随钻单极子声波测井模式优化及远探测∗
2022-05-16 05:55朱祖扬
应用声学 2022年2期
朱祖扬
(1 页岩油气富集机理与有效开发国家重点实验室 北京 102206)
(2 中国石化石油工程技术研究院 北京 102206)
0 引言
随钻声波测井通过测量地层的纵波速度和横波速度来对地层压力进行评价[1−3]。为了获得钻井过程中所钻地层的非均匀性特征和地层边界信息,随钻声波测井应具有方位特性和成像功能[4]。近年来,在随钻多极子声波测井技术取得成功应用的情况下[5−7],随钻声波测井技术的方位特性也成为了研究的热点,波速周向变化测量和远探测反射声波成像测井得到了发展。斯伦贝谢公司提出了一种偏心点声源测井工具,研究了声源对方位横波各向异性的敏感性,指出偏心点声源具有方位指向性[8]。哈里伯顿公司研制了XBAT 仪器,使用多极子声源发射和定向接收器接收,能够实现方位探测[9−10];威德福公司研制了CrossWave仪器[11],使用方位聚焦声源和定向聚焦接收器接收,在仪器旋转时能够对井周地层速度成像;中国科学院地质与地球物理研究所研制了外径171 mm(6.75 英寸)随钻方位声波成像测井仪,使用偏极子发射和定向接收器接收,能够对井周地层的纵波速度成像。陈俊圆等[12]、张正鹏等[13]提出了一种适用于随钻方位声波测井的瓦片状声波发射换能器,基于瓦片状声源测量地层的纵波慢度,识别井周地层方位速度信息。卫建清等[14]数值模拟慢速各向异性地层中随钻偏心点声源激发的声场,研究其在井孔中接收的响应特征,探讨了测量地层各向异性的方法。陈雪莲等[15]从随钻地质导向的实际需求出发,利用有限差分法研究了随钻条件下的单极子声源在井孔内外的传播特征,给出了应用反射纵波识别井外地层界面的实施方案。
目前多极子声源和偏心点声源会被首先使用在随钻方位声波测井中,而单极子声源由于被认为没有方向性则不予使用,未能挖掘随钻单极子声波测井数据所包含的方位信息。本文对随钻单极子声波测井模式进行了优化,使用单极子声源发射声波和偏极子接收器接收声波的测量模式,利用数值模拟方法研究了随钻单极子声源的方位特性和反射声场,并开展了随钻单极子声波远探测实验。这项工作将有助于随钻单极子声波测井理论的完善,为其在非均匀性地层评价和地质导向钻井等方面的使用提供理论依据。
1 随钻单极子声源方位特性研究
1.1 不同方向速度模型井
模型井从井内到井外依次为流体、钻铤、流体、地层[16],井孔半径为0.108 m,井外地层为无穷大且分为A、B、C 和D 4 个扇区,A 扇区方位角为315◦~45◦,B 扇区方位角为45◦~135◦,C 扇区方位角为135◦~225◦,D 扇区方位角为225◦~315◦,其中A、B、C 扇区为不同地层,地层的纵波速度和横波速度均依次增大,B 和D 扇区为相同地层,模型井的声学参数见表1。随钻声波测井仪位于井孔内且居中,使用了1 个单极子声源发射声波,8 个方向接收器阵列接收声波,接收源距为2.00 m。单极子声源安装在钻铤的外壁上,接收器阵列周向等夹角45◦分布在钻铤的外壁上,每个接收器阵列又包含了8个接收单元,接收单元间距为0.20 m。图1给出了模型井测井示意图,其中T 为单极子声源,R1、R2、···、R8为每个接收器阵列上的接收单元。

图1 不同方向速度模型井Fig.1 Borehole model with different velocity at direction

表1 模型井声学参数Table 1 Paramters of the model
1.2 波速周向变化测量
使用有限差分法数值模拟了不同方向速度模型井的声场传播[17−18],单极子声源的主频为10.00 kHz,8 个方向的接收器阵列独立接收声波,即采用单极子声源发射和偏极子接收器接收的测量模式,得到了8 个方向上的接收波形。图2 给出了方位角0◦和180◦接收到的波形,所对应的地层分别是A 和C 扇区地层,由于这两个扇区的地层纵波速度和横波速度不同,导致了接收到的波形形状不同。图3 给出了这两个方位角的接收波形的时间慢度相关(Slowness time coherence, STC)图[19],其中方位角0◦所对应地层的纵波慢度和横波慢度分别为240.00 µs/m 和430.00 µs/s,方位角180◦所对应地层的纵波慢度和横波慢度分别为210.00 µs/m 和400.00 µs/s,说明这两个方位角所对应地层的纵波速度和横波速度不同。图4 给出了方位角0◦、45◦、90◦、135◦、180◦、225◦、270◦、315◦的接收波形的时间慢度相关图,从而得到了波速周向变化图。计算得到方位角0◦、90◦、180◦、270◦所对应地层的纵波速度分别为4166.67 m/s、4347.00 m/s、4761.90 m/s 和4347.00 m/s,横波速度分别为2325.58 m/s、2500.00 m/s、2500.00 m/s和2500.00 m/s。计算结果表明,地层纵波速度计算值偏差为4.17%、3.40%、4.76%和3.40%,地层横波速度计算值偏差为1.12%、0%、7.40%和0%,因此通过这种测量模式,能够较好地识别井周地层不同方向的纵波速度和横波速度,由于纵波是首波,对地层方位特性更容易提取和观测。
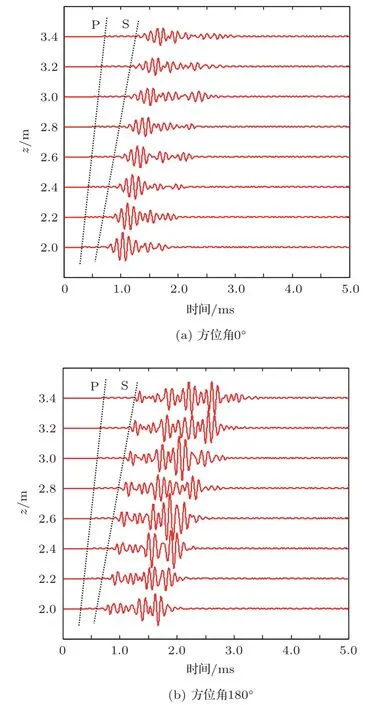
图2 不同方向的阵列接收波形Fig.2 The waveform received with array receivers at different direction
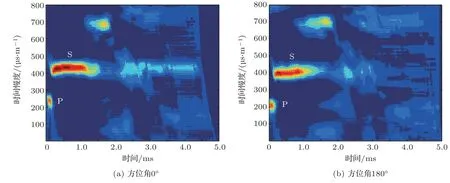
图3 不同方向接收波形的时间慢度相关图Fig.3 The STC chart of received waveform at different direction
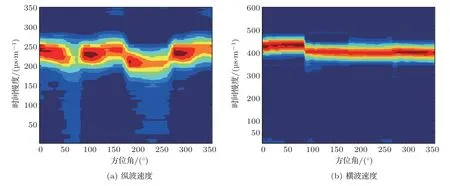
图4 波速周向变化图Fig.4 Acoustic velocity variation around borehole
2 随钻单极子声源反射声场研究
2.1 反射声场模型
反射声场模型为一无限大均匀介质区域,介质为水,在该区域内放置有随钻声波测井仪和一块铝质挡板,随钻声波测井仪的轴向和铝质挡板的反射面平行,如图5所示。

图5 反射声波探测模型Fig.5 Reflection wave detection model
随钻声波测井仪的结构和图1 的一致,唯一不同之处是,这里的接收源距为1.00 m,铝质挡板与单极子声源T 的距离为3.00 m,所在方向为方位角0◦。铝质挡板的尺寸为高度1.50 m、宽度0.50 m 和厚度6.00 mm,密度为2700 kg/m3,纵波速度为6300 m/s,横波速度为3100 m/s,声阻抗为17.01 MPa·s/m3,远大于水的声阻抗1.5 MPa·s/m3。反射面声阻抗差异很大有利于反射波的提取,模型的声学参数如表2所示。

表2 反射波探测模型声学参数Table 2 Paramters of the model
2.2 反射声波探测
使用有限差分法数值模拟了铝质挡板的反射声场传播,单极子声源的主频为10.00 kHz,8 个方向的接收器阵列独立接收声波,即采用单极子声源发射和偏极子接收器接收的测量模式,得到了8个方向上的接收波形。图6给出了方位角0◦和180◦接收到的波形,从图6 中可以看出,接收波形包含了两种波形,即直达波和反射波。方位角0◦直达波到时为0.75 ms,直达波幅度为1000,而反射波到时为4.08 ms,反射波幅度为30.08;方位角180◦直达波到时和直达波幅度与方位角0◦的情况一致,而反射波到时为4.16 ms,反射波幅度为12.30。因此方位角0◦的反射波到时要小于方位角180◦的反射波到时,而方位角0◦的反射波幅度要大于方位角180◦的反射波幅度。图7 给出了不同接收单元(R1和R8)周向的接收波形,从接收单元R1 的接收波形可以看出,随着方位角由0◦增加到180◦,反射波到时由小变大,反射波幅度则由大变小;随着方位角由180◦增加到360◦,反射波到时由大变小,反射波幅度则由小变大。这是因为铝质挡板所处的方向是方位角0◦,离方位角0◦的接收器阵列较近,而离方位角180◦的接收器阵列较远,距离近反射波到时小和幅度衰减小,距离远反射波到时大和幅度衰减大。从接收单元R8 的接收波形可以看出,反射波的传播规律和接收单元R1 接收到的反射波传播规律基本一致,但是比接收单元R1 接收波形多了一个二次反射波,这是因为接收单元R8 比接收单元R1 离声源的距离更远。图8 给出了不同接收单元(R1 和R8)的反射波方位特性,即反射波到时和反射波幅度对方位的敏感性,进一步说明,随着方位角由0◦增加到180◦,反射波到时由小变大,反射波幅度则由大变小;随着方位角由180◦增加到360◦,反射波到时由大变小,反射波幅度则由小变大。从接收单元R8 的反射波到时和反射波幅度可以看出,方位角0◦的反射波到时为4.32 ms,反射波幅度为21.92,方位角180◦的反射波到时为4.41 ms,反射波幅度为7.82。在同一方位角,接收单元R8 接收到的反射波到时要大于接收单元R1 接收到的反射波到时,同时接收单元R8 接收到的反射波幅度要小于接收单元R1 接收到的反射波幅度,这是因为接收单元R8 比接收单元R1 离声源的距离更远。因此通过这种测量模式,能够接收到铝质挡板的反射波和提取出反射波的方位信息,进而可以获取铝质挡板的距离和方位信息。

图6 不同方向的阵列接收波形Fig.6 The waveform received with array receivers at different direction

图7 不同接收单元的周向接收波形Fig.7 The waveform received by different receive cells from azimuth 0◦to 360◦

图8 反射波方位特性Fig.8 Azimuthal characteristic of reflection wave
3 随钻单极子声波远探测实验
设计了一套随钻声波测量装置用于声波远探测实验,该装置包括一个发射短节和一个接收短节,均由铝质材料加工而成,外径均为171.00 mm,内径均为57.20 mm,长度分别为417.00 mm 和543.00 mm。随钻声波测量采用“一发两收”的工作模式;在发射短节上安装了一个单极子声波发射换能器(标识符T),发射换能器的发射频率为13.80 kHz;在接收短节上安装了4 组接收器阵列,接收器阵列等夹角90◦周向分布在接收短节的外侧壁上,每组接收器阵列由2 个宽频接收换能器(标识符R1 和R2)组成,接收换能器的接收带宽为0~32.20 kHz,间距为200.00 mm。
在水池里放入随钻声波测量装置,并用水池壁作为反射界面,开展随钻单极子声波远探测实验,如图9 所示。水池的尺寸为长7.30 m、宽6.30 m 和深5.00 m,水池的上面有航吊和行车,可以挂载和移动随钻声波测量装置。发射短节在下,接收短节在上,并且两个短节在一个垂线上,发射换能器与最近的接收换能器的距离为0.88 m(T到R1的距离)。以水池壁作为反射界面,随钻声波测量装置一侧的2 个宽频接收换能器正对着水池壁并接收来自水池壁的反射波,调整随钻声波测量装置与水池壁之间的距离,设置了1.00 m、3.00 m、5.00 m 和7.00 m 等4个反射界面距离。

图9 声波远探测水池实验Fig.9 Water tank experiment of acoustic remote detection
开展了4 次实验,接收换能器R1 和R2 记录到了反射界面距离为1.00 m、3.00 m、5.00 m和7.00 m的完整波形,每一道波形记录时长为20.00 ms,实际波形有效时长为12.00 ms,记录的波形包含了直达波和反射波,如图10所示。从图10可以看出,直达波在前,反射波在后,直达波幅度大,反射波幅度小,这是因为直达波为声波从发射短节经过水介质直接传播到接收短节的波形,反射波为声波从发射短节经过水池壁反射回接收短节的波形,两种波传播的距离不一样导致了声波到时和声波幅度也不一样。随着反射界面距离由小变大,反射波到时逐渐变大,反射波幅度逐渐变小。对R1 和R2 记录的波形进行了处理,反射界面距离1.00 m、3.00 m、5.00 m和7.00 m 的反射波到时分别为1.50 ms、4.30 ms、6.90 ms、9.50 ms(9.60 ms),根据声波测距原理,取水的声速1500 m/s,计算得到反射界面测量距离分别为1.16 m、3.23 m、5.18 m、7.16 m,测量误差分别为16.00%、7.67%、3.60%和2.28%,如表3 所示。说明反射界面距离越大,测量结果越可靠,这是因为反射界面距离越大,反射波到时提取误差和传播介质的声速误差影响越小,但是反射界面距离越大,反射波信号越小,又会产生新的测量误差。实验证明,随钻单极子声源可以准确测量到反射界面距离,在合适尺度范围内进行声波远探测是可行的。

图10 两个接收器接收波形Fig.10 The waveforms received by two receivers

表3 声波远探测实验数据Table 3 Experimental data of acoustic remote detection
4 结论
(1)基于不同方向速度模型井数值模拟了随钻单极子声波传播特征,使用单极子声源发射和偏极子接收器接收的测量模式,获得了波速周向变化图,能够较好地识别井周地层不同方向的纵波速度和横波速度。
(2)建立了一个含反射界面、无限大均匀介质的反射声场模型,数值模拟了随钻单极子反射波的传播特征,使用单极子声源发射和偏极子接收器接收的测量模式,获得了反射波到时和反射波幅度的变化规律,反射波具有方位性;研制了随钻声波测量装置,在水池里开展了随钻单极子声波远探测实验,测量到了1.00 m、3.00 m、5.00 m 和7.00 m 的反射界面距离,测量结果可靠。
(3)虽然随钻单极子声源是全向发射和声源没有方向性,但是使用单极子声源发射和偏极子接收器接收的测量模式,则从随钻单极子声波测井数据里仍然可以提取到地层速度的方位信息,在合适尺度范围内使用随钻单极子声源进行声波远探测是可行的。因此随钻单极子声波测井技术在非均匀性地层评价和地质导向钻井等方面具有广阔的应用前景。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
结构工程师(2022年2期)2022-07-15
空间科学学报(2020年4期)2020-04-22
电子制作(2019年23期)2019-02-23
铁道通信信号(2018年8期)2018-11-10
现代计算机(2018年19期)2018-08-01
红蜻蜓·低年级(2017年6期)2017-10-30
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
支点(2016年11期)2016-12-22
电子制作(2016年19期)2016-08-24