针对高阶Sigma-Delta 调制器稳定性提升的相位补偿器设计
2022-05-17 00:41王欣欣
信息记录材料 2022年3期
王欣欣,周 彪
(江南大学 江苏 无锡 214122)
0 引言
高阶Sigma-Delta 调制器是在具有低通滤波特性的二阶传感结构后级联电学积分器,积分器的个数越多,噪声整形能力越强,但高阶Sigma-Delta 调制器面临着稳定性差的问题,噪声传递函数的增益(1-z-1)L在高频处会迅速增大。
解决调制器不稳定问题的方法主要有:(1)采用MASH 结构[1-2],但电路设计复杂;(2)采用相位超前补偿器(主要方法)。
本文所采用的分数阶相位补偿器PDu,引入微分参与控制,可以使系统的稳定性增加,通过观测系统的稳定性提高来证明。传递函数形如:H(s)=kp+kd*su,其中:kp为比例系数、kd为微分系数、su为分数阶微分算子。su具有积分效果,可以对系统起到噪声整形的作用。u是微分阶次,阶次为1 时,PDu即整数阶PD相位补偿器。
使用MATLAB 编程,采用粒子群优化算法对kp、kd和α3 个参数进行优化,通过寻求最优解带入SIMULINK 仿真系统,分别在分数阶和整数阶情况下求取系统最高信噪比。
当前使用分数阶相位补偿器提升高阶Sigma-Delta 调制器系统稳定性的研究非常有限。文献[3]中只分析了对比整数阶相位补偿器,分数阶相位补偿器有着更好的噪声整形效果,并没有对比没有加相位补偿器时系统的信噪比变化。本文在现有的研究基础上,对此进行完善,同时使用Lee 判据[4-6]加以辅助,其具体表述如下:一个1-bit 量化器Sigma-Delta 调制系统,噪声传递函数NTF=H(z)在满足如下条件时可以是稳定的,即max|NTF(ejw)|≤1.5,0 ≤w≤π。
1 高阶Sigma-Delta调制器系统建模
四阶CIFF 结构Sigma-Delta 调制器的系统框图见图1。
根据图中所示的Sigma-Delta 调制器的系统框图的输入输出关系,可以列出下列方程组:
为了减少谐波干扰,将信号通路到第二、三、四级积分器去除,即令b2=b3=b4=0。其中T是采样周期,每一级积分器的传递函数H为1/(z-1),量化器等效为带有随机加性白噪声的加法器[7],H(z)是本文所采用的分数阶相位补偿器PDu的传递函数。联立上式可推得噪声传递函数NTF 结果如下式所示:
在Simulink 搭建的Sigma-Delta 调制器模型中所示参数是未知的,需要通过Matlab 中的SDToolbox 工具箱得到。使用SDToolbox 中synthesizeNTF 函数合成调制器的噪声传递函数,realizeNTF 函数把噪声传递函数映射到积分器的反馈系数[a,g,b,c]中,mapABCD 函数计算得到的优化后的结构参数[8]。通过对系统模型的仿真得到最优的信噪比,最终确定的系数见表1。
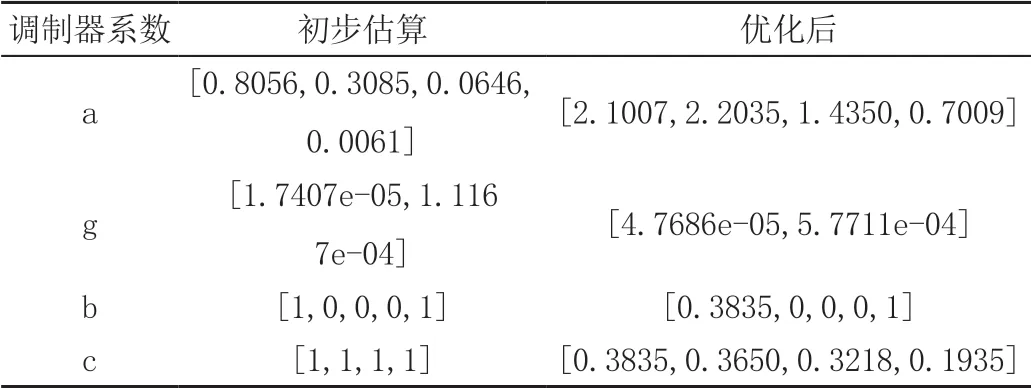
表1 调制器系数
2 粒子群算法优化相位补偿器参数
分数阶PD控制器的传递函数H(s)=kp+kd×su,本文采用的分数阶微分形式为s{mu},其中mu是s运算符的阶数。mu=1 时,即整数阶微分形式;mu介于0 到1 之间时,即分数阶微分形式。在SIMULINK 系统中所加的相位补偿器的内部结构图见图2。
通过粒子群优化(Particle swarm optimization,PSO)算法[9-10]对参数kp、kd和mu进行优化,在算法中,需要在三维空间内搜索,寻找目标函数的最优点。粒子的当前位置通过其速度和位置更新为最近发现的自身和全局最佳位置。
2.1 初始化相关参数
首先,综合系统的优化性能和算法的计算时长,设置种群规模是50,迭代次数也取50,学习因子c1=c2=2。3 个参数的粒子位置矢量定义xi=(kp,kd,mu),其中i代表空间维度,需要设置粒子的速度和位置区间,以防止超出最大的区间范围,为每个待优化参数设定不同的粒子移动范围。代入数值检测后可以获得kp、kd和mu的大致范围,从而确定3 个粒子的最大位置区间分别为[popmin1:popmax1;popmin2:popmax2;popmin3:popmax3]=[-3:3; -3:3; 0:1]。
2.2 性能评价指标
选取信噪比(Signal-to-noise ratio,SNR)作为粒子群优化算法的适应度函数。在粒子的每一次迭代寻优过程中,当粒子的移动速度和位置超出边界值,令其等于边界值。将更新后的粒子的位置对应的参数设置Sigma-Delta 调制器的PDu控制器的相应参数,然后运行系统计算相应的适应度函数。每次更新kp、kd和mu的数值都需要遍历整个系统,调用添加的calcSNR 函数计算信噪比,具体实现步骤如下:对提取到的正弦信号和噪音成分使用窗函数截取之后进行快速傅里叶变换,求得的信号幅度值平方求和结果得到信号能量和噪音能量,二者的比值即待求的信噪比。
其中,Es为信号能量,En为噪声能量。As为信号振幅,An为噪声振幅。每次更新粒子代入系统求得的信噪比作为适应度函数,通过最大化适应度函数使系统达到稳定。第j个粒子的适应度函数为:
fitness(j)=SNR
系统迭代50 次以后,系统自动完成优化。优化完成后,在MATLAB 命令行窗口自动输出3 个参数的数值以及最优适应度即最优SNR 的数值,若SNR 相较于之前有所提高,由此实现了PDu控制器的参数自整定。
3 仿真结果及性能分析
使用多个调制器稳定性衡量标准综合考量:首先检查每级积分器的输出电压是否符合实际情况。使用粒子群算法对比例微分参数优化完成后,系统SNR 取最大值时,则认为调制器处于最稳定状态。再使用Lee 判据加以辅助,判定噪声传递函数NTF 的峰值幅频值是否小于1.5。
当mu=1 时,即整数阶相位补偿器。系统经过50 次迭代优化,最高信噪比为152.569 8 dB,对应的优化参数为:-1.606 3、0.048 0。粒子的移动范围是逐渐收敛的,对比原始Sigma-Delta 调制器系统信噪比有所提升,信噪比提升了大约5.0 dB。图3 为整数阶控制器粒子在迭代过程的收敛趋势。
增设分数阶相位补偿器情况下,通过50 次迭代优化,可得到的最高信噪比为SNR=155.938 4 dB,对应的优化参数为:2.116 7、0.662 2、0.602 8,对比原始Sigma-Delta调制器系统信噪比提升了大约8.4dB。同时可以看出,分数阶相位补偿器的噪声整形效果优于整数阶。图4 为分数阶控制器粒子在迭代过程的收敛趋势。两种情况下,粒子的移动范围都是逐渐收敛的。
使用Lee 判据判定系统的稳定性,对于没有添加相位补偿器的原始四阶CIFF 结构Sigma-Delta 调制器的系统,令z=ejw,求解噪声传递函数NTF(z)的幅频响应,在[0,2π]范围内的幅频曲线图见图5,幅值最高可达1.500 14。
增设相位补偿器的四阶CIFF 结构Sigma-Delta 调制器的系统,令z=ejw,将优化后的调制器系数以及相位补偿器的参数带入噪声传递函数NTF,分别求解增设整数阶相位补偿器和分数阶相位补偿器后整个系统的噪声传递函数NTF(z)的幅频响应,整数阶相位补偿后和分数阶相位补偿后在[0,2π]范围内的幅频曲线图。可以看出加了相位补偿模块之后,噪声传递函数的幅频值远小于1.5,系统稳定。
4 结论
本文的主要目的是为了寻找最优的PDu参数kp、kd和mu,从而提高高阶Sigma-Delta 调制器的稳定性。综合多项实验结果表明,使用粒子群优化可以实现比例微分控制器参数的自整定,同时在一定程度提高了Sigma-Delta 调制器系统的稳定性,提高了系统的噪声整形能力。通过增设相位补偿器与原始四阶CIFF 结构Sigma-Delta调制器的系统比较,增设相位补偿器的系统的信噪比的值有所提升;同时通过对比分数阶和整数阶相位补偿器,可以看出分数阶相位补偿器有更好的噪声整形效果。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
导弹与航天运载技术(2022年2期)2022-05-09
湖南大学学报(自然科学版)(2021年8期)2021-09-27
导航定位学报(2021年3期)2021-06-19
装备环境工程(2020年3期)2020-04-03
电子制作(2019年15期)2019-08-27
玻璃(2019年3期)2019-04-01
演艺科技(2017年1期)2017-03-09
飞碟探索(2016年11期)2016-11-14