
机器视觉技术在架空乘人装置智能控制中的应用
2022-05-14 02:49赵乐
机械管理开发 2022年3期
赵 乐
(汾西矿业集团有限责任公司灵北煤矿,山西 灵石 031302)
引言
现阶段架空乘人装置运行采用手动控制,每班需安排专人操控架空乘人装置启停,但是由于无法实时掌握沿途乘坐人员数量,一般架空装置采用恒速运行方式[1-2]。虽然架空承人装置驱动系统安装有变频器,但仅起到软启动功能,未能充分发挥节能降耗效果[3]。为此,本文提出将机器视觉技术应用到架空乘人装置控制中,通过分析乘坐人数对架空乘人装置运行速度进行智能控制,不仅可实现无人值守,而且有助于降低能耗。
1 山西某矿架空乘人装置概况
山西某矿井下布置5 部架空乘人装置,通过搭接提高地面到工作点通行效率。架空乘人装置总的运输里程达到26.5 km。架空乘人装置结构主要包括防爆电机(永磁电机)、驱动轮、配重块、牵引钢丝绳、迂回轮架及组件等。架空乘人装置采用变频器控制运行,运行速度理论上可实现0~2.3 m/s,现场应用过程中架空乘人装置多保持0.8 m/s 速度运行,主要是由于架空乘人装置运行速度调节面临需安排专人值守、速度调节无依据等问题。
统计数据显示,矿井布置的架空乘人装置年费用高达35 万元,且架空乘人装置在交接班期间乘人较多,平时时间乘坐人员较少。因此依据架空乘人装置人员乘坐情况对其运行速度进行调整,可降低架空乘人装置能耗及损失量。
2 机器视觉技术在架空乘人装置控制中的应用
2.1 架空乘人装置原控制方式
以井下1 号副斜井架空乘人装置为例,对架空乘人装置原控制方式进行分析。该架空乘人装置运输距离共计3.6 km,运行速度为0.8 m/s,布置倾角22°,配套电动机功率为45 kW,采用机尾重锤张紧,具体架空乘人装置结构如图1 所示。架空乘人装置采用人工操作PLC 控制变频器、电动机、驱动轮、保护器等设备运行,当架空乘人装置停止运行后若井下人员需乘坐时,则需要通过井下IP 电话联系调度室,再由调度员指示架空乘人装置操作员启动;同时当无人乘坐时架空乘人装置仍保持原有状态运行,存在一定程度资源浪费、无法智能控制等问题。

图1 架空乘人装置结构
2.2 机器视觉技术现场应用
为提高架空乘人装置控制水平,提出将机器视觉技术运用在架空乘人装置中,通过机器视觉、红外传感器对人员乘坐情况进行判断,以便实现架空乘人装置智能化控制。具体机器视觉技术应用后,架空乘人装置控制系统结构如下页图2 所示。现场控制仍采用原有的就地控制器(FX-2N 系列PLC),通过增设信号转换器读取就地控制器运行参数,并通过新增PLC 远程控制架空乘人装置启、停及运行速度。信号转换器与新增PLC 间通过以太网接口连接,并经光电转换模块接入井下已有工业以太网环网。

图2 机器视觉技术应用后架空乘人装置控制系统结构
在1 号副斜井三水平、五水平及+750 m 水平上下乘车点均安装热红外传感器、智能识别摄像头,用以对架空乘人装置人员乘坐情况进行监测。当架空乘人装置有人乘坐时,热红外传感器会检测到红外信号并经BISS0001 集成处理模块处理后输出继电器常闭信号;当无人乘坐时则BISS0001 集成处理模块输出继电器常开信号。
1 号副斜井智能识别摄像头布置情况如下页图3所示,通过摄像头获取图像并结合计算机对图像进行分析,从而判定架空乘人装置是否有人员乘坐。现场架空乘人装置运行控制中以机器视觉判定为主、热红外传感器监测结果为辅。通过机器视觉技术应用,可实现架空乘人装置乘坐情况判定,并依据人员乘坐数量调节架空乘人装置运行速度、工作状态,以便实现架空乘人装置运行智能控制。
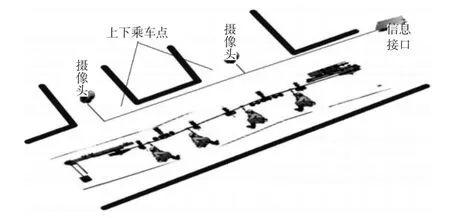
图3 智能识别摄像头布置位置示意图
2.3 架空乘人装置智能控制应用效果
2.3.1 技术优势
1)可优化架空乘人装置运行控制、实现智能化运行控制,降低设备能耗及磨损程度。
2)可实现架空乘人装置无人值守,从而将专职操作员从恶劣环境中解放出来,减少井下作业人员数量。
3)通过新增设PLC、信号转换器,可将架空乘人装置运行参数实时传输至地面监控中心,调度员可实时掌握架空乘人装置人员乘坐及运行情况。
2.3.2 现场应用效果
1)在1 号副斜井架空乘人装置应用机器视觉技术并辅助采用热红外传感器后,可实时监测架空乘人装置人员乘坐情况,现场应用过程中人员监测结果精准度高,系统运行可靠。
2)1 号副斜井架空乘人装置在原控制方式下每天运行时间为20 h(检修时间4 h)。采用机器视觉技术对架空乘人装置运行进行控制后,架空乘人装置在无人乘坐情况下即会停止运行,每天可减少空转时间约7.5 h、年节省空转时间达到2 700 h,预计每年可节省电能消耗约12.2 万kW·h,节约5.6 万元电费。
3)架空乘人装置累计运行超过3 000 h 润滑油需全部更换,单次更换成本约为2.7 万元,则年可节省润滑油费用约2.4 万元;同时在钢丝绳、脱绳轮等更换方面年可节省约3.7 万元。架空乘人装置实现智能化控制,调度中心可遥控架空乘人装置运行,无须值守人员,年可减少人力资源投入约18 万元。
4)将该技术应用推广到矿井其余的4 台架空乘人装置上后,预计年可节省矿井投入约160 万元。
3 结语
控制系统采用机器视觉技术、热红外传感器对架空乘人装置人员乘坐情况进行实时监测,PLC 依据人员乘坐情况调整架空乘人装置运行状态及运行速度;同时地面监控中心可通过PLC、光电转换器及工业以太网实时掌握架空乘人装置运行状态并遥控指挥。
现场应用后,架空乘人装置可实现无人值守智能化运行,矿井5 台架空乘人装置年可节省费用约160 万元,同时系统结构简单、应用成本低。
猜你喜欢
环球时报(2022-07-13)2022-07-13
小猕猴智力画刊(2022年4期)2022-05-25
环球时报(2022-03-14)2022-03-14
铁道建筑技术(2021年3期)2021-07-21
中学生百科·大语文(2021年4期)2021-05-12
电影(2018年8期)2018-09-21
山东工业技术(2016年15期)2016-12-01
发明与创新(2016年5期)2016-08-21
基层建设(2015年30期)2015-10-21
人间(2015年21期)2015-03-11
