
智能家居环境下六足机器人的设计与实现
2022-05-10 05:25张赛男邱晓荣
电脑知识与技术 2022年9期
张赛男 邱晓荣




摘要:该论文以六足仿生机器人作为研究目标,采用了STM32单片机的开源电子原型平台作为主要的控制系统。对机体结构、控制系统、各组成部件的工作原理做详细研究,设计制作一个基于STM32的六足机器人,再增加一些其他传感器,机器人可以在室内或室外进行环境的大气监测,为人们的生活提供方便。
关键词:智能家居;六足机器人;环境监测;STM32
中图分类号:TP368.1 文献标识码:A
文章编号:1009-3044(2022)09-0086-03
1 引言
随着现代化社会科学技术的迅速发展,机器人领域是极其重要的研究方向,而六足机器人作为多足机器人其中的一个典型代表,是当下具有重要价值的话题热点。六足机器人对各种环境都有极佳的适应能力和灵活性,因其自身体积小、质量轻等优点,具有良好的运动灵活性和强大的承载能力,可以在智能家居环境条件下进行工作,给我们的生活提供便利。
2 六足仿生机器人的基本介绍
2.1 结构组成及其分析
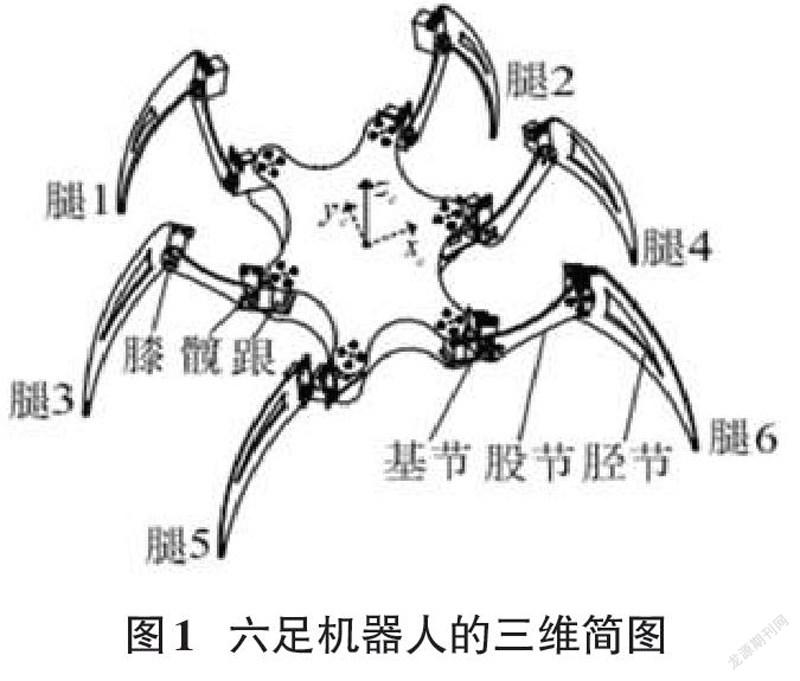
六足仿生机器人具有六条腿和躯体主干,六条腿的结构设计直接关系到机器人是否能平稳行走进而来适应环境。六条腿分别依次对称均匀地分布在机体的两个侧面,一条腿有三个运动关节,即三个自由度,从内往外分别依次是跟、髋、膝。每条腿的跟关节和躯体主干融合为一体,跟关节向与机体身垂直的方向进行转动,这样可以实现机器人的迈腿动作。髋和膝两个关节向与机体身平行的方向进行转动,可以实现机器人的抬腿动作。[1]
2.2 运动学及其步态分析
三角步态作为六足仿生机器人其中的一种常见的典型步态之一,其腿在进行三角步态的行走运动状态下,会存在不相邻的三条腿在相互交替以实现前后移动,三角步态是将机器人的六条腿一共分为两个组,第一组是由腿(1,4,5)组成,第二组是由腿(2,3,6)组成,每一组都可以构成一个三角形,并且依靠驱动可以完成支撑和摆动。[2]如果机器人在运动状态的时候都会有四条腿正在处于支撑状态,不相邻的两条腿正在处于摆动状态,这就是六足机器人的四角步态。三角步态的特殊表现形式是横向步态,当它正在处于横向步态的运动时,腿(3,4)都会具有多足哺乳动物踢腿的步态行走的特征,剩余的腿(1,2,5,6)也都会拥有多足爬行昆虫的波动行走的特征,[3]对横向步态的进一步探索,对于它在各种环境中进行全方位的行走移动具有极大的意义。
3 六足机器人设计制作的总方案
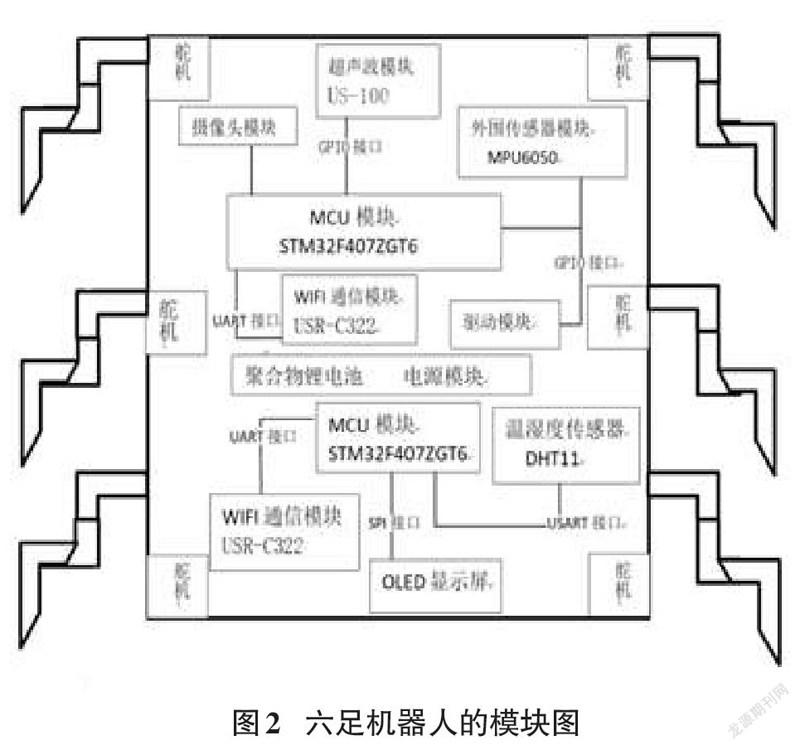
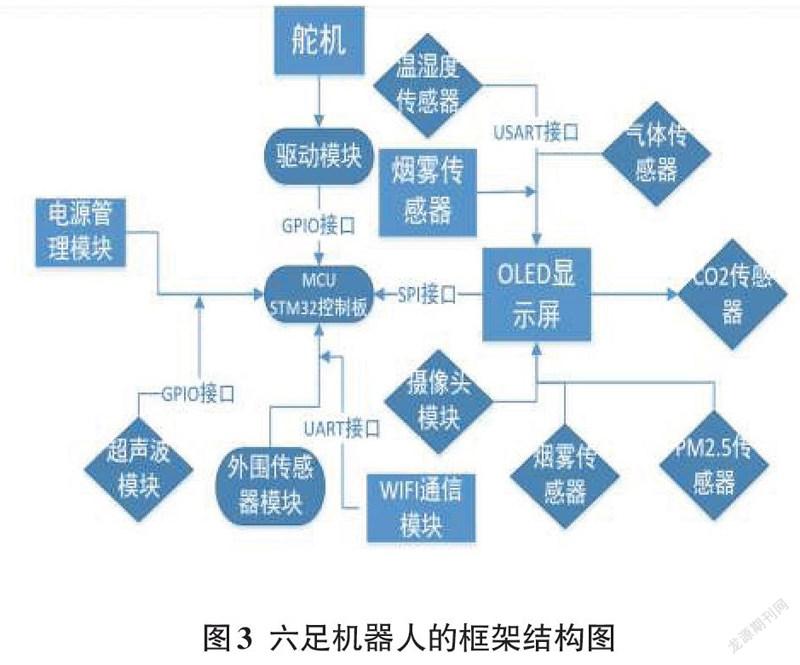
六足仿生机器人的控制板设计选择了嵌入式作为主要的处理系统,将单片机STM32应用为该机器人的控制器,控制板、电路、电池、舵机等安装在中间位置组成了机身,最上层安装肢体和其他传感器模块。[4]本机器人是锂电池供电,并且可以为舵机、控制板以及其他的模块供电。当开关通电之后,六足机器人处于站立状态,电源灯指示灯显示正常。驱动模块和舵机可以控制其进行运动,方便进行驱动利于实验[5]。
为了让六足机器人完成温度感应和环境监测等实验任务,运用基于ZigBee的Z-stack协议,将其嵌入到设备中。环周围环境中的温湿度信息会通过DHT11模块传输给STM32控制板,并通过摄像头模块采集周围环境信息的视频图像,然后,主控板会再将采集到的图像信息运用Wi-Fi模块传输到主控板,主控板会通过信息进一步控制六足机器人的行走路径,对周围环境中的信息进行下一步的探测。本实验制作对于室内而言,可对家居装修进行环境监测,监测室内的甲醛含量,保证安全健康,同时也可监测烟雾、液化气、天然气、甲烷等气体,当有害气体达到一定值进行火灾报警,有一定预防火灾的安全作用。
1)主控模块
本六足机器人的实验设计制作选择了STM32F407ZGT6作为核心控制器,此单片机具有极高的性能、丰富合理的外形设计,低功能消耗,合适的价格。
2)ZigBee
ZigBee是一项近距离、低成本、低功耗的无线网络通信技术,并且其具有兼容性强大、信息容量大、安全并且可靠性高、更为便捷的优秀特点。无线传感器网络在此实验中是由ZigBee与各种传感器两者共同组成的,因此,机器人可以做到自动采集并且分析和处理各种数据,并且能够在主控板和终端之间高效率的双向传送数据内容。
3)驱动模块
其六足机器人实验的运动依靠的是舵机驱动,此模块操作起来方便,性能好,更稳定。
4)舵机
SG90 舵机转动的角度是由调整 PWM波的脉冲宽度来决定的。六足机器人的舵机驱动以设定相应定时器的不同端口来控制舵机,其脉冲宽度与舵机的转角相对应,该舵机旋转角度为0°~180°。每一条腿的关节处都有舵机,舵机的作用是驱动关节实现转动,六个舵机固定在六个定点 ,驱动机器人实现肢体的前进和后退移动行走,其中两个舵机在每支腿的连接躯干处,两个舵机各有所用,一个用来控制足的转动,另一个用来控制足的起来和落下。还有一个舵机用来连接支撑部分,这样就可以完成下半部分足的起来和落下。整个系统共由18路舵机组成,一个足则需要三个舵机,帮助机器人实现正常的运转。
5)外围传感器
MPU6050外围传感器是由两个模块(三轴陀螺仪和三轴加速度计)共同组成的一款高性能的六轴传感器,其模块主要用于测量姿态角和加速度,并且支持姿势识别、画面的放大和缩小、滚动以及感应等功能,其FIFO执行方法,利于降低系统的功耗。
6)超声波测距模块
在检测六足机器人与障碍物的距离的时候,共需要位于转接板的三个不同方向(左中右)的三个测距模块进行测量。US-100超声波测距模块,它拥有灵敏度很高以及抗环境干扰性能好、工作起來稳定并且可靠的优点。本实验中测量六足机器人与障碍物的路程是通过高电平的持续时间测量出来的。如果设定六足机器人躲避障碍物的安全间距为0.5米,即当障碍物和它之间的距离小于0.5米时,会驱动舵机的PWM信号进行自减,驱动电机减小速度,机器人慢慢减速前进,因此,六足机器人就完成了它的自动避障功能。
7)温湿度传感器
DHT11温湿度传感器是数字采集和传感的一种复合类型的传感器,其体积小,并且拥有反应速度效率快、很强的抵抗外界能力以及极高的性价比,极低的功能消耗、较高的安全稳定性等优秀特点。
8)Wi-Fi模块
USR-C322是一款超低功耗WIFI模块。体积小,可一键联入Wi-Fi网络,速度更快、完美解决智能家居应用中的联网操作复杂的问题 。该传感器体积小,安全性能更高,并且容易焊裝、工作电压低,低功能消耗,数据传输速度快!
9)OLED显示屏
OLED显示屏用于显示六足机器人的参数指标数据和状态信息以及环境实时信息,其面积仅为LCD屏幕的1/3,其具有厚度薄、质量小、视角范围广阔以及响应速度快的优点。
10)二氧化碳(CO2)传感器
JXBS-3001二氧化碳传感器采用的是单光源、双通道探测器,半导体传感器探头作为核心检测器件;不仅安全可靠而且外观美观,安装方便。其拥有信号稳定、精度高、高灵敏度、测量范围广泛、使用方便、传输距离远等优点。该传感器不仅防水也防腐蚀,即便是在恶劣的环境条件下,也可以检测到稳定并且可靠的数据信息。
11)MQ2烟雾传感器
MQ2传感器适用于气体探测的一款多种气体(液化气、氢气、苯和烷、酒精和烟雾)监测仪器,其更加在家庭的气体泄漏监测中适用,拥有极其广泛的监测范围、稳定性强且寿命时间长、组成的电路简单以及抗干扰性能良好等优点,可以排除其他刺激性烟雾的干扰。
12)MQ4气体传感器
MQ4是对于甲烷、天燃气拥有很高灵敏度的一种气体传感器,是一种应用于家庭、工业的探测装置,其优点是驱动电路较为简单,长时间的使用寿命和稳定性可靠以及快速响应。
13)甲醛气体传感器
CJ-01-SH20甲醛传感器在对空气中甲醛的含量进行探测时,运用的是电化学原理,因此其具有良好的可靠稳定性,灵敏度优越、较强的抵抗干扰的能力等优点,甲醛传感器在空气质量设备的监测、换气系统以及智能家居环境中的应用等场所中适用范围较为广泛。
14)激光PM2.5传感器
DSL-08传感器是一款在颗粒物上产生散射光的激光数字式传感器,此传感器含有激光器和光电接受组件,因此光可以通过光电接受器转变成为电信号,并且PM2.5和PM10的质量浓度以及PM0.3~PM10的粒子个数,可以通过特殊的算法计算出来。其体积小巧,更方便安装在机器人上,监测速度也快,产品性能好也防干扰,检测数值稳定准确。
4 结束语
本文基于六足机器人的结构进行设计制作,其实验样机系统的功能已经基本实现,其地形适应力较强,运动较为灵活,在非结构化非规则步态的地形中可以稳定行走,同时,也具有负载能力,在六足机器人上搭载环境监测相关的传感器和其他设备,拓展其在智能家居方面的应用功能,从而服务于我们的日常生活,并且,对六足机器人在现实生活中的应用,以及对于今后的研究工作中有着更深的影响意义。
参考文献:
[1] 王超.基于STM32的六足机器人控制系统研究[D].西安:长安大学,2020.
[2] 李俊敏.基于STM32的六足机器人运动控制系统研究[J].河南科技,2019(25):32-34.
[3] 陈刚.六足步行机器人位姿控制及步态规划研究[D].杭州:浙江大学,2014.
[4] 李程.六足机器人控制系统设计[D].秦皇岛:燕山大学,2016.
[5] 王蕾,姚权允,邓博轩,等.基于STM32的六足机器人设计与实现[J].产业与科技论坛,2018,17(9):68-69.
【通联编辑:梁书】
猜你喜欢
电子制作(2019年19期)2019-11-23
电子制作(2018年1期)2018-04-04
中国资源综合利用(2017年4期)2018-01-22
公民与法治(2016年4期)2016-05-17
中国资源综合利用(2016年12期)2016-01-22
河南科技(2014年7期)2014-02-27
