模糊控制在地铁屏蔽门调速过程中的应用研究
2022-05-07 02:13段洪亮朱明亮
铁道车辆 2022年2期
段洪亮,朱明亮
(中车长春轨道客车股份有限公司,吉林 长春 130000)
地铁屏蔽门是地铁系统的一个重要组成部分,与站台等土建结构结为一体,屏蔽门系统主要由门体结构、电动机、减速器和传动装置组成。传动装置是单电动机同轴驱动(保证两扇门运行同步),一般为同步齿形带传动或者滚珠螺杆传动。屏蔽门开始运行后,电动机带动传动装置经过减速器将转动转化为滑动门门体的平动[1-2]。无刷直流电动机与有刷直流电动机相比,取消了接触式的换向器,调速性能更好,体积更小,产生的噪声更小,寿命更长,几乎不需要进行维护,作为驱动电动机被广泛地应用在地铁屏蔽门运行系统中。模糊控制可以通过检测系统输入的误差以及误差变化率,根据具体的模糊控制规则,实现参数的在线自整定过程。本文提出了一种基于模糊PID的控制方法,将模糊控制与传统的PID控制结合起来,从而实现精确控制地铁屏蔽门的运行。相比于传统的PID控制算法,采用模糊PID控制算法可以使地铁屏蔽门的运行曲线更加精确,对于地铁屏蔽门这种非线性、时变性的运动过程调速性能更好。
对于无刷直流电动机作为驱动装置带动执行机构运转的控制方法,很多学者开展了研究工作。文献[3]提出了一种粒子群-引力算法的模糊 PID 控制器设计方法,但是计算过程太复杂,运算时间过长,实际控制效果较差。文献[4]结合S函数构建了一个新型模糊控制系统模型,并将该系统模型应用在无刷直流电动机的控制上。文献[5]将无刷直流电动机的模糊控制的方法应用在了皮带传送系统中,为模糊控制应用在地铁屏蔽门上提供了一些参考。文献[6-7]提出了一种对于地铁屏蔽门的滑模变结构控制策略,也为地铁屏蔽门的模糊控制策略提出了一些参考。
站台屏蔽门的整个运动过程包括加速阶段、匀速阶段、减速阶段和到位阶段。为了防止夹伤乘客,滑动门的到位阶段要求速度足够小、控制精度要高[8]。根据轨道交通行业所制定的技术标准,为了保护乘客的安全,防止夹伤乘客,规定屏蔽门门体在运行过程中的最后100 mm的动能不能大于1 J,最大速度的动能不能大于10 J,并且整个开门或者关门的运行过程必须要控制在3~4 s之间,要在符合要求的前提下设定符合要求的屏蔽门滑动门的运动曲线。本文以地铁屏蔽门的开关门的运动过程为研究对象,以无刷直流电动机的运转为具体控制对象,设计一种将模糊控制和PID控制结合起来的控制的方法,并验证模糊PID控制相较于传统的PID控制策略的优良的调速性能。
1 无刷直流电动机的数学模型
在理想情况下,无刷直流电动机在两相导通星形三相六状态方式下运转工作,如果不计涡流和磁滞损耗,并且三相绕组完全对称,则电压平衡方程[9]为:

(1)
式中:ua、ub、uc——分别为定子每相绕组的电压;
ra、rb、rc——分别为定子每相绕组电阻;
t——时间;
ia、ib、ic——分别为定子每相绕组的电流;
ea、eb、ec——分别为定子每相绕组在切割磁感线的过程中产生的反电动势;
la、lb、lc——分别为定子每相绕组自感;
mbc、mac、mab——分别为定子每两相绕组间的互感。
电动机的转矩方程为:
(2)
式中:Te——电动机转矩;
ω——电动机角速度。
理想情况下,可以忽略粘滞摩擦的影响,则电动机的运动方程为:
(3)
式中:Tl——电动机负载转矩;
J——转动惯量。
2 无刷直流电动机控制系统的整体结构
无刷直流电动机控制系统主要由无刷直流电动机本体结构,电子换向装置,脉宽调制装置,转子位置检测、电流检测、速度检测装置以及电流PID控制器和模糊PID控制器组成,系统采用速度环和电流环2个反馈环路的双闭环控制,采用模糊自适应PID速度控制器取代传统的PID速度控制器。无刷直流电动机控制系统的整体结构图如图1所示。

图1 无刷直流电动机控制系统整体结构图
3 模糊自适应PID控制系统设计
利用MATLAB软件中的模糊逻辑控制箱,输入参数E(误差)以及EC(误差变化率);然后根据模糊控制规则表(图2),采用Mamdani模糊逻辑推理,将输入的2个参数量化到相应的论域;最后通过解模糊算法求出参数具体要变化的数值。基本论域均选取[-3,3]为变化范围,共分{-3,-2,-1,0,1,2,3}7 个等级。各变量的基本论域相对应的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},即{负大,负中,负小,零,正小,正中,正大}[10-11]。
采用重心法解模糊算法,根据下式可知,通过前一时刻的kp,ki,kd,以及模糊控制规则表算出的变化量Δkp,Δki,Δkd,可以计算出下一时刻的kp,ki,kd,从而实现PID控制3个参数的在线自整定过程。
kp=kp0+{Ei,ECJ}p
ki=ki0+{Ei,ECJ}i
kd=kd0+{Ei,ECJ}d
(4)
式中:kp——比例调节系数;
ki——积分调节系数;
kd——微分调节系数;
kp0、ki0、kd0——分别为kp、ki、kd3个参数的初值。

图2 模糊控制规则表
在本次设计的无刷直流电动机的整个控制系统当中,模糊自适应PID控制器是整个控制系统中的最重要的部分。对于算法的数学表达式可以用下式表示:

(5)
式中 :u(k)、u(k-1)——分别为k时刻和k-1时刻PID控制器的输出值;
Δu(k)——采样时刻与前一时刻输出值的增量;
e(k)、e(k-1)、e(k-2)——分别为k时刻、k-1及k-2时刻转速偏差采样值。
模糊PID控制算法的流程图如图3所示。

nr(k).k时刻电动机输入转速;n(k).k时刻电动机实际转速;ec(k).k时刻与k-1时刻的转速偏差变化。
4 系统仿真及仿真结果分析
根据上述的模糊PID控制理论,在MATLAB/Simulink软件中对无刷直流电动机进行仿真,电动机采用空载启动方式,电动机极对数为4,转动惯量J为0.017 3 kg·m2,额定转速为3 000 r/min,验证无刷直流电动机在传统PID控制与模糊PID控制下的动态响应性能。
为了实现对地铁屏蔽门整个开关门过程中的加速-匀速-减速-到位4个运动状态速度的精确控制,首先要在符合要求的前提下设定符合要求的屏蔽门滑动门的运动曲线,设计屏蔽门门体的运行过程要控制在3~4 s之间[10]。根据目标地铁屏蔽门滑动门的质量以及动能定理算出最后到位速度<0.2 m/s,最大速度<0.52 m/s,由此设计了屏蔽门关门速度曲线,主要包括加速部分、匀速部分和减速部分,如图4所示。因为该运动曲线是一个时变性曲线,所以考虑采用模糊PID控制策略提高屏蔽门的调速精度。为了满足该设计的速度曲线的要求,本文在MATLAB/Simulink软件上对屏蔽门的加速-匀速-减速-到位整个运动过程进行了仿真,并分别采用了传统的PID控制算法和模糊PID控制算法进行对比。根据门体的运行曲线,设计电动机的仿真工况。
从图4中可以发现,在屏蔽门运动的过程中,在1 s时电动机转速达到最大值900 r/min,在传统PID与模糊PID这2种控制方法下,目标转速与实际转速的最大差值分别为20 r/min和4 r/min,维持最大速度匀速时间为1 s,2种控制方法下的稳态误差分别为5 r/min和2 r/min,从2 s开始减速,在减速过程中的2种控制方法下的目标转速与实际转速的最大差值分别是15 r/min和3 r/min。故可知:模糊PID控制方法与传统PID控制方法下的仿真曲线尽管在开始时刻存在些许超调,但是很快就可以精确追踪目标转速曲线,而传统PID控制方法在加速和匀速的过程中响应时间过长,存在一定的滞后,并且稳态误差较大,在最后减速的过程中又产生了较大超调。所以经过本次仿真试验可以得到以下结论:模糊PID控制相较于传统的PID控制具有响应快、超调小、控制精度高等优点,将模糊PID控制算法运用到屏蔽门的控制系统中,对于屏蔽门的开关门过程的调速可以起到良好的效果。
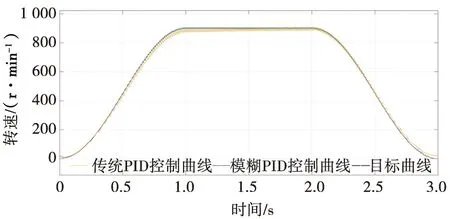
图4 屏蔽门关门速度曲线图
5 结论
本文针对轨道屏蔽门运动曲线的控制问题,将模糊控制理论与PID控制相结合,提出采用模糊PID控制器取代传统的PID控制器,并确定了各输入输出量的基本论域,根据电动机转速控制原理建立了模糊规则表,从而实现PID控制3个参数的整定。同时,在MATLAB/Simulink软件中分别建立了基于传统PID控制与模糊PID控制的无刷直流电动机调速仿真模型进行仿真,仿真结果表明:模糊PID控制在屏蔽门整个运动过程中的运行曲线跟踪性能良好,该控制方法可为轨道交通站台安全门的调速控制提供可靠的理论依据和方法。
猜你喜欢
恋爱婚姻家庭(2022年9期)2022-04-13
恋爱婚姻家庭·养生版(2022年3期)2022-04-11
防爆电机(2021年6期)2022-01-17
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
科学家(2021年24期)2021-04-25
成都信息工程大学学报(2021年6期)2021-02-12
石油化工建设(2020年1期)2020-08-24
电子制作(2019年16期)2019-09-27
电子制作(2016年21期)2016-05-17