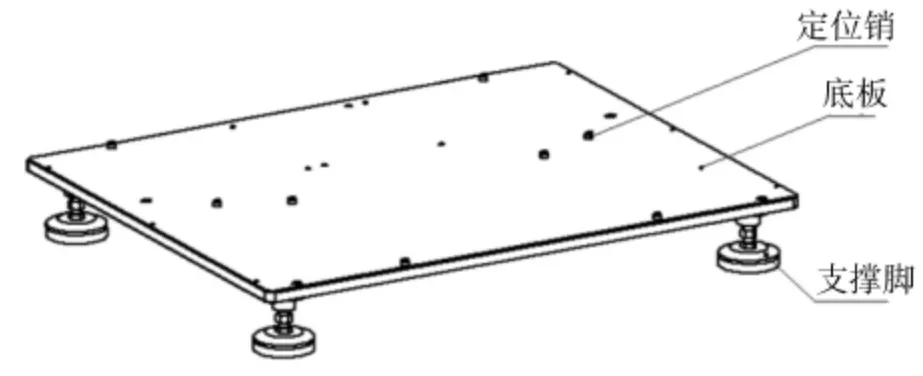
图2 底座结构
2.2 机械臂选型设计
机器人的机械臂通常是由驱动装置、导向装置和运动装置3 部分组成。目前常用的驱动方式包括液压驱动、气压驱动和电气驱动;常用的导向装置包括滚珠丝杠装置和滑块导轨装置;常见的机械臂坐标系统包括球坐标系统、直角坐标系统、柱坐标系统。液体处理工作站系统中需要实现X、Y、Z 轴3 个方向移动到指定的工作位置,所以选用直角坐标式机械臂;尽管球坐标、柱坐标式机械臂都可以满足液体处理工作站的功能性要求,但是其结构较为复杂,同时在移液过程中,移液枪头需要时刻保持竖直状态,增加了系统的操作复杂性,因此该处采用球坐标和柱坐标不合适。采用直角坐标系机械臂不仅可以通过电机控制实现3 个方向的自由移动,而且实现枪头和微孔板的定位操作也较为简单准确,具有快速反应和高可靠性等优点,因此最优选择为直角坐标系机械臂。
2.3 移液模块设计
机械臂在Z 轴方向上的运动就是移液模块的运动。由图3 可知,移液模块主要由底座、移液器和脱枪头部件3 个组件构成。其中,底座部分主要由基板、线性导轨、传动结构和控制电路控制板组成。线性导轨采用的是滚珠式线性导轨,型号为MGN12C,并且在地板上进行了位置限制,这样可以保证导轨移动的精度;在传动结构部分,选用电机驱动作为原动力,梯形螺杆作为传动部件,电机为丝杠传动步进电机。脱枪头部件安装在电机上,并且通过螺母固定,移液器安装在脱枪头组件上,直线推力电机的转动带动脱枪头工作,进而带动移液器工作,这样就形成了电机驱动移液器和脱枪头均在线性导轨上移动的工作过程。在移动过程中,为了保证到达位置的精确性以及限制移动最大行程,在线性导轨两端分别设置光电式传感器,当光电式传感器检测到有物体靠近时,将检查到的信号发送到控制电路板,然后控制电机的工作状态,保证移液器和脱枪头在有效行程内。
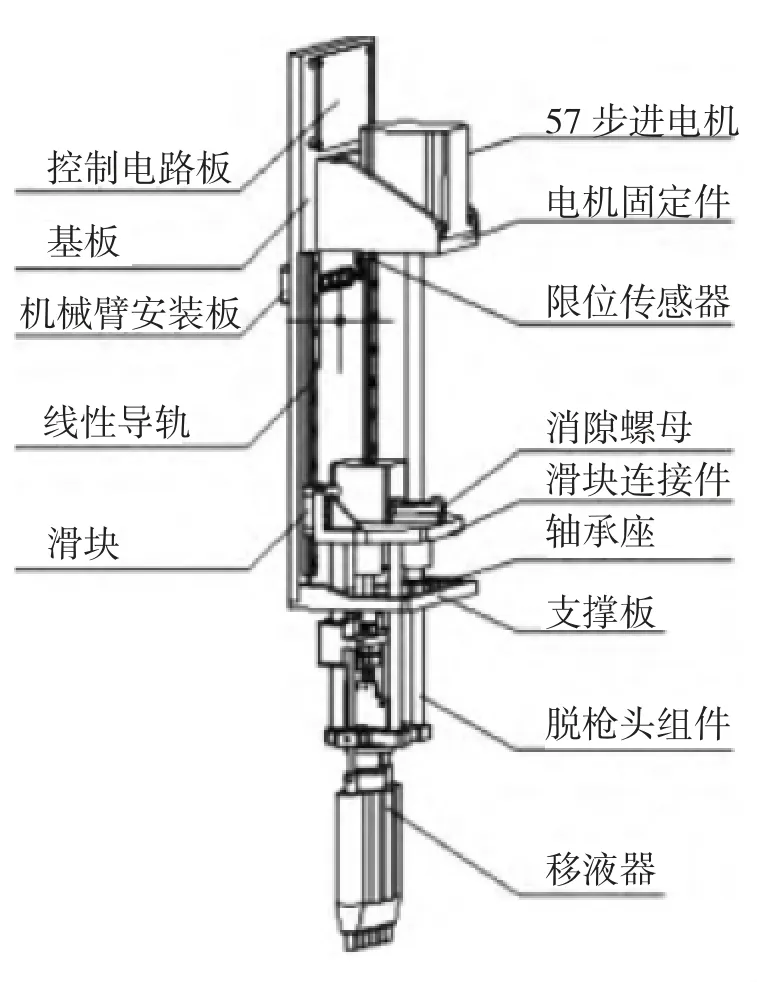
图3 移液模块整体结构
由图4 可知,脱枪头组件由5 部分构成,分别是轴承、脱枪头板、电机、轴和支撑板。其中电机安装在滑块连接板上,电机的输出轴与固定块支架安装有连接轴的轴承,在滑块连接板的下方安装4 根支撑轴用于整体结构的支撑,在支撑轴的下端安装支撑块进行结构加固。在背面的2 根支撑轴上,安装直线轴承和脱枪头板,在下端安装有传感器、轴套和推杆。移液器安装在连接轴上,通过磁铁吸附连接,通过传感器、轴套和推杆的配合工作,可以克服磁铁的吸力进行移液器具和枪头脱离的操作。
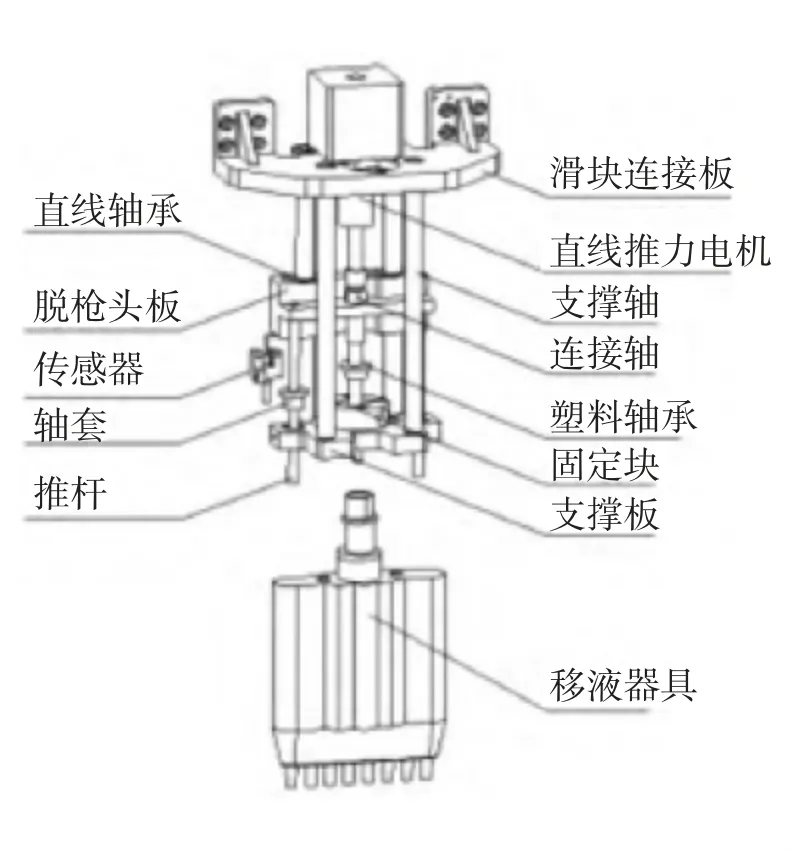
图4 脱枪头组件结构
3 移液模块关键结构设计
移液模块最重要的部分就是移液器,它的功能是进行液体吸取和排放。在本次设计过程中,采用的移液器是活塞式的,有8 个液体通道,每个通道的存储量为200 mL,具体结构如图5 所示。8 个通道的排列方式为并列排布,每个通道内有活塞,活塞安装在活塞架上,并且通过轴承连接与套筒相连。中间活塞杆的上端和电机轴连接并且通过磁铁吸附连接,另一端和活塞架连接,通过直线推力电机的运动使得连接轴带动活塞杆移动,从而带动活塞在套筒中进行上下移动,实现液体吸取和液体排放的操作。在液体吸取和液体排放的工程中,由于运动过程中存在震动,为了保证活塞和套筒位置的直线性,在活塞架的上方安装固定件进行位置的竖直固定。为了让活塞运动过程更加平稳,在活塞杆上安装滑动轴承,可以减小活塞杆和导向杆在运动过程中产生的摩擦力。当活塞杆受力时,外壳以下部分脱离导向销实现脱枪头动作,当活塞杆不受力时,由于外壳和导向销之间安装有弹簧,通过弹簧的拉力使得外壳以下部分回到原位。
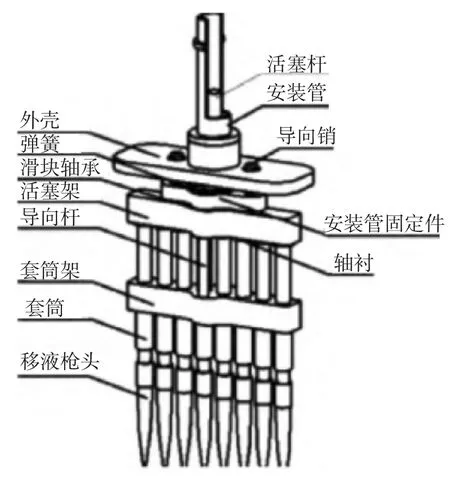
图5 移液器结构

图6 活塞剖面
由于该工作站处理的样品均为液体,需要保证液体吸取和液体排放的精度,防止液体的泄露,因此对密封性能有较高的要求。通常采用密封圈进行密封处理。本文在移液枪头和套筒中都设置有O 型密封圈。当枪头进入套筒时,安装在枪头上的密封圈在摩擦力的作用下会发生变形,更紧贴套筒内壁,提高了密封性能,保证了枪头在运动过程中的稳定性。图6 为活塞与套筒密封结构图,塑料套安装在套筒架上,在套筒架上方安装活塞架,活塞架的内部安装活塞,活塞的外壁和塑料套的内壁进行面面接触,由于两者在运动过程多次摩擦,长时间工作后,磨损加剧,面面接触失效,导致密封失败,因此在塑料套的外侧安装弹性圈,当磨损加剧之后,在弹性圈自身弹力的作用下,将塑料套向内推,进一步补偿磨损量,让活塞和套筒一直保持面面接触,保证密封效果。
4 结 语
本文设计了一种具有8 通道的自动化液体处理工作站,通过机械臂以及移液模块保证移液的精度和效率,该工作站该可进行液体样品的转移、稀释、定容、添加等,减少手工转样的人力投入及出错风险。
猜你喜欢
轻兵器(2022年10期)2022-10-22
装备维修技术(2021年20期)2021-03-29
科学与财富(2018年23期)2018-08-19
学苑创造·B版(2018年6期)2018-07-09
百科探秘·航空航天(2018年1期)2018-05-14
幼儿教育·教育教学版(2016年5期)2016-09-30
农机使用与维修(2014年5期)2014-09-23
农村百事通(2009年14期)2009-08-04