
悬臂式掘进机自主定位导航技术研究与试验
2022-05-14 02:49崔建勇
机械管理开发 2022年3期
崔建勇
(山西古县西山登福康煤业有限公司,山西 临汾 042400)
引言
悬臂式掘进机是煤矿巷道掘进的核心采掘设备,以人工操作为主,智能化水平和掘进效率不高。悬臂式掘进机在煤矿井下综掘工作面使用时面临的困难如下[1-3]:工作面工况复杂、粉尘浓度高、照明度差,导致掘进机驾驶员视野受限,巷道成型质量差;掘进时存在瓦斯超限、煤岩坍塌的风险;采、掘、支动作不匹配,掘进效率低下。因此,悬臂式掘进机的智能化、协同化发展是煤矿综掘工作面设备发展趋势。悬臂式掘进机智能掘进时,机身位姿精确测量、轨迹自主导航成为关键问题。近年来,国内外专家基于全站仪、惯性导航、电子罗盘、机器视觉、iGPS 定位、空间交汇测量、超宽带技术、激光导向等理论和技术对悬臂式掘进机位姿进行测量,获取姿态角和相对位置,以实现掘进机的自动化、精准化截割。实际应用发现,使用单一位姿检测方法难以实现悬臂式掘进机位姿精准测量,实现完全的智能化、无人化掘进存在一定的差距。本文以综掘工作面悬臂式掘进机为研究对象,在介绍其工作特性的基础上,重点研究基于双目视觉与惯导相结合的掘进机定位技术,并搭建、完成位姿试验平台,验证所研究技术方案的可行性。
1 悬臂式掘进机定位需求分析
以悬臂式EBZ260 型掘进机为例,其机械部件主要由截割部、回转部、行走部、装载部、智能定位系统及机架组成。悬臂式掘进机掘进过程中,机身需左右移动,截割臂带动截割头按照截割轨迹进行截割,根据要求截割拱形、矩形巷道。截割过程中,机身位置固定不变,截割完一个既定轨迹后,机身按照实际工况左右移动[4]。因此,悬臂式掘进机掘进时的定位需求为:断面截割时,机身需左右移动;负载运行时,机身位置保持不变;行走时,为履带式行走模式,移动速度较慢,但机身姿态及导航角变化频繁。
2 悬臂式掘进机定位系统分析
悬臂式掘进机自主定位导航控制系统总体方案如图1 所示,利用双目视觉原理精确测量掘进机位姿,构建捷联惯导自主定位控制系统,实现悬臂式掘进机自主位姿精确测量。结合煤矿井下综掘工作面实际工况,设置双目相机内参数,利用双目相机采用张正友标定法获取巷道内棋盘格图像,采用880 nm红外LED 标靶表征掘进机位姿图像特征,并进行畸变校准。对完成畸变校准的图像进行特征提取、特征匹配,利用高斯拟合方法获取图像光斑中心点坐标,利用三角测量方法实现光斑中心点二维坐标到三维坐标的映射。最后利用迭代临近点方案实现特征图像的精确估计,即利用双目视觉原理完成对掘进机机身位姿的精确估计[5-6]。捷联惯导自主定位控制系统与悬臂式掘进机刚性连接,利用捷联惯导的三轴陀螺仪、三轴加速计分别获取三轴角速度和三轴先加速度并进行误差补偿和位姿初值初始化。对获取的掘进机位姿参数进行指令解算、姿态角计算、速度位置计算,获取精确的掘进机实时位置、位姿、速度、加速度等信息并与双目视觉单元获取的数据进行校准、滤波,最终输出掘进机实时位姿状态。
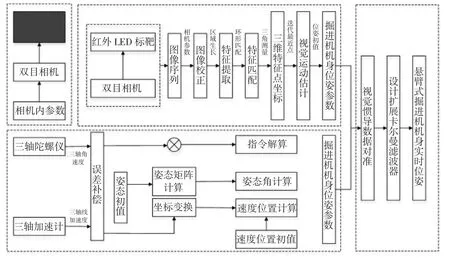
图1 悬臂式掘进机自主定位导航控制系统总体方案
3 悬臂式掘进机自主定位试验
悬臂式掘进机自主定位试验分为位姿试验、导航试验两部分,在实验室构建试验环境,验证基于双目视觉、捷联惯导技术相融合的掘进机实时定位方案的可行性和正确性,并分析位姿误差。
3.1 位姿试验
悬臂式掘进机位姿试验方案如图2 所示,分为静态试验、动态试验两部分,分别完成试验平台的搭建、特征图像获取、特征图像处理、试验结果分析及测量误差分析。

图2 悬臂式掘进机自主定位导航控制系统位姿试验方案
3.1.1 静态试验
采用的双目相机为D1000-IR-120/Color 及其配套软件、EBZ260 型4∶1 悬臂式掘进机模型、红外LED 标靶为SE347-003。试验时,利用双目相机图像处理软件获取红外LED 标靶图像,距离范围为1~7m,每增加1 m 获取一次图像,一共为7 张红外LED 图像,双目相机保持静止状态。记录7 张红外LED 图像的俯仰角、航向角、横滚角、深度数据,以及X 轴、Y 轴、Z 轴的误差值并形成图3 及图4 关系图。由图3、图4 可知,静态测量时,测量距离为1 m、2 m、3 m、4 m、5 m、6 m 及7 m 时,横滚角、航向角、俯仰角测量误差逐渐增加,横滚角的最小测量误差为0.236°,最大为2.105°;航向角的最小测量误差为0.204°,最大为1.745°;俯仰角的最小测量误差为0.051°,最大为1.029°。在X 轴、Y 轴、Z 轴方向上的测量误差逐渐增加,X 轴最小测量误差为1.665 mm,最高为73.231 mm;Y 轴最小测量误差为1.255 mm,最高为60.510 mm;Z 轴最小测量误差为0.150 mm,最高为15.370 mm。
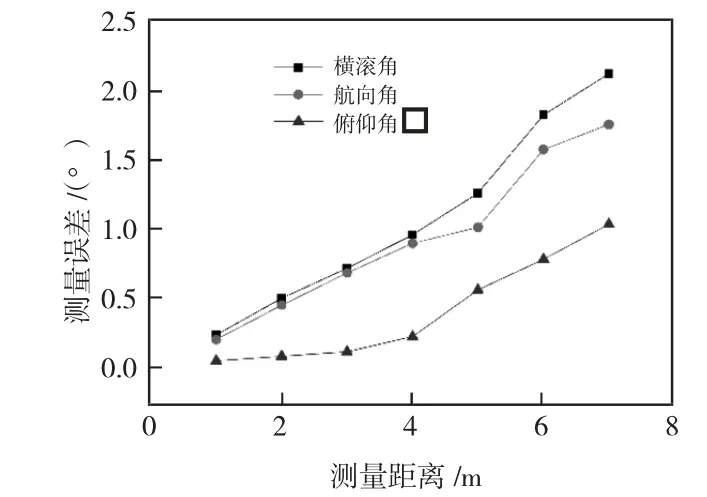
图3 姿态误差与测量距离关系
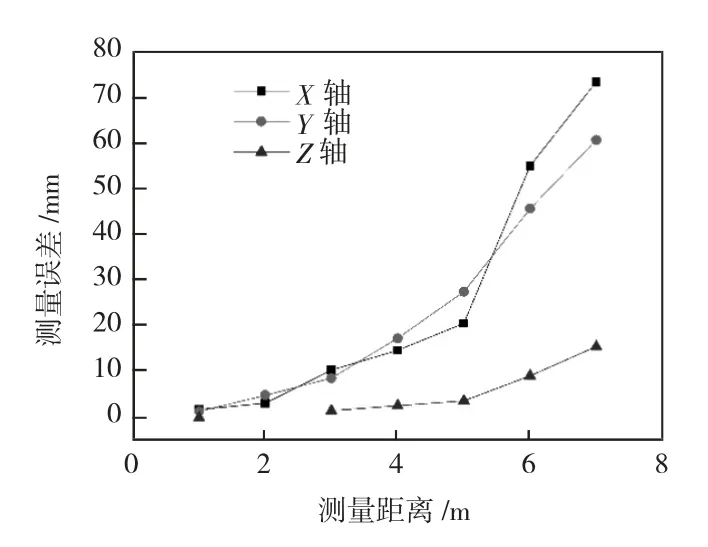
图4 位置误差与测量距离关系
3.1.2 动态试验
采用的双目相机为MYEYEN120 及配套软件,其他试验设备与静态试验相同。试验时,将双目相机固定于高精度的横向位移平台,红外LED 标靶固定于相机后方2 m 处。试验过程中,保持红外LED 标靶静止,双目相机等间隔50 mm 移动并获取图像信息。记录每一张图像的特征点数据并对掘进机俯仰角、航向角、横滚角,以及X 轴、Y 轴、Z 轴数据进行统计分析,发现上述各参数测量误差都优于静态试验数据结果,有效实现了对静态试验累积误差的抑制,满足掘进机实际工况使用要求。
3.2 导航试验
悬臂式掘进机导航试验方案如图5 所示,分为静态试验、动态试验两部分,分别完成试验平台的搭建、静置、导航数据采集、数据处理及试验结果分析。
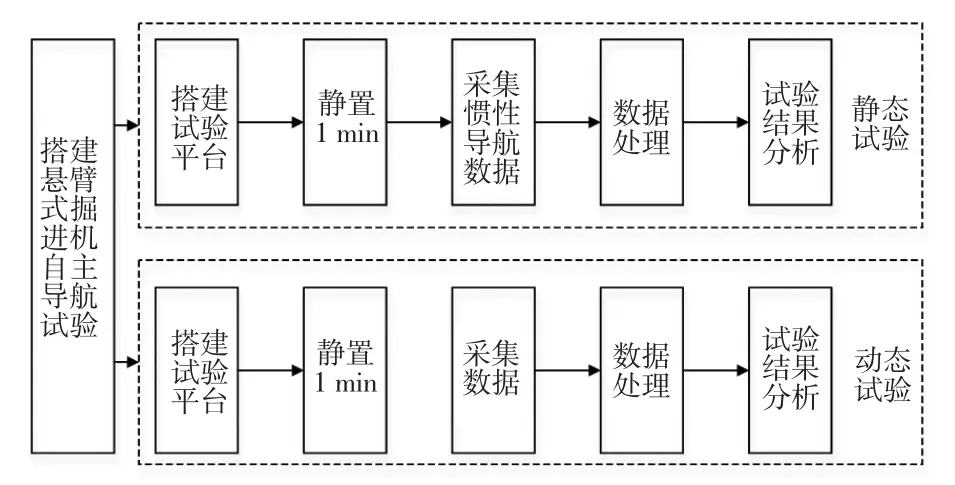
图5 悬臂式掘进机自主定位导航控制系统导航试验方案
3.2.1 静态试验
采用的捷联惯导型号为TransducerM9 及其配套数据采集软件,固定于水平载物台。
试验时,保持捷联惯导静止,采集时间T 内捷联惯导的输出数据并进行数据统计分析。发现:X 轴向位移漂移值为2 m、Y 轴向位移漂移值为2.5 m、Z 轴向位移漂移值为2.1 m。掘进机俯仰角误差在±0.06°以内,航向角误差在±0.05°以内,横滚角误差在±0.08°以内。
3.2.2 动态试验
将捷联惯导装置固定在高精度三轴转台上,通过控制转台的回转角实现对捷联惯导装置的动态控制并利用配套数据采集软件采集捷联惯导姿态输出数据。试验时,三轴转台回转角转动角度为2°,并保持30 s。试验发现:捷联惯导航向角解算结果与实际航向角线性跟随性较好,最大误差为0.3°。
3.3 融合定位试验
将双目相机位姿测量与捷联惯导位姿测量技术进行融合,验证该方案的稳定性和测量精度。试验时,将双目相机、捷联惯导系统固定于悬臂式掘进机机身的合适位置,按照设置双目相机/捷联惯导的数据采样频率、机身运动路径规划,按路径移动机身、同步采集图像和惯导数据、数据校准、数据处理、试验结果分析、误差分析的步骤进行试验。发现:该融合定位方案抑制了掘进机关键点上测量的稳定性,未发生漂移,抑制了累计误差,增强了对掘进机俯仰角、航向角、横滚角,以及X 轴、Y 轴、Z 轴测量数据的精确性和稳定性。
4 结论
1)由双目相机、捷联惯导技术融合方案实现的对悬臂式掘进机自主定位,能够有效抑制单一定位方案的累计误差,抑制在X、Y、Z 轴的位移偏移。
2)提高了悬臂式掘进机自主位姿测量精度,有效保障了悬臂式掘进机的自主行进、自动截割及智能化、无人化的发展。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
青年文学家(2022年10期)2022-04-25
江苏农业科学(2022年6期)2022-04-15
数字海洋与水下攻防(2020年5期)2021-01-04
电子制作(2019年20期)2019-12-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
现代计算机(2016年11期)2016-02-28
火控雷达技术(2016年1期)2016-02-06
