低空无人机倾斜摄影测量实景三维模型构建
2022-05-09 02:42赵琪
兵器装备工程学报 2022年4期
赵 琪
(中国人民警察大学(广州), 广州 510663)
1 引言
倾斜摄影测量是通过无人机搭载相机,从左视、右视、前视、后视以及正视五个方向对地面进行拍摄,经过一系列的处理得到地面信息数据。无人机倾斜测量技术已广泛应用于人们生活与工作中[1],点云数据、数字正射影像图等均属于数字测绘产品。军用无人机遥控设备根据其控制方式,主要分为无线电遥控、自动程序控制和综合控制3种类型。无人机或小型飞机做局部地区测量,可以很精细描绘出地形图和数字地表模型,用于军事目标。以往通常仅可采用搭载单相机拍摄场景图像,倾斜摄影测量技术从众多角度利用多个传感器采集场景数据,令所采集场景信息更加丰富,可有效体现场景地面纹理信息[2]。低空无人机倾斜摄影测量技术具有自动化程度高、后期处理方便等优势,令所建立三维实景模型更加准确以及可靠[3]。低空无人机倾斜摄影测量技术所建立三维实景模型具有精度高、性价比高以及纹理真实的优势,将其应用于城市规划、建设智慧城市等众多应用中[4],可提升服务的精准性以及高效性。倾斜摄影测量是目前较为有效的获取地表信息的重要技术,影像获取质量决定了航空影像质量以及所建立三维实景模型质量[5]。
国内外学者针对无人机倾斜摄影测量建立三维模型研究较多,文献[6]提出了基于无人机倾斜摄影的建筑物三维建模方法,以拓普康猎鹰8号八旋翼无人机平台为例,通过分析该平台获取的低空摄影测量数据,利用Smart 3D软件对建筑物进行建模,该方法没有对图像信息进一步处理,测量的精度还需进一步加强。文献[7]提出了无人机摄影获取单木三维信息方法研究,基于倾斜摄影测量技术,以多旋翼无人机为数据采集平台,实现了孤立单木的三维点云模型重建。在此基础上,建立了单木三维信息量测算法。该方法算法存在缺陷,在建立图像相似区域三维模型时会出现误匹配问题,使构建模型的各检查点精度低。
为了解决上述问题,构建了低空无人机倾斜摄影测量实景三维模型,选取某高校综合楼作为对象,将左视、右视、前视、后视以及正视相机搭载于四旋翼无人机中,令无人机低空飞行,采集地面像控点数据以及倾斜影像数据,通过数据处理建立三维实景模型。通过实验验证所建立三维实景模型的建模精度,为低空无人机倾斜摄影测量后续应用提供广阔的发展前景。
2 基于低空无人机倾斜摄影的三维模型构建方法
构建低空无人机倾斜摄影测量实景三维模型,首先需采集地面像控点数据以及倾斜影像数据,通过纹理贴图等过程建立三维实景模型[8]。所建立三维实景模型可有效展示侧面纹理信息,侧面纹理信息可体现地物属性,地物地理位置信息利用航空定位定向系统(POS)技术获取。
2.1 模型构建方案
利用三维实景建模软件Context Capture实现数据处理以及实景三维建模,该软件可实现稳定运行[9]。构建实景三维模型首先需采集低空无人机倾斜摄影测量数据,所采集数据通过数据预处理后,利用所获取数据实施三维实景模型建立,搭建三维实景模型过程如图1所示。

图1 三维实景模型搭建过程框图
选取SIFT特征匹配算法实现影像特征向量匹配,利用所获取影像匹配结果同名点便于实景三维模型空中三角测量。选取光束法区域网联合平差实现内业数据处理[10],外方位元素控制点坐标数据以及初始值坐标数据利用像片POS姿态数据完成平差。在此基础上进行三维重建,通过无人机拍摄多视角图像后,可以恢复物体和摄像机在实际场景中的位置关系,有助于还原物体真实的三维形状[11]。
通过低空无人机倾斜摄影测量采集实景不同角度影像,利用纹理映射获取最佳目标影像于所采集的众多影像中,目标影像与三角网的配准利用不规则三角网以及影像的几何关系获取。将核线影像利用空三解算获取的外方位元素获取,核线影像具有较强的立体视觉效果[12]。原始影像与核线影像间坐标变换关系即核线重采样,采用双线性内插法实现核线影像重采样获取核线影像的灰度值。
2.2 图像采集
为了构建低空无人机倾斜摄影测量实景三维模型,需要使用低空无人机倾斜摄影技术采集图像。依据倾斜摄影测量几何原理可知:
(1)
式(1)中:a与b分别表示相机倾斜角度以及可视角度;h与d分别表示无人机飞行高度以及多视倾斜影像中地物与无人机水平距离最小值;D表示多视倾斜影像中相应地物水平距离最大值。
无人机至瞬时多视影像中心与无人机间的水平距离即水平地面与角平分线交点以及无人机间的水平距离[13]。通过式(1)计算结果,利用角平分线原理可获取下式:
(2)
无人机倾斜摄影所获取影像最大比例尺公式如下:
(3)
式(3)中:f表示相机焦距。无人机倾斜摄影所获取影像最小比例尺公式如下:
(4)
多视影像在低空无人机倾斜摄影拍照瞬间的平均摄影比例尺公式如下:
(5)
经过以上计算过程,实现地面区域的图像采集。但采集过程中图像会出现变形,需要对图像进行进一步处理。
2.3 图像预处理
低空无人机倾斜摄影拍照过程中容易造成影像几何变形,需要对所采集图像实施预处理,消除几何误差,提升所建立测量实景三维模型精度[14]。
相机透镜组出现缺陷将造成径向畸变,利用平面扫描仪的图像传感器获取运动所形成的平面,结合物方坐标系方程,可以获得畸变参数,修正径向畸变表达式如下:
Δxr=x0(k1r2+k2r4+k3r6)
(6)
Δyr=y0(k1r2+k2r4+k3r6)
(7)

摄影过程中出现切向畸变时,将造成像点位移径向与切向垂直情况。修正切向畸变表达式如下:
(8)
(9)
其中:P1与P2均表示相机镜头在低空无人机倾斜摄影过程中的切向畸变参数。
修正电荷耦合器件图像传感器(charge coupled device,CCD)面阵变形表达式如下:
Δxf=αx0+βy0b
(10)
Δyf=0
(11)
其中:α与β均表示低空无人机倾斜摄影测量相机镜头畸变差修正系数。
修正以上3种畸变完成相机畸变修正,通过式(6)到式(11)可得下式:
Δx=Δx+Δxd+Δxf
(12)
Δy=Δyr+Δyd+Δyf
(13)
通过以上过程实现低空无人机倾斜摄影测量畸变差纠正,完成数据预处理,得到数据建立特征向量。
2.4 SIFT特征匹配算法
为了在三维实景模型中建立特征匹配,需要对所获取数据建立特征向量进行计算。针对完成预处理所获取数据建立特征向量,每个特征向量有3个信息:位置,所处尺度、方向,由此可以确定一个SIFT特征区域。分别向SIFT向量L以及全局向量Q赋值128维方向参数以及60维方向参数,SIFT算法特征向量式如下:
(14)
式(14)中,ω表示相对权重因子。
将上述得到的数值输入全局纹理直方图中,设存在点(x,y),计算该像素点最大曲率,利用海森矩阵特征值较大的绝对值表示曲率,可得下式:
C(x,y)=F|α(x,y)|
(15)
式(15)中:α(x,y)表示较大的海森矩阵特征值,C(x,y)为曲率图像。
重叠度U就是重叠部分的面积U重和影像A的原始面积UA之比如下式:
(16)
经过处理图像可以进一步增加图像曲率精度。
建立中点为各特征点的对数极坐标,根据曲率图像,计算所获取直方图内相应位置累积曲率值为:
(17)
(18)
式中,q表示角度离散值。
对多摄像头摄影图像进行融合,分析图像数据,将相同数据部分作为目标点,将多图像融合,得到融合图像为:
(19)
式(19)中:L为图像数据数量,P(l)为真实场景,σx传感器偏移量,实现多图像融合。
利用加权函数平衡特征向量,采用反转的高斯函数加权各像素曲率值和角度离散值,获取权值函数如下:
w(x,y)=1-e-((qx-dxf)2+(qy-dyf)2)/(2φ2)
(20)
式(18)中,φ与(xf,yf)分别表示SIFT局部特征邻域加权时相同尺度以及特征点位置。
SIFT局部描述子利用加权函数提升邻域外区域信息展示能力[15],平滑过渡局部区域至全局区域。
归一化处理全局纹理向量令光照变化更加稳定,归一化处理式如下:
(21)
式(21)中,Qi为全局纹理向量。
具体利用SIFT算法提取图像局部特征过程如图2所示。

图2 SIFT算法提取图像局部特征过程框图
通过以上过程完成三维实景模型建立特征匹配。
2.5 纹理映射
为了获取三维实景模型纹理映射结果,需要建立以参数化作为目标的曲面。获取三维物体表面点(x,y,z)与二维纹理空间点(u,v)相应关系即纹理映射。纹理映射可轻松建立以参数化作为目标的曲面。
将隐式方程转化为参数方程式如下:
(22)
利用以上过程获取映射关系如下:
(u,v)⟺(m,n)⟺(x,y,z)
(23)
在范围[0,1]间利用一个或2个参数利用求值程序获取映射结果。通过参数域纹理空间相应关系获取三维实景模型纹理映射结果。
2.6 双线性插值方法
双线性插值扩展存在2个变量插值函数即双线性插值[16],该方法需实施线性插值至不同方向。
利用贝塞尔公式进行线性插值,中央差分格式处理贝塞尔公式,获取第二阶差分式如下:
(24)
式(24)中:t=(x-x0)/g,g表示格距。y-1、y0、y1、y2均表示相同直线上相邻点x-1、x0、x1、x2的值,x0与x1间x点的值用y表示。利用贝塞尔插值方法完成实景三维实景模型插值,需分别在x方向以及y方向上实施贝塞尔插值,获取最终插值结果,完成建立三维实景模型。
3 仿真测试
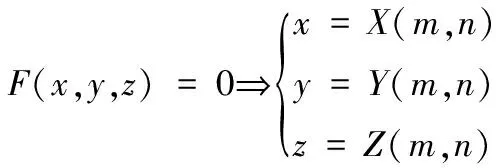
为验证所构建低空无人机倾斜摄影测量实景三维模型有效性,选取某房屋作为对象。选取OpenGVS软件作为本文方法的仿真软件,该软件实时三维(3-dimension,3D)图形开发软件,具有较高的仿真有效性。将左视、右视、前视、后视以及正视相机搭载于四旋翼无人机中,令无人机低空飞行。低空无人机倾斜测量采用HMJ-00D4000S型四旋翼无人机,将SONY A7相机搭载于无人机中。设置镜头航向重叠度为60%,旁向重叠度为30%,低空无人机倾斜摄影测量实景无人机以及相机参数如表1以及表2所示,部分相机曝光点坐标如表3所示。

表1 无人机参数Table 1 UAV parameters
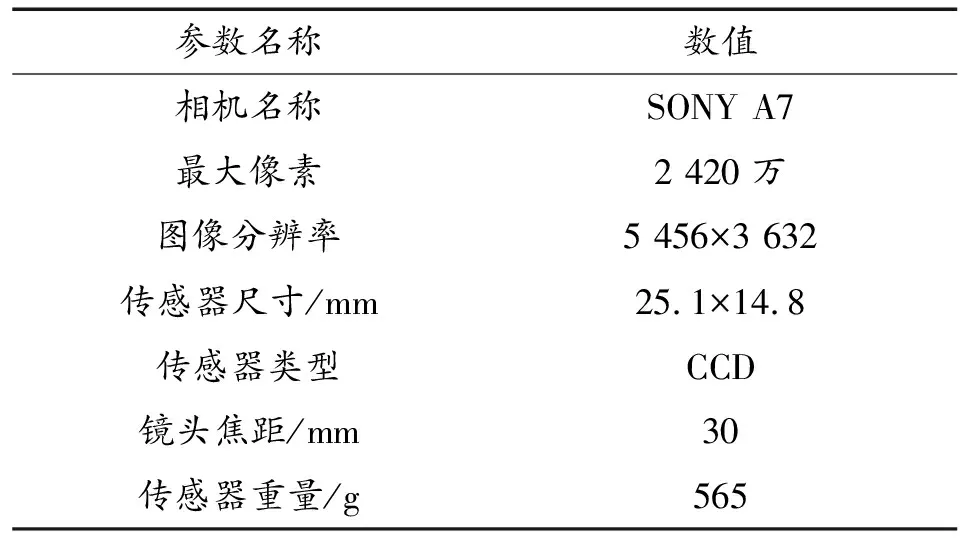
表2 相机参数Table 2 Camera parameters

表3 部分相机曝光点坐标Table 3 Part of the camera exposure point coordinates
从所采集海量低空无人机倾斜摄影所获取图像中随机选取一幅摄影图像如图3所示。

图3 低空无人机倾斜摄影图像
图片存在较多的相似区域,3种方法利用映射不同视角采集图像的特征区域,处理后的图像如图4所示。

图4 处理后的图像
从图3、图4的实验结果可以看出,文献[6]方法和文献[7]方法的图像处理过程中,图像处理过于模糊,而本文方法可以较好的处理图像,因为本文方法对所采集图像实施预处理,消除几何误差,并利用SIFT算法提取图像局部特征,可以准确完成图像的处理。说明本文方法使用SIFT算法对图像局部特征提取更为准确。
3种方法构建的三维实景模型图像如图5所示。
图5所示采用不同方法构建的三维实景模型可以看出,文献[6]方法和文献[7]方法所建立模型的纹理贴图效果较差,其模拟出来的图片出现不同程度的模糊。而采用本文方法可利用低空无人机倾斜测量建立三维实景模型,所建立模型逼真度高,纹理贴图效果明显,色彩鲜明,具有较高的三维模型建立有效性。因为本文方法构建了三维实景模型,可以准确的采集数据,使用SIFT特征匹配算法将采集的数据进一步处理,得到精准图像。

图5 不同方法构建的三维实景模型图像
从所建立三维实景模型中选取15个点作为检查点,获得检查点实际坐标与所建立三维实景模型检查点坐标。为直观展示本文方法的实景三维模型性能,采用本文方法与文献[6]方法以及文献[7]方法所得到的结果如表4所示。
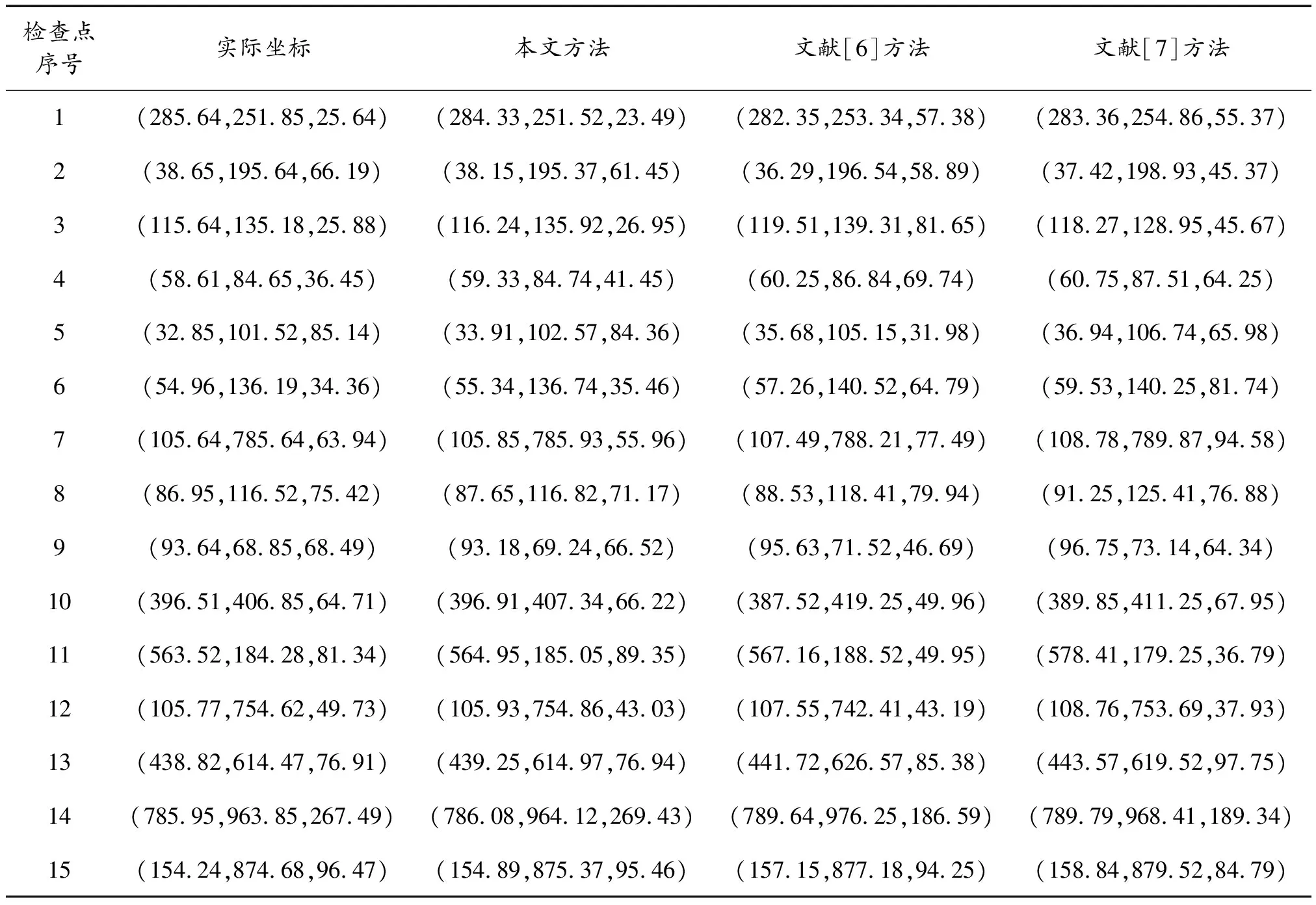
表4 检查点坐标Table 4 Check point coordinates
选取误差作为评定本文方法建立三维实景模型精度的评价指标,检查点实测坐标与模型坐标间的误差称之为残差。误差计算公式为:
(23)
式(23)中: Δvi、Δwi、Δzi分别为实际坐标与本文方法横坐标差值、纵坐标差值以及第三维坐标轴差值,n表示检查点数量。
统计采用3种方法建立三维实景模型各检查点的误差如表5所示。

表5 各检查点误差Table 5 Error comparison results
表5实验结果可以看出,采用本文方法所建立三维实景模型各检查点误差均低于0.05 m,相比于另2种方法,本文方法具有较高的三维实景模型精度,其模型的最终成果误差可达到5 cm以内,在目前国家要求的测绘精度中,可满足影像测量比例尺为1∶500精度要求。因为本文采用了双线性插值方法,利用贝塞尔插值方法完成实景三维实景模型插值,提高了采集精度。
4 结论
1) 所建立三维实景模型可满足摄影测量高精度需求。
2) 所建立三维实景模型有效提高了摄影测量技术的生产效率,缩短作业周期,快速获取地形相关数据。
3) 所建立三维实景模型质量较高,为城市精细化管理、景观虚拟展示等应用提供动态更新等功能,具有较高的参考价值。
猜你喜欢
江苏安全生产(2022年9期)2022-11-20
计算机系统应用(2022年4期)2022-05-10
华人时刊(2021年23期)2021-03-08
青年文学家(2020年10期)2020-04-27
电脑知识与技术(2018年18期)2018-11-01
汽车之友(2016年15期)2016-08-23
南方文学(2016年3期)2016-06-12
兵器知识(2016年2期)2016-01-29