温度补偿的延迟线型SAW应变传感器
2022-05-13 14:31杨小杨朱加良电子科技大学电子科学与工程学院四川成都673中国核动力研究设计院四川成都603
压电与声光 2022年2期
杨小杨,黄 飞,彭 斌,何 鹏,朱加良(. 电子科技大学 电子科学与工程学院,四川 成都 673;.中国核动力研究设计院,四川 成都 603)
0 引言
声表面波(SAW)是一种沿着衬底表面传播的弹性波,其传播特性会受外界因素(如温度、力等)的影响。因此,基于SAW的传感器可监测环境温度、湿度、压力和应变。与传统传感器相比,SAW传感器具有耐高温、抗辐射、便于无线测试及信号处理简单的特点,可应用于一些恶劣的测试环境。根据监测物理量的不同, SAW传感器分为温度传感器、湿度传感器和应变传感器等。SAW应变传感器在汽车工业[1]、航空工业[2]及桥梁铁路监测等领域已得到广泛应用。SAW应变传感器分为谐振器型和延迟线型,谐振器型传感器的谐振频率f0受应变影响而发生变化,延迟线型传感器的延迟时间t0受应变影响而发生变化。与谐振器型应变传感器相比,延迟线可对传感器进行编码,更利于多点分布式应变测量。
由于SAW器件对温度变化的响应很灵敏[3],因此,在温度波动的环境中,SAW传感器输出信号(包含温度和应变响应)将导致应变测试结果与实际结果偏差较大。实际应用中,SAW应变传感器需要排除温度的影响而得到可靠的应变信号。针对此问题,中国科学院声学研究所提出了一种外接负载的差分结构SAW 应变传感器设计方法,测试灵敏度可达0.019 6 (°)/με[4]。
本文采用直接式差分结构SAW应变传感器设计方法。首先设计并制作了SAW延迟线,研究了其对应变的响应特性,然后针对温度对器件应变特性的影响,研究了差分结构对温度和应变的响应特性。
1 实验和方法
本文设计的SAW应变传感器结构采用反射型SAW延迟线,如图1所示。衬底材料选择厚0.5 mm、128°Y-X切向的LiNbO3。叉指换能器(IDT)的叉指宽度和指间距均为3 μm,器件尺寸为8 mm×12 mm×0.5 mm。本文设计了IDT对数分别为10对、20对、30对的SAW延迟线(记为SAW1、SAW2、SAW3),其他参数相同。反射栅1与IDT的距离l1=1 152 μm,反射栅2与IDT的距离l2=6 720 μm。采用光刻剥离工艺在衬底上制备图形化的薄膜电极,首先沉积厚20 nm的Ti作为粘附层,然后沉积厚100 nm的Au薄膜。
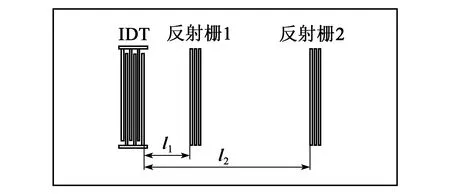
图1 反射型SAW延迟线结构示意图
采用矢量网络分析仪(VNA,Agilent N5234A)测试SAW延迟线的时域特性,采用悬臂梁结构测试不同应变下SAW延迟线的响应特性。首先将SAW延迟线粘在一个厚3 mm、长宽分别为100 mm和30 mm的TC4钛合金板表面上,然后将合金板一端固定构成悬臂梁,另一端施加力,从而对器件施加一定大小的应变。测试前先用标准应变片对悬臂梁的应变大小和挠度进行标定。为了测试不同温度下的应变特性,将悬臂梁固定在高温炉内(见图2),然后在不同温度和应变下测试器件的响应。
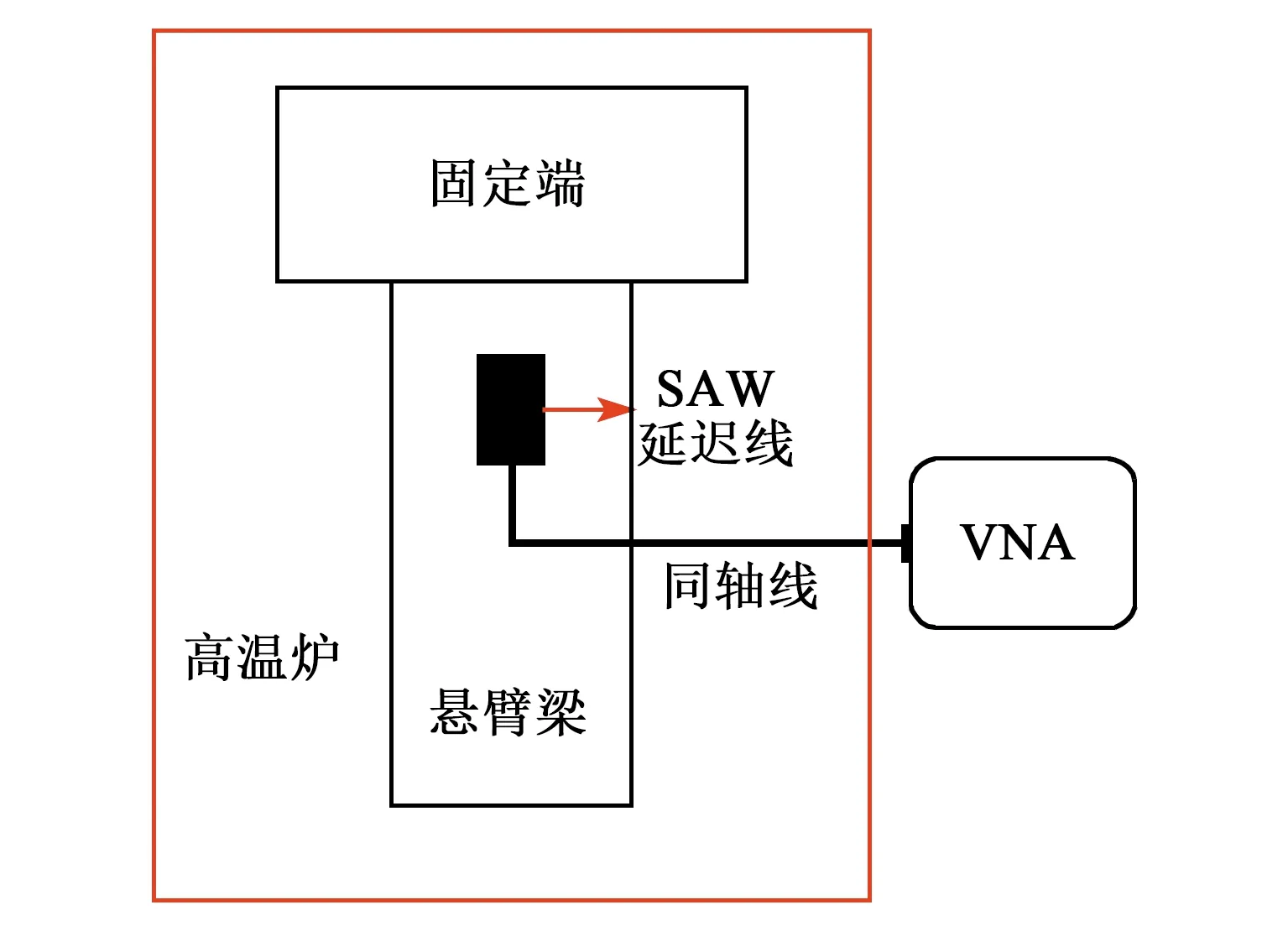
图2 应变测试装置示意图
2 结果和讨论
图3为3组不同IDT对数SAW延迟线的时域响应特性测试结果。由图可看出,3个SAW器件在0.621 9 μs和3.440 7 μs处均有2个较强的反射峰。器件基底材料LiNbO3声速为3 840 m/s,因此,理论上反射栅1的反射信号应出现在0.6 μs,反射栅2的反射信号应出现在3.4 μs。对比理论计算值和实验数据可得,图3中0.621 9 μs的反射峰是反射栅1的反射信号,3.440 7 μs的反射峰是反射栅2的反射信号。此外,在1.385 7 μs处还出现了1个较小的反射峰,这是由于SAW延迟线基片的左边缘反射导致的,一般可在基片边缘涂覆吸声材料进行消除。
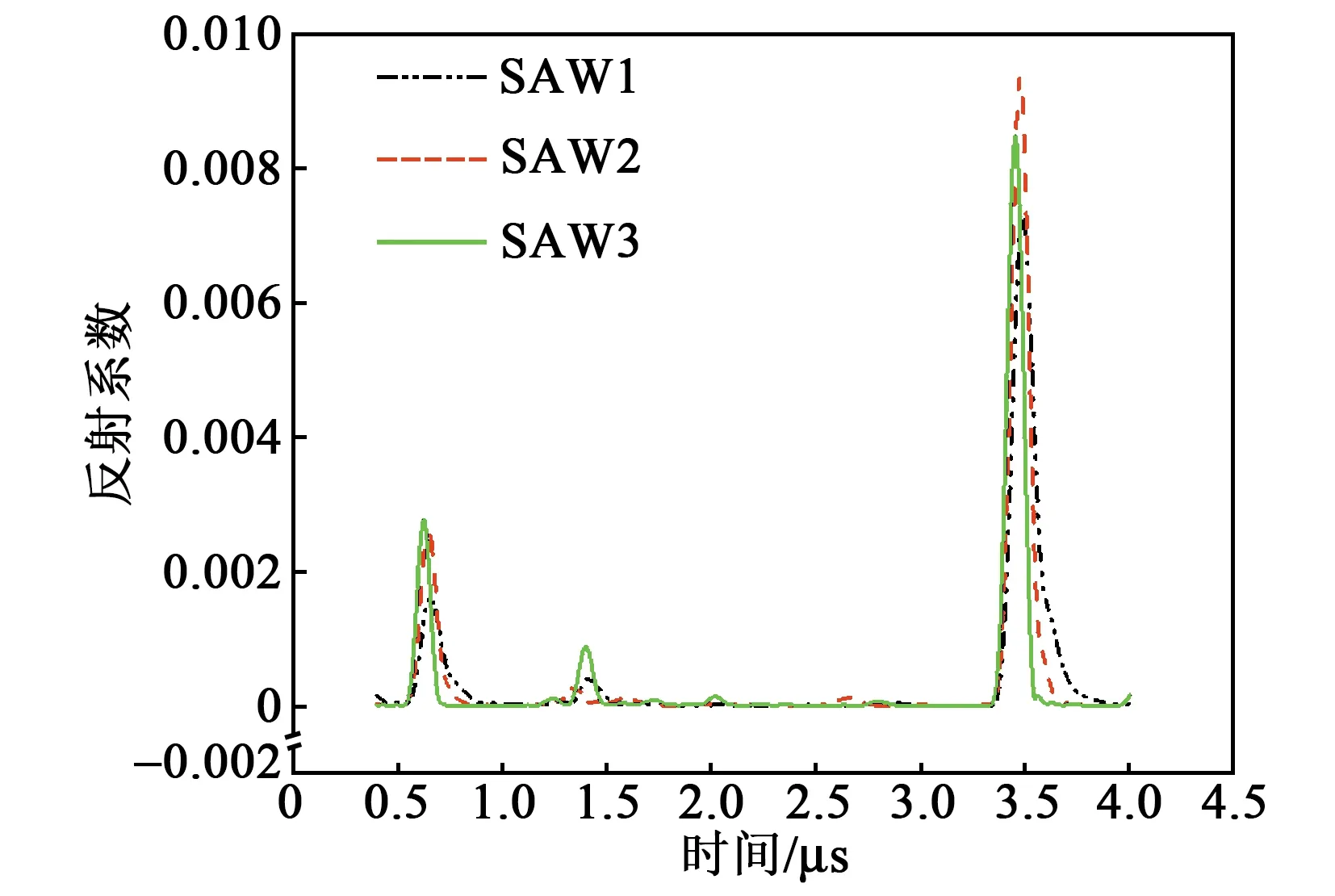
图3 SAW应变传感器的时域响应
对比3个器件的测试结果发现,3个器件的时域峰宽不同,其中,SAW1的峰宽最大,SAW3的峰宽最小,这表明IDT对数越多,时域峰宽越大。这是由于时域上的反射峰起点基本一致,终点和IDT对数有关。IDT对数越多,脉冲宽度越大[5],时域上反射峰就越宽。
为了用SAW延迟线的时域特性来表征应变,本文把反射栅1、2反射信号的时间差定义为绝对延迟时间t,即:
(1)
式中vs为SAW传播速度。
将有应变延迟时间t(ε)和无应变时延迟时间t(0)之差定义为相对延迟时间Δt(ε),即:
Δt(ε)=t(ε)-t(0)
(2)
式中ε为SAW延迟线应变大小。
图4为连续3次测得不同应变下SAW1延迟线的延迟时间。由图可看出,3次测试结果基本吻合,表明器件重复性较好,且具有较好的稳定性。同时,延迟时间和外加应变呈线性变化的趋势。对图4中测试数据进行线性拟合,得到其线性度为0.995 82,这表明所制备SAW延迟线的延迟时间随应变的增大而线性增大,这是由于应变增大,两个反射栅的间距增加,从而延迟时间增大。
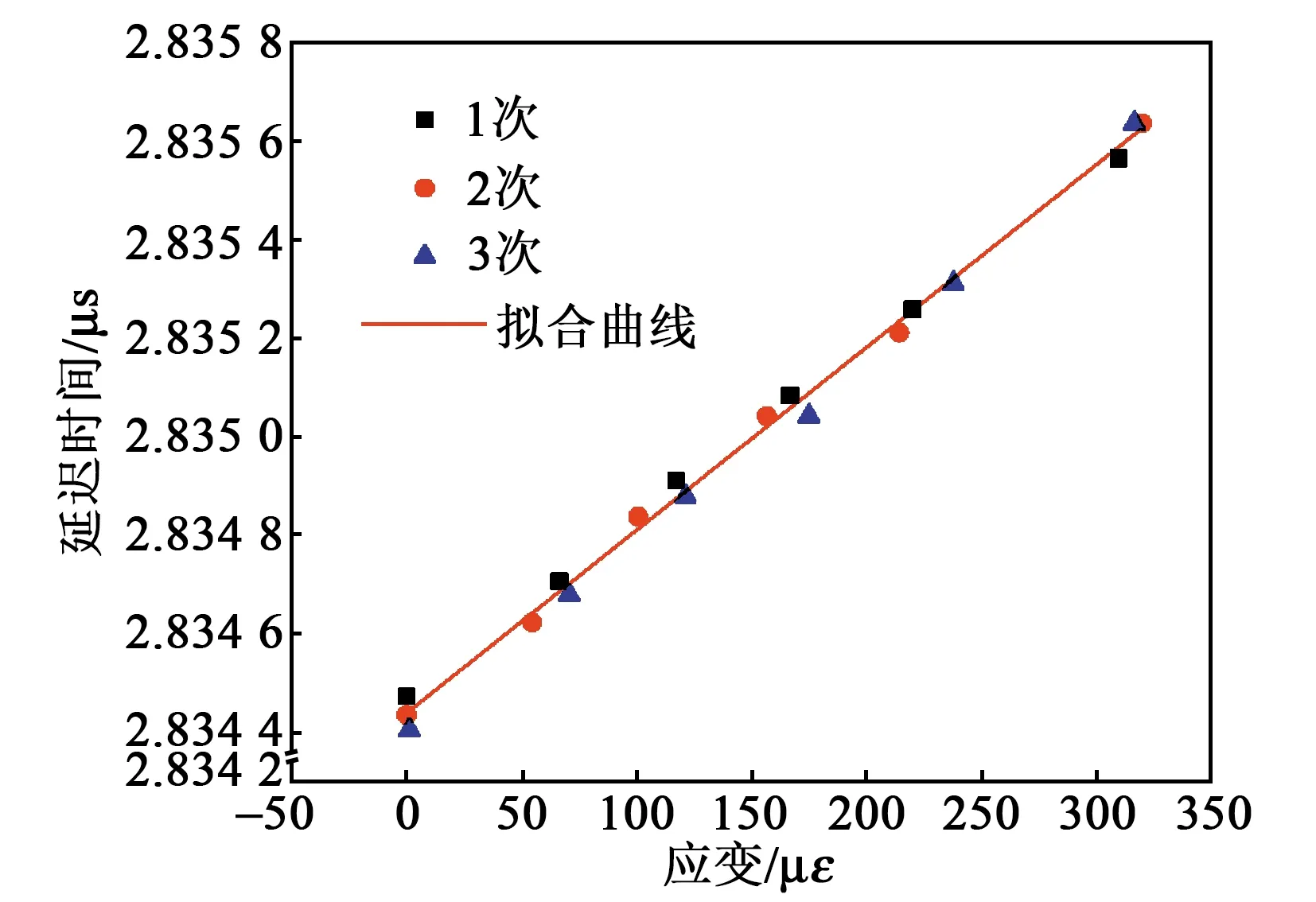
图4 SAW1器件延迟时间和应变的关系
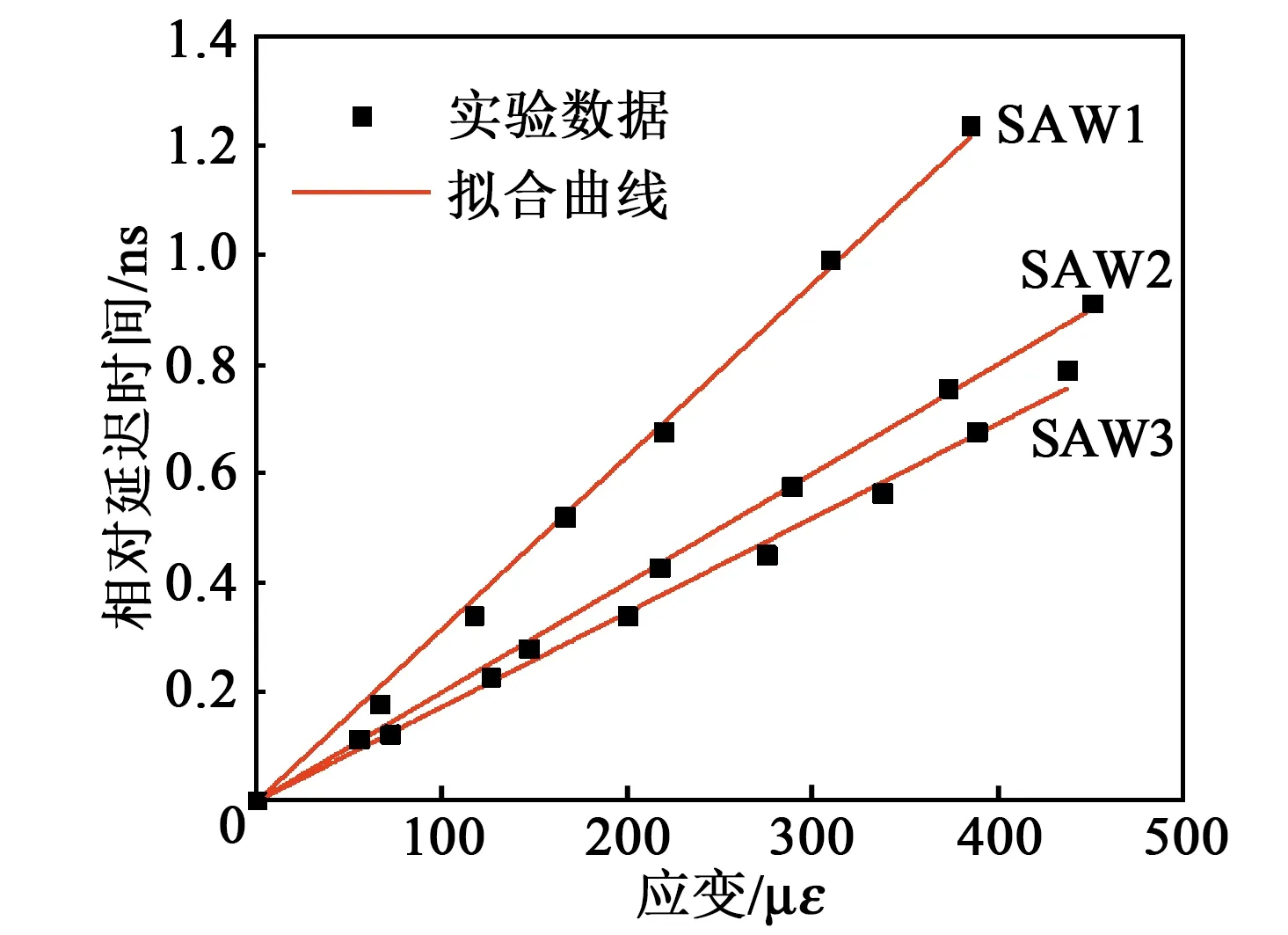
图5 SAW延迟线相对延迟时间和应变的关系
图5为SAW1~SAW3延迟线的相对延迟时间随应变的变化曲线。由图可知,3个SAW延迟线的延迟时间都随应变增大而线性增大,但其灵敏度不同。将实验数据进行线性拟合后可得SAW1的应变灵敏度为3.256 6 ps/με,SAW2的应变灵敏度为2.046 7 ps/με,SAW3的应变灵敏度为1.727 5 ps/με。这表明IDT对数越多,器件应变灵敏度越大。这种现象可能和器件的脉冲响应机理有关[5],当IDT对数增加时,时域上的反射峰越宽(见图3),外加应变时反射峰-峰值的位置变化也相对增大。故IDT越多,器件的应变灵敏度越大。因此,选择应变灵敏度最大的器件SAW1进行进一步的研究。
Donohoe等[6]研究发现,SAW谐振器的应变特性和应变方向与传播方向的夹角有关。为了探究本文SAW延迟线应变特性和夹角的关系,本文把SAW1器件以不同角度粘贴在悬臂梁上,如图6(a)所示。然后研究不同粘贴角度时SAW延迟线对应变的响应,测试结果如图6(b)所示。由图6(b)可看出,粘贴角度对SAW延迟线的应变特性影响较大。0°时相对延迟时间随应变的增大而增大,灵敏度(拟合直线斜率)最大;90°时相对延迟时间随应变的增大而减小。这是由于0°时,施加应变后,传播距离沿传播方向变大,延迟时间变大;90°时施加应变后,传播距离沿传播方向变小,延迟时间变小。
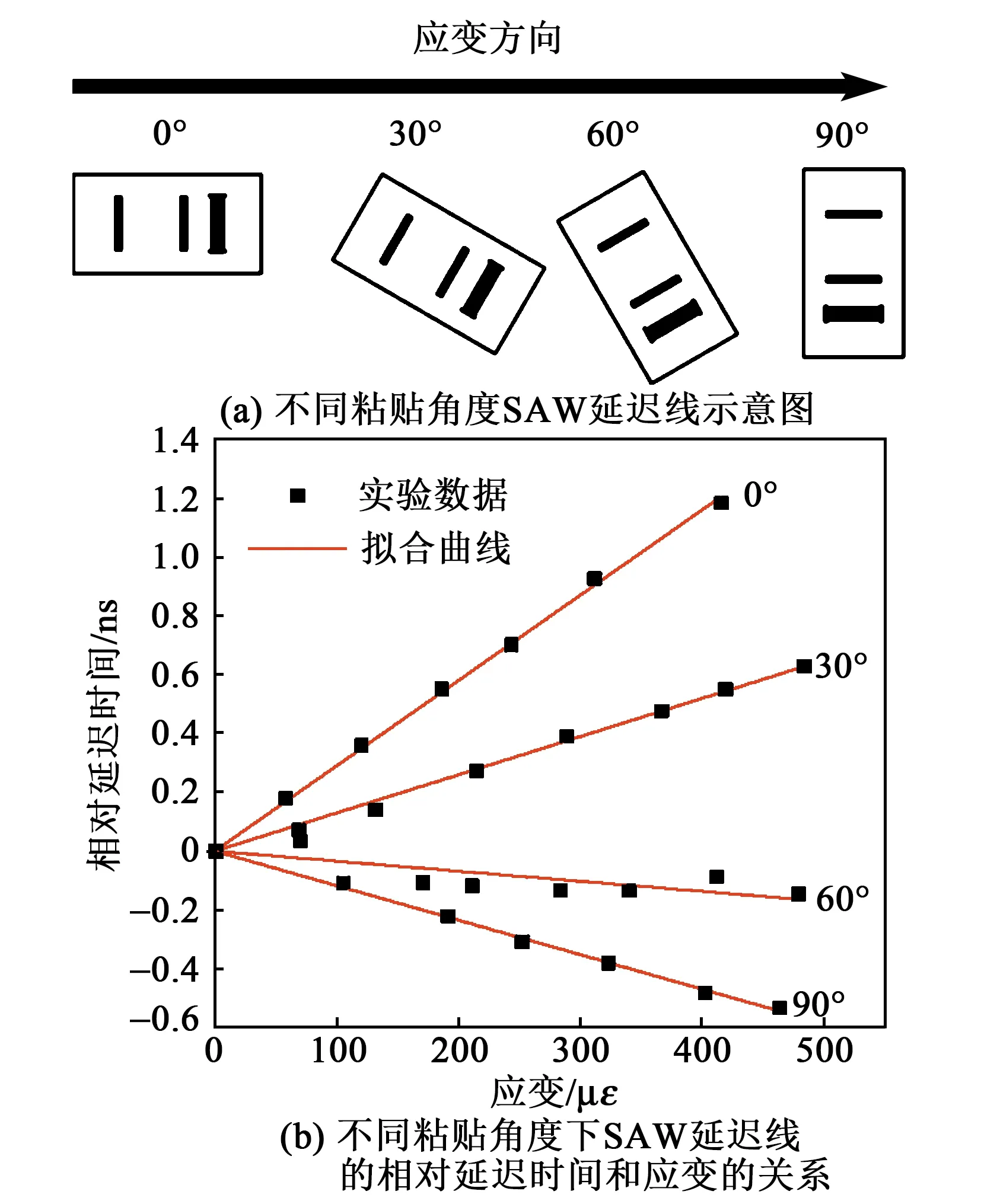
图6 不同粘贴角度下器件特性
由于LiNbO3基底的SAW器件对温度的响应灵敏度较高[7],在温度变化的环境中,测试应变时必然会受到温度的影响。由图6(b)可发现,对于两个相同的SAW延迟线,受到的应变大小相同而方向不同时,其输出信号也不同,但其随温度变化相同[8]。基于上述特性,本文用2个相同的SAW1器件,以灵敏度相差最大的角度(即0°和90°,SAW1器件分别记为SAW1(0°)和SAW1(90°)器件)粘贴在同一悬臂梁上,研究不同温度下其相对延迟时间差与外加应变的关系如图7(a)所示。
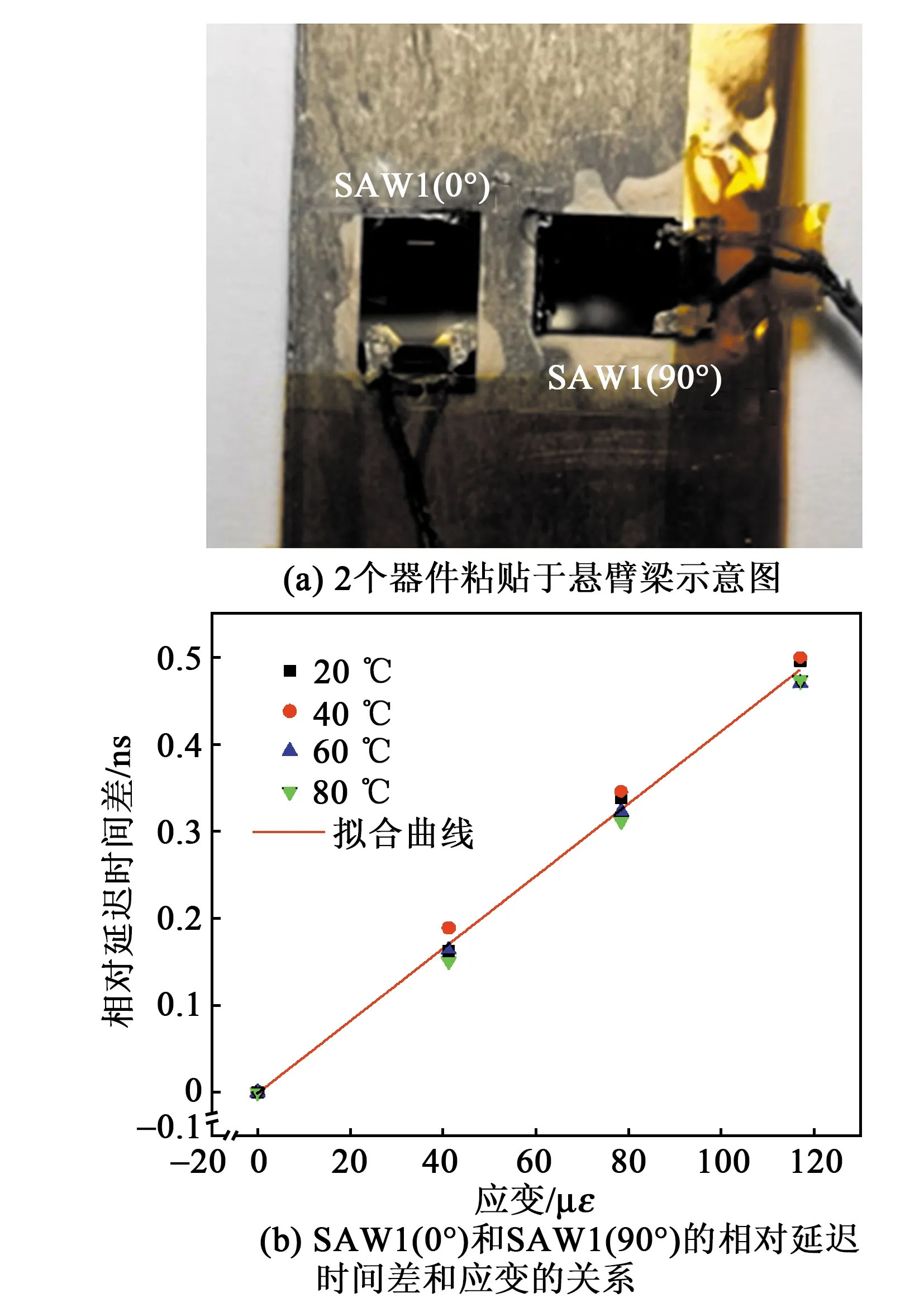
图7 差分结构的SAW延迟线应变特性
图7(b)为SAW1(0°)和SAW1(90°)2个器件的相对延迟时间差。由图可以看出,在0~80 ℃的温度范围内,不同温度下两个器件的差分信号基本一致。这表明此差分结构可消除温度的影响,当温度变化时也可获得准确的应变信号。由图还可以看出,随着应变的增加,差分信号也线性增加。线性拟合后,其线性度为0.995 72,灵敏度为4.160 6×10-3ns/με。测试结果与拟合直线的最大偏差为2.7%,这表明此差分结构可获得较准确的应变信号。
3 结束语
本文采用128°Y-X切向的LiNbO3设计并制备了反射型延迟线结构的SAW应变传感器,探究了该SAW延迟线的应变特性,以及差分结构消除温度影响的方法。实验结果表明,SAW延迟线的IDT对数越多,时域上的反射峰越宽,SAW延迟线的应变灵敏度越高。SAW延迟线的应变灵敏度受应变与传播方向间夹角的影响,0°时相对延迟时间随应变的增大而增大,90°时相对延迟时间随应变的增大而减小。采用相互垂直排布的SAW延迟线构成差分结构,在0~80 ℃温度范围内,差分信号基本与温度无关,测试结果与拟合直线的最大相对误差仅为2.7%。本文研究的这种差分结构的SAW延迟线可应用在应变测试中,以降低温度对应变测试的影响。
猜你喜欢
电声技术(2022年7期)2022-09-23
网络安全与数据管理(2022年1期)2022-08-29
上海师范大学学报·自然科学版(2022年3期)2022-07-11
科技视界(2020年24期)2020-08-26
科技视界(2020年22期)2020-08-14
网络空间安全(2020年1期)2020-05-25
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
宇航计测技术(2019年1期)2019-03-25
计算机应用(2016年10期)2017-05-12
中国新通信(2016年11期)2016-08-09