用深度学习和物联网技术设计“AI魔法棒”
2022-05-19 10:56谢作如邱奕盛
中国信息技术教育 2022年9期
谢作如 邱奕盛


涉及学科:物理、技术、艺术
在《哈利·波特》系列电影中有各种各样的魔法棒,配合着不同角度的挥动,就可以实现奇特的效果,如点燃火把、拉开窗帘等。从物理学的角度分析,挥动魔法棒其实是改变魔法棒的运动速度,而衡量运动速度变化的物理量是加速度。从理论上讲,只要给魔法棒安装一个加速度传感器,就能感知所有的速度变化。
恰好,掌控板上自带三轴加速度传感器,那么,能否利用掌控板来准确判断魔法棒的手势呢?实际上很多人都尝试过用掌控板的加速度传感器来识别手势,但都因为编程太复杂、难度太大而放弃。目前,加速度传感器仅仅应用在“摇一摇”的判断和x、y轴的角度识别上,有大材小用的感觉。
● 用加速度识别手势的难度分析
为什么用加速度传感器识别手势很困难呢?因为在魔法棒挥动的过程中,加速度是不断变化的。因此,识别手势需要得到挥动过程中所有的数据变化,需要在手势轨迹中连续采样加速度数值,在得到的一组数据中寻找数据变化的规律。但是,每次人工绘制的手势数据不可能完全相同,总会因为快慢、形状的偏差而产生相近但不相同的数据,这就给编程带来了很大的难度。
在2018年,笔者曾经在本栏目写过《用掌控板体验机器学习》一文,介绍用曼哈顿距离公式来计算两组数据的偏差,即先绘制一次样本数据,作为手势的特征,当新采集的数据与样本数据的手势特征相近,误差小于某个阈值时,就可以识别为正确的手势。然而,这种方式需要人为计算均方根误差,并且不断调整阈值以达到较好的效果,识别算法设计难度高。再加上掌控板的存储和计算资源有限,也很难通过保存多次数据取均值改进识别效果,或者部署AI算法进行识别。
● 换一种思路来识别手势
1.深度学习
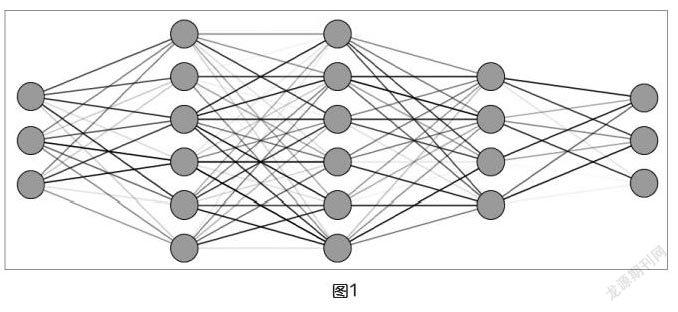
在学习人工智能的时候,大家都知道用机器学习的方式来寻找数据中的关系,是一种非常有效的方式。假设已经拥有一系列不同手势的加速度传感器数据(简称加速度数据集),那么搭建一个BP(Back Propagation)神经网络(如图1),不断将数据“喂给”这个网络模型,就能训练出一个能够识别手势的AI模型。借助于BP神经网络的机器学习,因为拥有神经网络分为多层,属于深度学习中的一种。
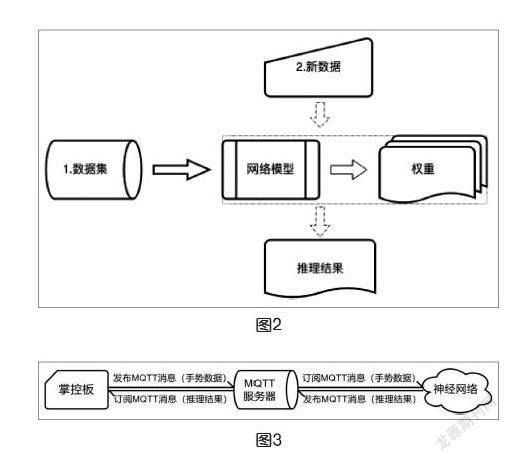
深度学习主要分为数据收集、模型训练和模型推理这三个环节。数据收集也就是制作数据集,类似于人类的学习经验知识库,每条数据包含连续的加速度信息x和手势类别信息y。通过收集大量手势数据,并给数据正确标注类别信息,就可以让机器学习这些数据了。模型训练是让深度学习模型通过不断学习数据集信息,达到手势识别的能力。当模型训练好后,只要输入一组数据,就能输出识别的结果了(如图2)。
2.物联网技术
虽然我们没有办法在掌控板上部署一个深度学习的计算框架,但是可以借助物联网技术,将数据传输到PC机上处理。例如,我们可以通过发送MQTT消息将每条数据传输到物联网平台数据库保存,完成手势数据的收集,也可以将需要识别的手势数据,通过MQTT消息传入PC上的深度学习系统中进行推理(手势识别),然后得到结果(如图3)。
● 手势数据的收集
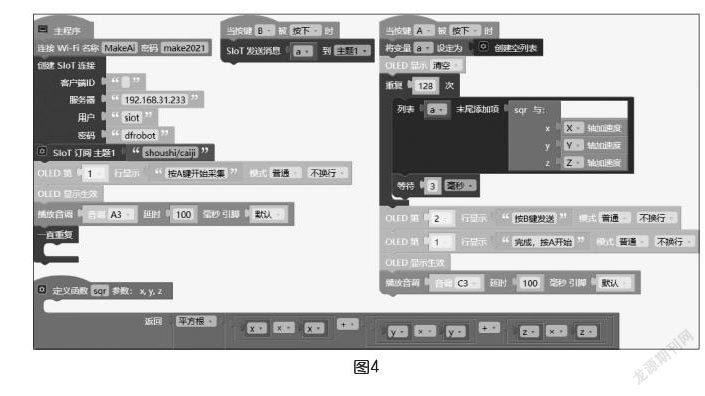
为了手势识别更加准确,笔者规定每一个手势在1秒钟内完成,在这个过程中平均采集128个加速度传感器的数据。采集的程序比较简单,用mPython就能编写。如图4所示,每次按下A键开始采集数据,听到“滴”的一声采集完成,如果确认采集无误,按B键发送到SIoT服务器(消息主题为“shoushi/caiji”)。
重复多次挥动手中的掌控板,在空中画出相同的路径,如画三角形,这样就可以采集多条数据。当数据达到一定数量(笔者分别收集了100条)时,登录SIoT找到对应主题,可以导出数据到本地。然后更换一个手势,如“×”号,重复以上操作。笔者采集的手势分别是三角形、对号、错号、五角星和圆形。
接下来整理数据,为保存到本地的各种手势数据添加标签,保存为csv文件。文件中每行是一条数据,第一个数据是标签名,第二个数据是标签序号,后面的128个数值是一次完整手势轨迹的加速度值序列。
● 手势模型的训练
1.安装MMEdu
深度学习框架有很多,如Keras、TensorFlow、PyTorch等。MMEdu开发团队基于Pytorch和OpenMMLab,简化了神经网络模型搭建和训练的参数,降低了编程的难度,因此笔者以它为例介绍神经网络模型训练环境的搭建。
通过地址gitee.com/openxlab-edu/OpenMMLab-Edu可以下载项目文件。解压后即可使用,在Demo文件夹中能够找到范例代码。MMEdu内置了Pyzo,但笔者推荐使用jupyter作为IDE。
2.训练数据模型
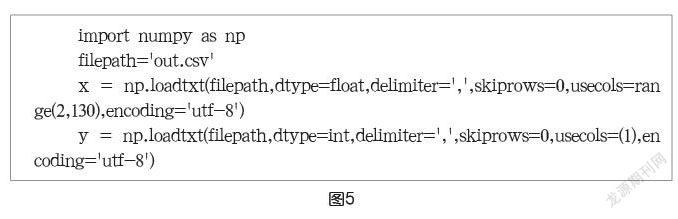
根据数据格式,笔者将第二列作为类别信息y,后面的128个数组成的序列作为加速度数据x,以图5所示的方式读入。
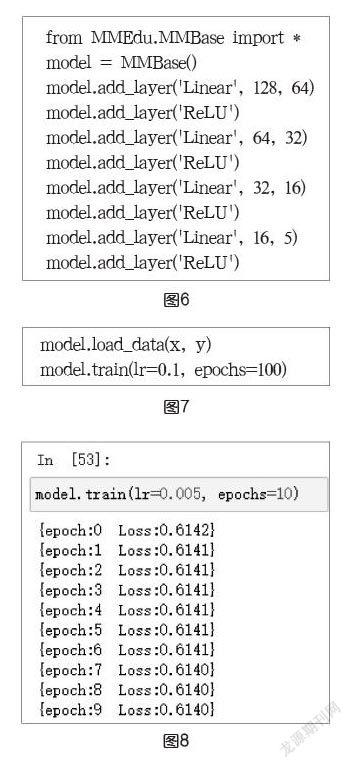
接下来,搭建一个BP神经网络模型进行机器学习,神经网络模型的输入层为128个神经元,因为每条数据有128个特征,输出层为5,所以手势共有5类。中间有3个隐藏层,神经元个数分别为64、32、16,隐藏层的作用是增加模型特征提取的效果。隐藏层层数和神经元个数可以自行调整。每个隐藏层后面紧跟一个激活层,用于增强模型的非线性拟合能力,代码如图6所示。
然后将数据载入到网络中,进行训练。这里的lr指的是学习率,epochs是训练轮数,可以根据实际情况修改(如图7)。每训练一轮,会输出一次训练情况,其中Loss越小,表明学习的效果越好。
如果想在此基础上再继续训练,可以重复执行model.train,也可以修改其中的参数lr和epochs继续训练,以达到较好的效果(如图8)。
当效果满意时,也就是当Loss数字不再明显下降时,就可以停止训练,执行model.save("mynet.pkl")来保存模型。
● AI魔法棒的部署和测试
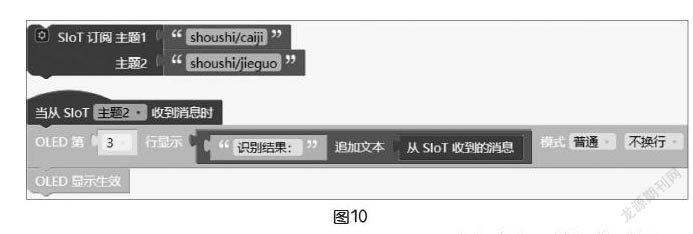
笔者将训练好的模型部署在计算机上,将从SIoT的主题shoushi/caiji收到的信息传入神经网络进行推理,根据推理结果决定是否发送消息给SIoT的主题shoushi/jieguo。代码编写如图9所示。
在掌控板原来代码的基础上,添加一段代码,使得在掌控板上也能查看识别的结果(如第108页图10)。
经过上述步骤的操作,基本已经完成了部署。接下来,就可以测试一下“AI魔法棒”的效果了。识别率还不错,大部分情况能够正确分辨出所做的手势(如图11)。
● 小结
当实现了对魔法棒的“手势”识别后,下一步就是要实现一些有趣的创意功能了,如识别出手势后点亮不同的LED或者在屏幕上显示相应的图案。当然,这样还太简单,因为笔者的实验室部署了智能家居系统,并且部署了HASS(具体请参考前几期的文章),那么这个魔法棒就能和智能家居结合了。例如,画个圆形灯光就点亮,画个心形灯光就变成粉色,画个“×”号灯就关闭等,是不是很有魔法的感觉?
有了深度学习和物联网技术的加持,学生各種天马行空的想象都更有可能成为现实。那么,还等什么,当人工智能遇上物联网,精彩的世界正拉开帷幕。
猜你喜欢
中国教育信息化·高教职教(2022年4期)2022-05-13
计算技术与自动化(2022年1期)2022-04-15
煤气与热力(2022年2期)2022-03-09
红领巾·萌芽(2019年9期)2019-10-09
软件(2017年6期)2017-09-23
新高考·教师版(2016年2期)2017-07-05
小学阅读指南·低年级版(2017年6期)2017-06-12
中学生数理化·高一版(2016年8期)2016-12-07
新高考·高一物理(2015年5期)2015-08-18
新高考·高一物理(2015年5期)2015-08-18