
基于Abaqus的新型铁路信号继电器设计
2022-05-18 08:17郜新军禹志阳
中国铁路 2022年2期
郜新军, 禹志阳
(中国铁道科学研究院集团有限公司 通信信号研究所,北京 100081)
0 引言
20 世纪60 年代,我国自主研制成功AX 系列信号继电器,作为信号设备中用量最大的基础安全元件,在我国轨道交通自动控制系统中发挥了巨大作用。但随着科学技术的进步,信号系统功能不断升级[1],AX系列继电器在设计、工艺、材料等方面逐渐暴露出不足与缺陷,为适应我国轨道交通事业的迅猛发展,迫切需要研制新型铁路信号继电器。
传统铁路信号继电器的设计方法是依据机械手册进行理论计算,再通过样机测试验证设计合理性,研发周期长且成本高。Abaqus 作为一款通用的有限元仿真分析软件,不仅适用于单个零部件,而且可进行系统级仿真。与传统研发方式相比,Abaqus 的建模功能强大,在校核设计方案、保证产品质量、改进产品设计、降低产品成本、加快研发进度、提高产品强度和寿命等方面优势显著[2]。
随着有限元分析技术的发展,国内外诸多学者已开展基于有限元分析软件的继电器产品设计研究。苏秀苹等[3]运用Abaqus对磁保持继电器中柔体部件弹片进行建模,并对弹片的反力特性进行有限元分析;王其亚等[4]采用虚拟样机软件Adams 建立簧片衔铁铆接式继电器模型,仿真计算簧片在不同折弯角度下反力特性;蓝承燕等[5]借助Adams 对虚拟机械系统进行运动学和动力学分析,通过交互式图形环境及零件、约束、载荷等建立三维参数化模型,自动输出位移、速度、加速度和反作用力等,以动画和曲线图的形式显示仿真结果。乔延华等[6]通过Adams 对磁保持继电器进行动态仿真,研究触头断开、闭合过程的电流变化曲线。董家盈[7]对继电器触头系统中弹片与簧片进行仿真,研究其真实的受力变形及应变能力,并与试验数据进行对比分析。
文献调研结果表明,国内外在基于Abaqus 的继电器研发领域有一些成果,但仍缺乏基于Abaqus 的铁路信号继电器相关研究。因此,尽快开展基于有限元软件的新型信号继电器整机建模方法研究,分析信号继电器真实工况下的机械特性,对新型铁路信号继电器的研制具有重要意义。
在此,结合新型信号继电器的结构特点、工作原理及计算理论,利用Abaqus 建立刚柔结合的继电器整机模型,对正常工况下机械性能指标仿真。通过将有限元仿真结果与力学理论计算及样机测量值对比,证明该研究建模方法的准确性,能够适用高性能新型信号继电器的研发。
1 新型AX型信号继电器基本原理
1.1 工作原理及特点
信号继电器工作原理为:当线圈接通直流电源后,线圈中的电流使铁芯磁化,在铁芯内产生工作磁通,在继电器内部形成闭合回路。当铁芯与衔铁间(工作气隙处)产生的电磁吸力大到足以克服机械反力时,衔铁将与铁芯吸合,衔铁的运动通过拉杆带动动接点向上运动,使后接点断开,前接点闭合;当线圈断开直流电源后,线圈中的电流逐渐下降,在铁芯内产生的工作磁通减小。当铁芯与衔铁间(工作气隙处)产生的电磁吸力不足以克服机械反力时,衔铁将与铁芯断开,衔铁的运动通过拉杆带动动接点向下运动,使前接点断开,后接点闭合[8]。
接点系统是继电器的执行机构,新型信号继电器采用双拉杆传动形式,将托片改为限位架设计,为提高抗振性能对弹片尺寸参数重新设计。原AX 型继电器采用金属托片对静接点片限位,故障时结构上不能防止动合接点闭合;新型信号继电器采用限位架对静接点片强制卡位,当有1组动断接点错误地在释放位置保持闭合状态时,结构上应能防止动合接点闭合,满足故障-安全要求[9]。新型信号继电器结构示意见图1。
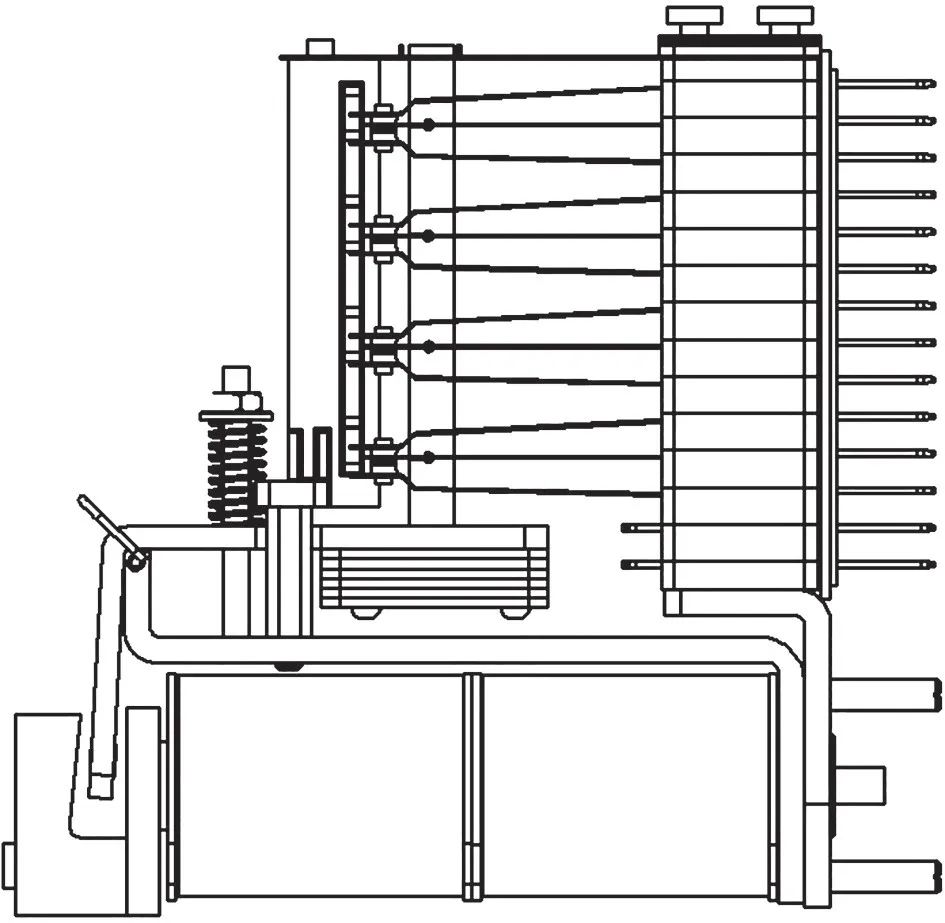
图1 新型信号继电器结构示意图
1.2 力学模型
机械反力是继电器正常动作的关键指标。在接点压力、接点间隙等参数指标满足标准要求的前提下,进行信号继电器机械反力的计算。首先,分析继电器机械特性,并研究继电器运动过程中力矩平衡理论;然后论述弹片悬臂梁弯曲理论;最后基于悬臂梁以及力矩平衡理论建立继电器机械反力计算模型。
1.2.1 机械特性
继电器励磁后,电磁力需要克服机械反力,机械反力由衔铁、拉杆及配重片重力,压簧弹力和拉杆推力3 个部分组成。继电器运动时所受机械反力是变化的,衔铁与铁芯间工作气隙和机械反力的关系曲线称作继电器的机械特性曲线。随着工作气隙变小,机械反力不断上升。在衔铁转动过程中,电磁吸力力矩需大于机械反力力矩。

式中:F为电磁吸力;L为铁芯中心至轭铁刀刃处距离;W为衔铁组件总重力;Lw为衔铁组件中心至轭铁刀刃处距离;Flg为拉杆推力;Lxt为拉杆中心至轭铁刀刃处距离;Fth为复位弹簧弹力;Lth为复位弹簧至轭铁刀刃处距离。
继电器运动期间,重力保持不变,压簧弹力根据其变形量直接计算。而拉杆推力大小与方向是变化的,拉杆推力模型通过弹片悬臂梁弯曲理论建立,是继电器机械反力计算的关键。
1.2.2 弹片悬臂梁弯曲理论
在材料力学中,应用悬臂梁弯曲理论解决弹片受压的挠曲问题。负载作用在弹片的首端示意见图2。在作用力F的作用点B和固定点O间任意截面m上,弹片的扰度y为:
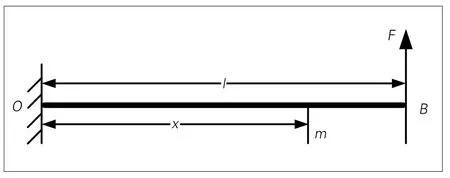
图2 负载作用在弹片的首端示意图
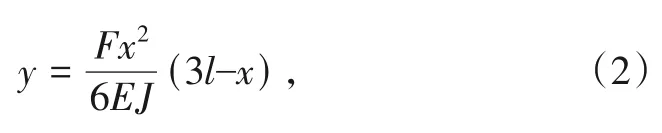
式中:l为弹片的长度;x为截面到固定点的距离;E为弹片的弹性系数;J为弹片的惯性力矩。
负载作用在距弹片固定点O为lk处示意见图3。若弹片的负载作用在距固定点O为lk的K点,则位于K点右边的弹片KB 将不承受任何负载。在作用力F的作用点K右边任意截面m上,弹片扰度y为:
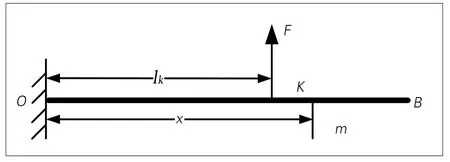
图3 负载作用在距弹片固定点O为lk处示意图

式中:lk为负载作用点至固定点的距离。
1.2.3 机械特性计算模型
根据新型信号继电器接点系统的结构特点,以继电器吸合为例,运行中接点系统(见图4)工作状态见表1。
图4 接点系统图例

表1 继电器运行中接点系统工作状态
不同扰度下静接点片压力Fj可根据悬臂梁理论计算。如图2—图4,中间接点弹片受到拉杆推力Ft和静弹片接点压力Fj两个力的作用,通过作用力互不相关的叠加原理分别计算弹片某点在单个作用力下的位移,然后将各位移相加便是弹片的总扰度。继电器运动中各工作过程计算模型见表2。
表2 继电器各工作过程力学计算
2 基于Abaqus的继电器力学仿真
Abaqus 是国际先进的通用有限元分析软件,在求解接触、大变形、非线性复杂问题方面具有明显优势。在此,采用Abaqus/Standard 求解器进行计算,将计算过程分为若干分析步,通过多次迭代算法分析继电器非线性运动问题,有限元仿真分析流程见图5。
图5 有限元仿真分析流程
2.1 导入零部件
首先,为保证仿真结果的准确性,通过专用检测设备对信号继电器零部件尺寸参数进行测量;然后,通过SolidWorks 绘制各零部件的三维模型。由于倒角、圆角、螺纹孔、装饰面等特征增大网格划分以及收敛难度,且对继电器结构整体强度无影响,因此对其进行必要的简化。最后,将各零部件三维模型以*.x_t格式导入Abaqus软件。
2.2 材料属性定义与装配
方案定义弹片为柔体部件(Deformable Part),衔铁、配重片、接点、拉杆等在模型中起连接固定作用,可忽略其结构柔度对系统的影响,因此将其定义为离散刚体部件(Discrete Rigid Part)。最后,组装模块(Assembly)中对各实体模型进行装配,构成一个完整的装配体(见图6)。零部件材料参数见表3。

表3 零部件材料参数
图6 信号继电器装配体
2.3 分析步定义
根据铁路信号继电器实际工作过程,依次设置定义分析步骤,对场变量输出结果、历史变量输出结果进行定义,并确定相应的分析类型。在此,定义4个分析步:
Step-1:拉开静接点弹片使其向两边偏移,确保弹片不再与限位架干涉。
Step-2:释放弹片,弹片恢复直至与限位架接触。
Step-3:通过配置压簧的刚度系数及预载荷进行压簧定义,无需将其实体化。经实测压簧长度为18.2 mm,刚度为0.115 N/mm,此分析步中将压簧的参考点RP-1向下位移5.2 mm;通过重力加速度及密度定义,对衔铁、配重片及拉杆组件的重力进行设置。
Step-4:对衔铁参考点设置位移载荷为x的负方向2.1 mm(继电器吸合过程的实际位移)。
2.4 边界条件定义
边界条件应根据继电器实际运动情况进行定义,包括添加约束条件、设置载荷、添加边界条件。
(1)添加约束条件:
①接触设置:铁芯和轭铁、铁芯和线圈、弹片根部与底座等的约束均为固定副,其相互约束均为一个整体;静接点弹片与限位架、拉杆与中间接点弹片等的约束均为移动副,其部件间可发生相对滑动;衔铁与铁芯、静接点与动接点之间的碰撞约束为接触副。
②运动耦合约束:表示定义的参考点与此区域的各节点之间建立一种运动上的约束关系。以弹片为例,设置弹片圆孔中心为参考点,受约束区域为圆孔内壁1 周,使弹片与参考点运动方式一致。
③连接属性设置:采用组合连接属性定义接点截面中点和弹片圆孔中心,使动触点与弹片粘结,2参考点之间不允许发生相对平移与旋转。
(2)设置载荷。通过重力加速度及密度定义,对衔铁、配重片及拉杆组件的重力进行设置。
(3)添加边界条件。首先将弹片根部固定以模拟其装配到固定块时的状态;其次,根据实际工况将轭铁、限位架固定螺杆位置固定。
2.5 网格划分
网格划分质量直接影响仿真分析的失效及精度,应重点针对柔体及含有接触属性的部件进行研究。所选的离散刚体部件三维实体单元为4节点三维线性刚体单元(R3D4);弹片采用扫掠网格的网格划分技术,由于弹片在受力过程中弯曲形变较大,对弹片部件进行较密的网格划分,有利于提高仿真精度并解决收敛问题。选用缩减单元模拟柔体部件,所选的三维实体单元均为8 节点六面体线性非协调模型单元(C3D8),克服了沙漏问题,降低了计算成本且位移结果精确。考虑到触点形状不规则,采用自由网格灵活的网格划分技术,缩短软件仿真计算时间。信号继电器网格剖分图见图7。
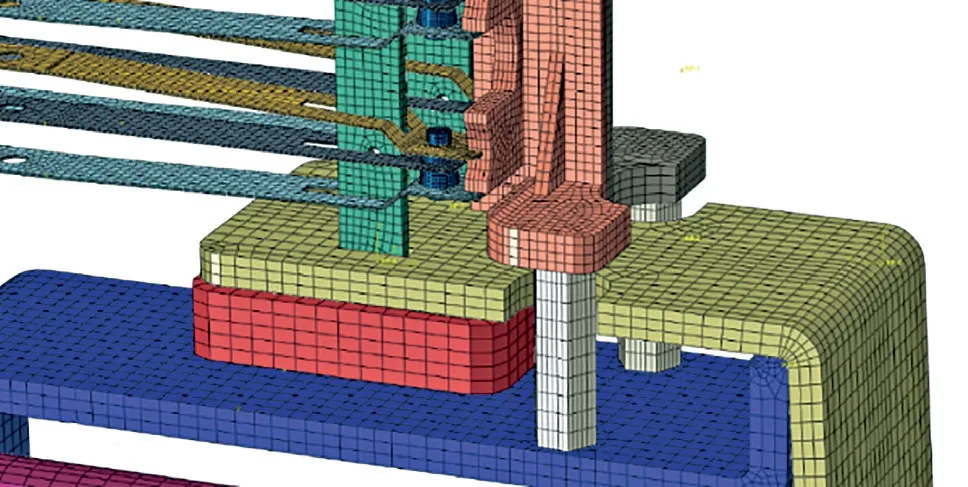
图7 信号继电器网格剖分图
2.6 分析结果
完成上述定义后提交分析作业至Job功能模块进行仿真,并在Visualization 模块中观察并分析仿真结果。经过仿真可见铁路信号继电器整个运动过程的状态,重点分析几项关键性能指标。
(1)接点压力。继电器释放状态下,动断接点的接点压力约为0.17 N;继电器吸合状态下,动合接点压力约为0.32 N(见图8)。
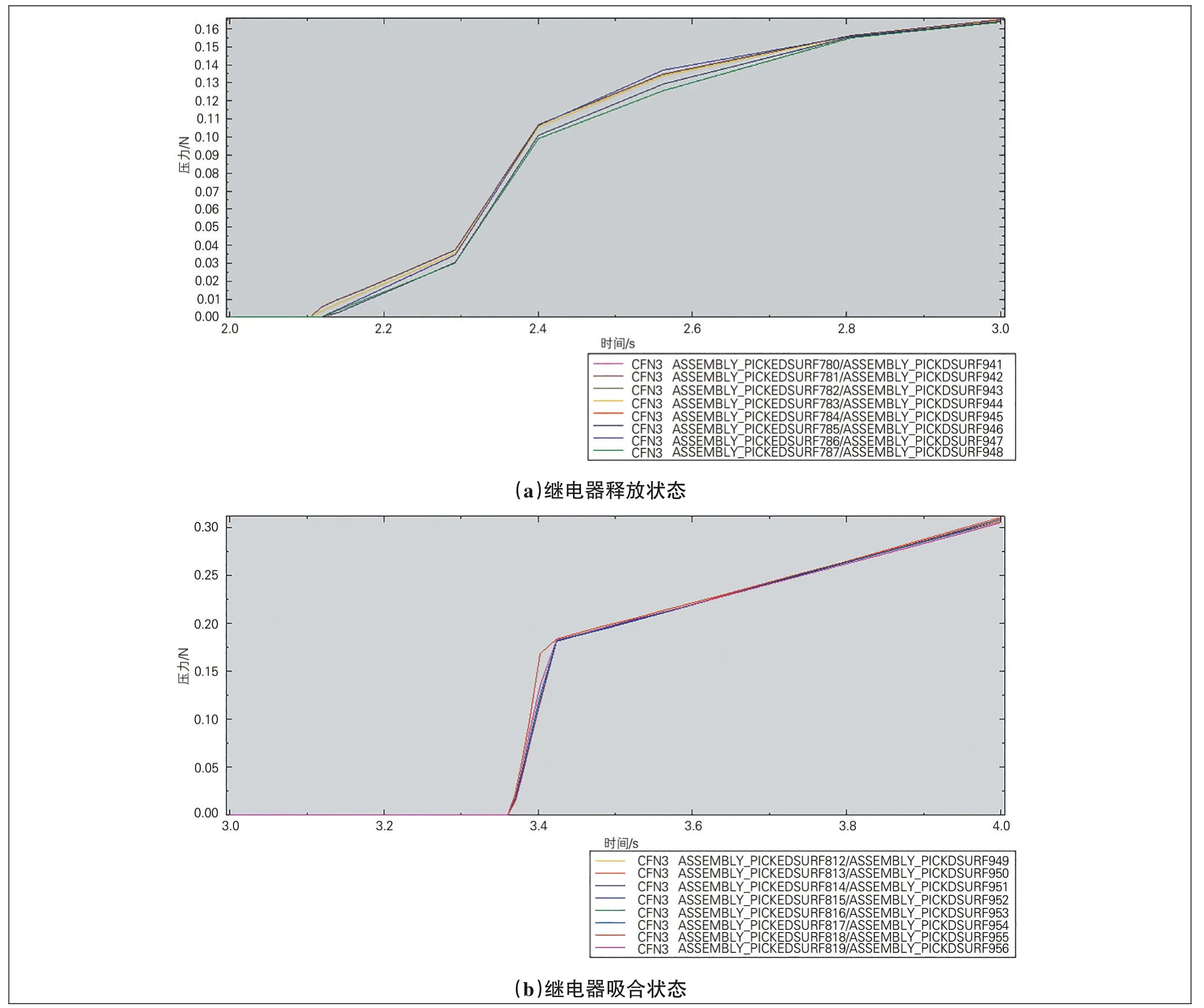
图8 接点压力
(2)继电器的机械反力。线圈通电,衔铁吸合过程中机械负载力的变化见图9。随着衔铁的运动,继电器机械反力逐渐增大,在继电器完全吸合时需克服的反力约为8.2 N。
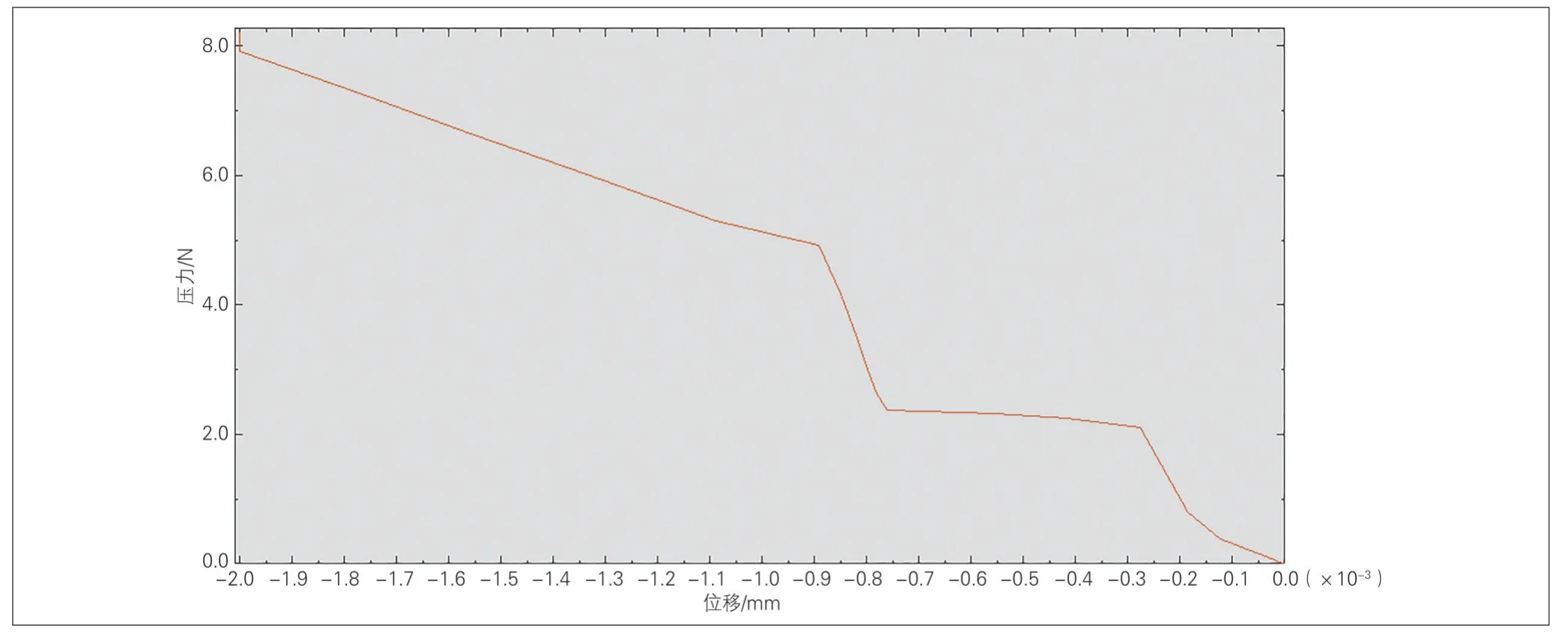
图9 衔铁吸合过程中机械反力
3 数据对比
严格按照信号继电器试验方法[10]的相关规定,对信号继电器样机的机械特性参数进行测试,仿真、计算及实测结果见表4。

表4 信号继电器仿真、计算及实测结果
由此可知,通过有限元仿真的分析结果与计算及实测数据相近,基于Abaqus 的继电器仿真在产品设计阶段具有一定指导意义。
4 结论
基于新型铁路AX 型信号继电器的工作特点以及结构原理,建立接点系统机械反力传统力学计算模型。利用SolidWorks软件建立信号继电器模型,重点论述基于Abaqus 的信号继电器建模方法与参数设置研究。通过样机实测及材料特性分析,确定与实际材料相符的有限元模型参数,构建精确度较高的仿真模型;通过对接触部件绑定约束方法的定义,避免刚体位移的现象,解决了模型收敛问题;最后,通过计算、仿真及实测三方对比,证明基于Abaqus 的信号继电器仿真模型的合理性与准确性,可为产品设计提供依据。
猜你喜欢
科技风(2022年34期)2022-12-14
橡塑技术与装备(2022年8期)2022-08-05
铁路通信信号工程技术(2021年9期)2021-10-04
铁路通信信号工程技术(2021年8期)2021-08-27
模具工业(2021年5期)2021-05-20
砖瓦世界·下半月(2020年6期)2020-10-20
科学导报·学术(2020年14期)2020-10-14
幸福·悦读(2020年6期)2020-07-09
铁道通信信号(2020年8期)2020-02-06
建材发展导向(2019年11期)2019-08-24
