
基于八链码形状匹配的抽油机井地面示功图凡尔开闭点识别
2022-05-19 13:05周斌邢林林张敏
科学技术与工程 2022年12期
周斌, 邢林林, 张敏
(山东理工大学计算机科学与技术学院, 淄博 255000)
在石油开采中抽油机井一直占居首要地位,及时、准确地掌握油井采油生产状况对提高油田整体经济效益具有重大意义。示功图是直接了解油井工作状况的主要手段,对示功图进行量化分析有助于油井工况诊断[1-2]和油井功图计产[3-4]。抽油机井各种工况示功图基本上都具有不同的几何特征,具体主要表现为示功图凡尔开闭点位置变化[5-7]。因此,精准识别示功图凡尔开闭点位置对示功图的精确量化分析尤为重要。
目前抽油机井示功图凡尔开闭点识别方法主要有:基于泵示功图识别方法、基于地面示功图识别方法。多数示功图凡尔开闭点识别方法是基于泵示功图识别的,主要是在分析泵示功图(由实测地面示功图或实测电参数通过相应模型计算得到)曲线几何特征基础上,利用拐点曲率变化最大[8-12]、拐点法线方向变化最大[13]、四方向链码无限光滑压缩与两种多边形近似后拐点变化[14-15]等方法进行凡尔开闭点识别。目前对基于地面示功图凡尔开闭点识别方法的研究很少,主要是根据凡尔开闭点物理意义,在对实测地面示功图上凡尔开闭点位置理论分析基础上,利用分区、多种去噪、穷举比较寻找最优解策略进行凡尔开闭点识别[5]。以上研究取得了较好的成效,但仍存在一定局限性:一是在以泵示功图为研究载体的识别方法中,阻尼系数问题会导致模型计算结果与实际测量值之间存在一定的精度误差;二是在机电液耦合复杂系统中,大量的噪声或过多的去噪都会干扰到有用的原始数据点,易产生误判现象;三是受链码方向个数和匹配多边形个数限制,原有的采用四方向链码对示功图轮廓提取结果比较粗化且匹配的多边形有限,会影响凡尔开闭点的精确定位;四是对数据点无限光滑压缩、穷举比较等策略不适合对海量实时数据快速处理。上述局限性影响了已有示功图凡尔开闭点识别方法的实际应用。
大数据生产环境下,抽油机井采油生产系统获取了大量实时数据。针对目前抽油机井示功图凡尔开闭点识别研究的局限性,结合大数据下采油生产特点,探讨如何有效运用图像处理方法,利用实测地面示功图来进一步提高凡尔开闭点识别精准性和实用性,对采油生产和采油工程都具有重要的研究和应用价值。
抽油机井地面示功图是由光杆上悬点载荷与悬点位移组成的二值图像,受油井地面、井筒和地层多方位因素影响,地面示功图复杂多变。有研究表明:八方向链码可以快速、精准地提取复杂二值图像轮廓[16-19]。链码方向个数的增加表明可以匹配的图形形状个数也会增加,有利于目标的精准匹配。设置合适的迭代次数可以快速、有效地进行图像处理。基于此,提出一种基于八方向链码形状匹配的抽油机井地面示功图凡尔开闭点识别方法。在对抽油机井理论示功图和凡尔开闭点物理表示意义理论分析基础上,首先用自定义的八方向链码对预处理后的实测地面示功图进行轮廓提取,再建立图形形状匹配库,然后在设定的迭代次数内进行轮廓光滑和重复链码压缩直至得到与匹配库内相匹配的图形形状,最后根据匹配的图形形状定位凡尔开闭点。利用胜利油田某区块1 650个实测地面示功图样本,从凡尔开闭点定位、工况识别两方面进行验证。
1 抽油机井理论示功图和凡尔开闭点物理表示意义
抽油机井理论示功图是在光杆只受抽油杆柱与活塞截面积以上液柱的静载荷影响下绘制的,如图1所示。
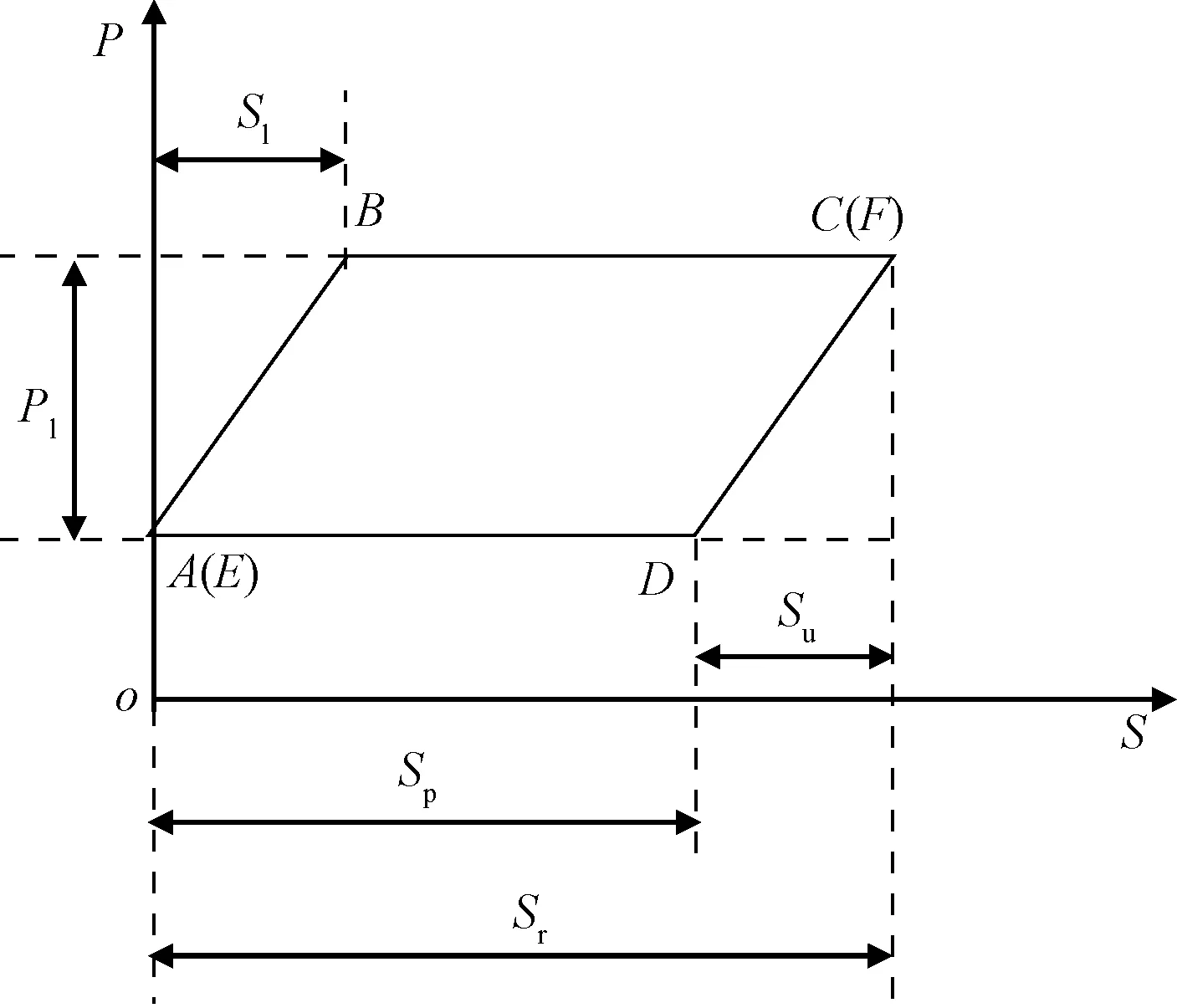
S为光杆位移,m;P为光杆上载荷,kN;Sr为光杆冲程;Sp为活塞冲程(有效冲程);Sl为加载冲程损失;Su为卸载冲程损失;Pl为活塞上液柱重量;A(E)、B、C(F)、D点为凡尔点,其中A(E)为游动凡尔关闭点(即下死点),B为固定凡尔打开点,C(F)为固定凡尔关闭点(即上死点),D为游动凡尔打开点;A(E)→B→C(F)→D→A(E)表示一个冲程,即抽油泵的一个工作周期,其中A(E)→B→C(F)表示上冲程,是加载并做功过程,C(F)→D→A(E)表示下冲程,是卸载并做功过程图1 理论示功图Fig.1 Theoretical dynamometer card
受砂、蜡、水、气、供液、稠、振动、漏失等多种因素影响,实测地面示功图比理论示功图图形复杂很多[20],凡尔在打开和关闭时会出现延迟或提前现象,游动凡尔关闭点(A点)和下死点(位移最小点,E点)、固定凡尔关闭点(C点)和上死点(位移最大点,F点)都会出现不重合现象。
2 基于八方向链码形状匹配的地面示功图凡尔开闭点识别方法
2.1 数据预处理
数据采集规范化处理。从抽油机井采油生产现场采集的地面示功图数据由多个离散数据点组成,并且都以下死点为位移最小点,即示功图数据的起始点(漂移情况不考虑) ,上死点为位移最大点,每个示功图采集的数据点总数是一样的。
数据归一化处理。地面示功图中每个数据点都是由一组不同的位移值和载荷值组成,采用式(1)将示功图数据归一化到[0,1]范围。
(1)
式(1)中:n=1,2,…,N,N为每个示功图含有的数据点总数;dn和ln分别为示功图中每个数据点的位移值和载荷值;dmax和dmin分别为示功图数据中位移的最大值和最小值,lmax和lmin分别为示功图数据中载荷的最大值和最小值。
2.2 链码轮廓提取
2.2.1 八方向链码定义
地面示功图数据归一化后,通过式(2)可以得到地面示功图数据中每个数据点的角度。
an=arctan[(ln-ln-1)/(dn-dn-1)]
(2)
式(2)中:an为示功图中每个数据点的角度,n=2,3,…,N,N为每个示功图含有的数据点总数。
地面示功图中第一个数据点的角度计算公式为
a1=arctan[(l1-lN)/(d1-dN)]
(3)
传统的八方向链码中,方向符数字0、1、2、3、4、5、6、7分别表示八方向链码的8个方向,即0°、45°、90°、135°、180°、225°、270°、315°。通过对抽油机井理论示功图的分析可知,下冲程阶段是从固定凡尔关闭点(即上死点)开始到游动凡尔关闭点(即下死点)结束的一个过程,也是位移逐渐减小的一个过程,在这个过程中,由式(2)计算得到的角度会出现负角度。实测地面示功图图形复杂多变,为了更精准地描述实测地面示功图轮廓,通过式(4)重新定义了八方向链码。
(4)
式(4)中:Cn为功图中每个数据点的链码方向符数字,n=1,2,…,N。
2.2.2 地面示功图链码轮廓提取
通过式(2)~式(4)得到实测地面示功图中每个数据点的方向符数字后,原始的由多个离散数据点组成的地面示功图转变成了由多个0~7数字形成的图形,完成了对实测地面示功图的链码轮廓提取。八方向链码轮廓提取后的地面示功图样例如图2所示。
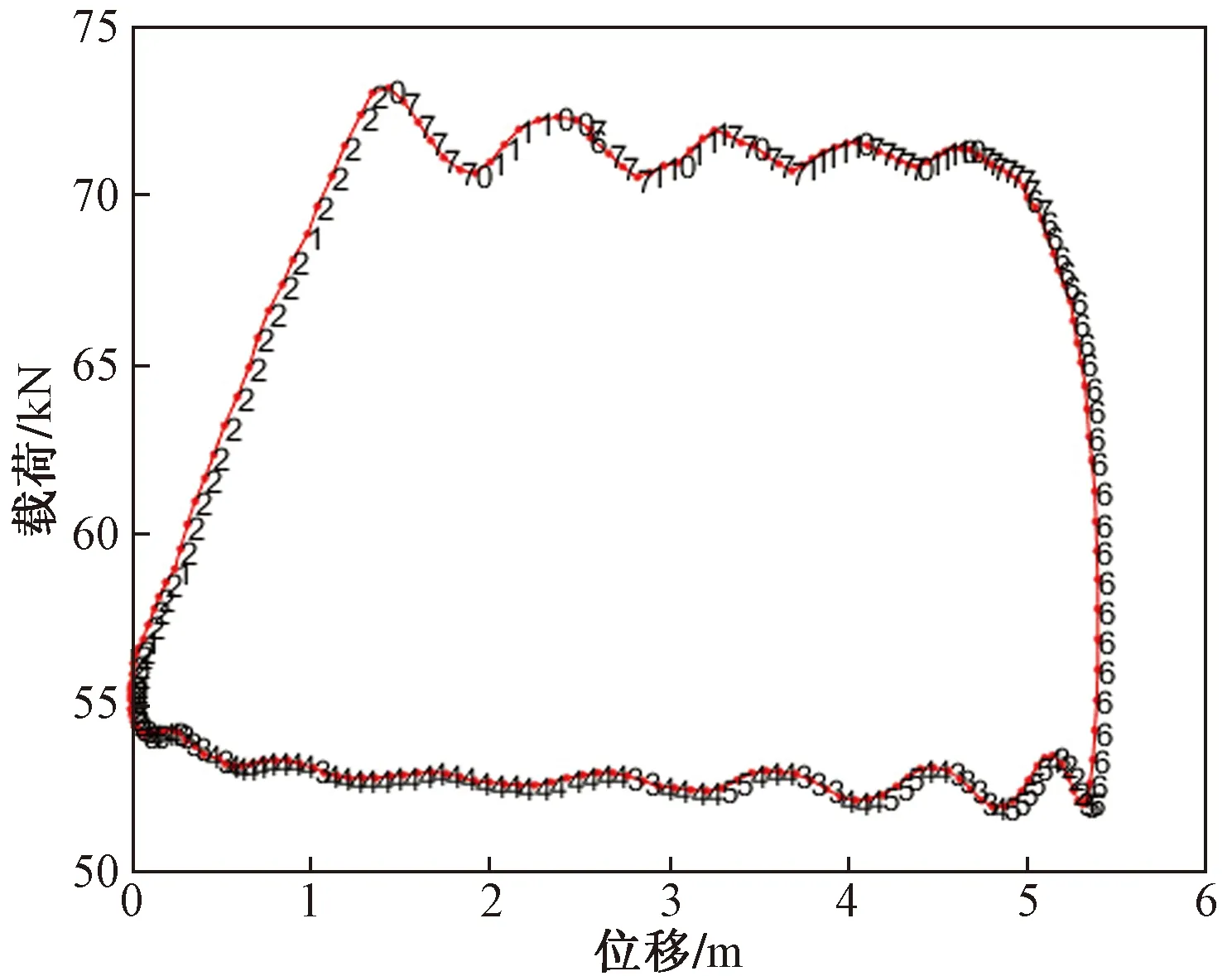
图2 八方向链码轮廓提取后的地面示功图样例Fig.2 Example of surface dynamometer card contour extraction based on 8-direction chain code
2.3 形状匹配
2.3.1 形状匹配库建立
目前在基于泵示功图和链码的凡尔开闭点识别研究中,主要采用四方向链码提取功图轮廓,用两个多边形(四边形和六边形)匹配多次光滑、压缩后形成的链码轮廓图形形状[14-15]。对于复杂多变的地面示功图,其链码轮廓在多次光滑、压缩后形成的图形形状也会是多变的,若匹配的图形形状个数只有上述两种时会影响到凡尔开闭点的精确定位。随着方向个数的增加,八方向链码提取的功图轮廓能匹配的图形形状个数也会增加。
为确保算法的稳健性,建立形状匹配库,存储多个用于匹配的链码图形形状。这个形状匹配库是可以补充更新的。通过对大量实测地面示功图八方向链码轮廓图形形状(2 000次数内光滑和压缩后形成)的分析和比较,目前提取出8个用于匹配的链码图形形状,对应的链码分别是:[2, 1, 0, 7, 6, 5, 4, 3](八边形)、[2, 1, 0, 7, 6, 5, 4, 5, 6, 5, 4, 3](十二边形)、[2, 1, 0, 7, 6, 5, 4, 5]、[2, 1, 0, 7, 6, 5, 4]、 [2, 0, 7, 6, 5, 4]、[2, 7, 6, 5, 4, 3]、[2, 7, 6, 5, 4]、 [2, 1, 0, 7, 6, 5, 4, 5, 6, 5, 4]。形状匹配库中八边形和十二边形适用于绝大多数地面示功图的匹配,其中十二边形主要适用于右下角有凹面的图形。
2.3.2 图像平滑
采用平均法实现对地面示功图的平滑,就是对地面示功图中的所有数据点(第一数据点和最后一个数据点除外)采用相邻3点的平均值取代中间点的值来产生功图平滑效果。该方法对地面示功图具有去噪作用,可表示为
(5)
式(5)中:n=2,3,…,N-1,N为每个示功图含有的数据点总数;Dn和Ln分别为每个数据点的相邻3点的位移平均值和载荷平均值。Dn和Ln不加入下一点的运算,dn、ln和Dn、Ln是两个独立的数组。
地面示功图中第一个数据点和最后一个数据点的计算公式为
(6)
式(6)中:D1、L1和DN、LN都不加入下一点的运算。
2.3.3 链码压缩
链码压缩的目的是移除掉连续重复的链码方向符数字,从而得到一个具有唯一识别特征的链码图形形状。采用一阶差分实现链码压缩。如链码[2, 2, 1, 1, 1, 0, 0, 0, 7, 7, 0, 0, 0, 6, 6, 6, 5, 5, 4, 4, 4, 3],压缩后的链码为[2, 1, 0, 7, 0, 6, 5, 4, 3]。
2.3.4 迭代法形状匹配
迭代法形状匹配是指采用八方向链码提取地面示功图轮廓,通过一定迭代次数的图像平滑、链码压缩,直至得到和形状匹配库里相匹配的链码图形形状。比如上述压缩后的链码[2, 1, 0, 7, 0, 6, 5, 4, 3],与形状匹配库里的链码图形形状都不匹配,得需经过几次或多次迭代次数的平滑和压缩处理,直到满足匹配后终止。这一过程中迭代次数的选择是确保可以快速且有效进行图像处理的关键。通过大量地面示功图实例验证,选用2 000次迭代次数。如果超过这个迭代次数后还没有匹配成功就停止迭代,将迭代停止后的压缩链码图形形状补充至形状匹配库中,再重新进行匹配。
2.4 凡尔开闭点定位
对于形状匹配库中的8个链码,分别采用如下规则进行凡尔开闭点的定位。
链码[2, 1, 0, 7, 6, 5, 4, 3](八边形)中有7个拐点,从左至右排序为:2→1、1→0、0→7、7→6、6→5、5→4、4→3。第1个拐点(2→1)、第4个拐点(7→6)、第5个拐点(6→5)分别对应凡尔开闭点中的B点、C点、D点,其中B点和D点坐标为对应拐点中跃变前的那个点的坐标,C点坐标为对应拐点中跃变后的那个点的坐标。由于每个地面示功图数据采集时都是从下死点开始,故A点为原始地面示功图中的第一个点。
链码[2, 1, 0, 7, 6, 5, 4, 5] 、[2, 1, 0, 7, 6, 5, 4]中4个凡尔开闭点的定位和坐标取值策略同链码[2, 1, 0, 7, 6, 5, 4, 3](八边形)一样。
链码[2, 0, 7, 6, 5, 4]中有5个拐点,第1个拐点(2→0)、第3个拐点(7→6)、第4个拐点(6→5)分别对应凡尔开闭点中的B点、C点、D点。4个凡尔开闭点的坐标取值策略如上所述。
链码[2, 7, 6, 5, 4, 3] 、[2, 7, 6, 5, 4]中第1个拐点(2→7)、第2个拐点(7→6)、第3个拐点(6→5)分别对应凡尔开闭点中的B点、C点、D点。4个凡尔开闭点的坐标取值策略同上。
链码[2, 1, 0, 7, 6, 5, 4, 5, 6, 5, 4, 3](十二边形)中有11个拐点,第1个拐点(2→1)、第4个拐点(7→6)、第9个拐点(从左至右第2个6→5拐点)分别对应凡尔开闭点中的B点、C点、D点,这三点坐标分别为对应拐点中跃变后的那个点的坐标,A点仍为原始地面示功图中的第1个点。
链码[2, 1, 0, 7, 6, 5, 4, 5, 6, 5, 4]中4个凡尔开闭点的定位和坐标取值策略同链码[2, 1, 0, 7, 6, 5, 4, 5, 6, 5, 4, 3](十二边形)一样。
2.5 基于八方向链码形状匹配的地面示功图凡尔开闭点识别流程
基于八方向链码形状匹配的地面示功图凡尔开闭点识别流程具体如图3所示。

图3 基于八链码形状匹配的地面示功图凡尔开闭点识别流程图Fig.3 Flow diagram of the valve opening and closing points recognition in surface dynamometer cards based on 8-direction chain code and shape matching
3 应用实例
选用胜利油田某区块(典型的高压低渗稀油油藏区块)1 650个实测地面示功图实例作为研究对象,其中包含11种油井工况:正常、供液不足、抽油杆断脱、连抽带喷、泵卡、泵游动凡尔失灵、结蜡、油管漏失、泵漏、游动凡尔漏失、固定凡尔漏失。分别采用本文所提基于八方向链码形状匹配凡尔开闭点识别方法(eight-direction chain code and shape matching method,ECCSM)、已有的基于四方向链码多边形近似凡尔开闭点识别方法(four-direction chain code and polygonal approximation method,FCCPA,该方法在链码方向上舍去了-135°~-45°[14-15])和改进的基于四方向链码多边形近似凡尔开闭点识别方法(improved four-direction chain code and polygonal approximation method,IFCCPA,该方法将FCCPA方法中舍去的链码方向补充完整)从凡尔开闭点定位、工况识别两方面进行应用结果对比。
3.1 凡尔开闭点定位结果与分析
为了验证方法的有效性,结合凡尔开闭点物理表示意义,实验从4个方面进行:①理论示功图的凡尔开闭点定位结果;②11种油井工况地面示功图的凡尔开闭点定位结果;③分别采用ECCSM、IFCCPA和FCCPA 3种凡尔开闭点识别方法对正常和供液不足两种油田最常见抽油机井工况进行凡尔开闭点定位结果对比;④单油井理论日产液量功图计算精度分析。
3.1.1 理论示功图的凡尔开闭点定位结果
理论示功图的凡尔开闭点定位结果示意图如图4所示。可以看出,抽油泵的4个凡尔开闭点应该位于功图的4个顶点。由图4可知,该方法提取出的4个点都在平行四边形的4个顶点处,说明定位结果是准确的。
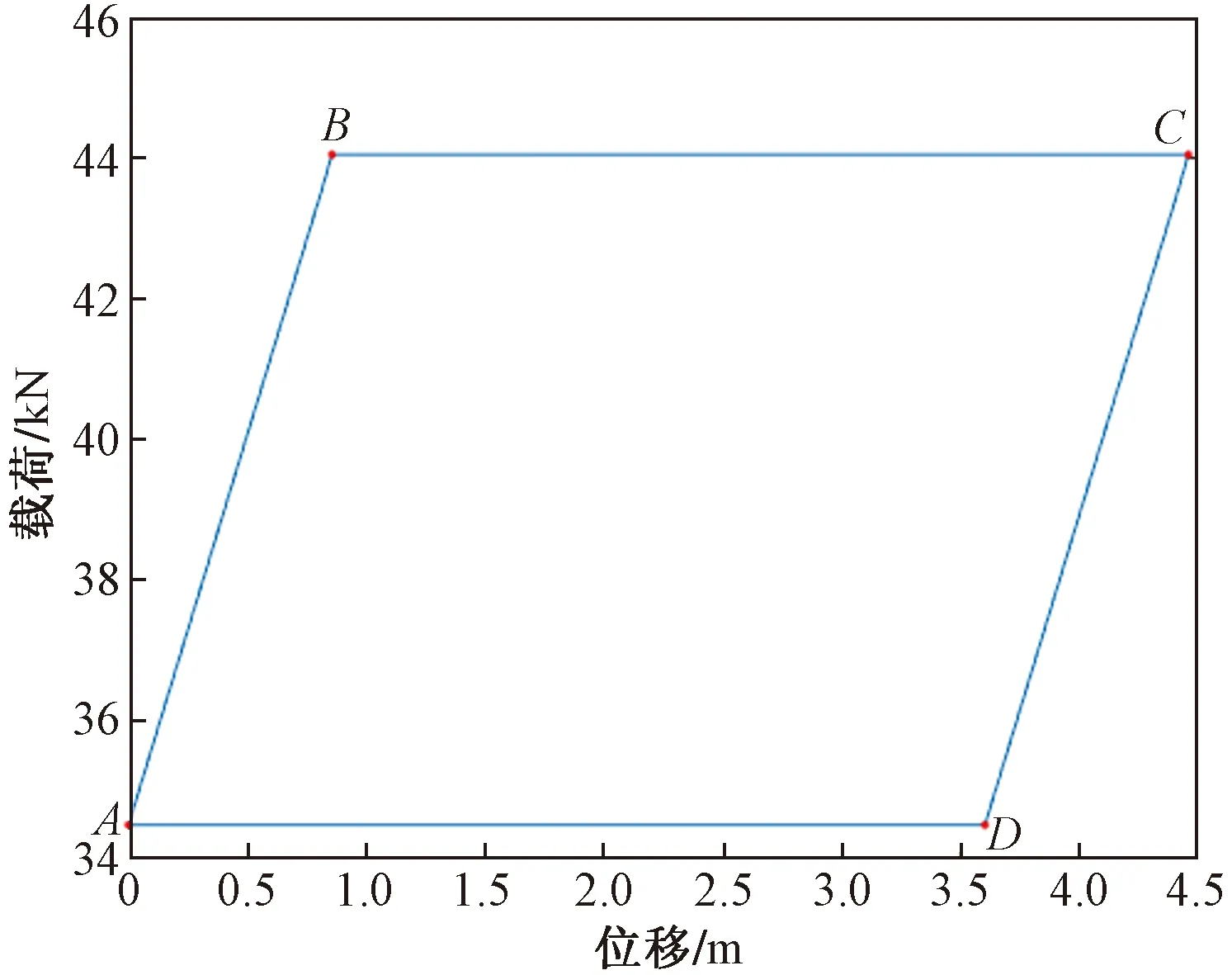
图4 理论示功图的凡尔开闭点定位结果示意图Fig.4 Sketch map of the valve opening and closing points location in theoretical dynamometer card
3.1.2 11种抽油机井工况地面示功图的凡尔开闭点定位结果
11种抽油机井工况地面示功图的凡尔开闭点定位结果如图5所示。受地面、井筒、地层多方位因素影响,油井工况复杂多变,实测地面示功图因而形状迥异,给凡尔开闭点的精确定位带来很大干扰影响。但通过采用自定义的八方向链码对预处理后的地面示功图进行轮廓提取,建立形状匹配库,在限定的迭代次数内进行轮廓光滑和链码压缩直至形状匹配成功,再根据匹配形状定位规则可以实现对凡尔开闭点的精准识别。
3.1.3 两种常见工况下不同方法对地面示功图的凡尔开闭点定位结果对比
两种常见工况下不同方法对地面示功图的凡尔开闭点定位结果对比如图6所示。由于在提取地面示功图轮廓时链码方向舍去了-135°~-45°,这会影响游动凡尔打开点(D点)的定位。根据机理分析可知,两种工况下,游动凡尔打开点(D点)定位应靠近最右下角拐点,但从图6中可以看到FCCPA方法对两种工况的游动凡尔打开点(D点)的定位明显远离最右下角拐点,都比ECCSM和IFCCPA两种凡尔开闭点识别方法的定位小很多,所以ECCSM和IFCCPA两种识别方法比FCCPA识别方法对凡尔开闭点的定位要合理;虽然链码方向全角度下提取地面示功图轮廓,但链码方向个数的限制使得能匹配的图形形状有限,这也会影响凡尔开闭点的定位[游动凡尔关闭点(A点)除外,该点定位于预处理后功图数据的起始点]。图6中,两种工况下,IFCCPA方法与ECCSM方法相比,对固定凡尔打开点(B点)和游动凡尔打开点(D点)的定位都较远离功图对应拐点,所以ECCSM凡尔开闭点识别方法对实测地面示功图凡尔开闭点的定位相对更合理一些。
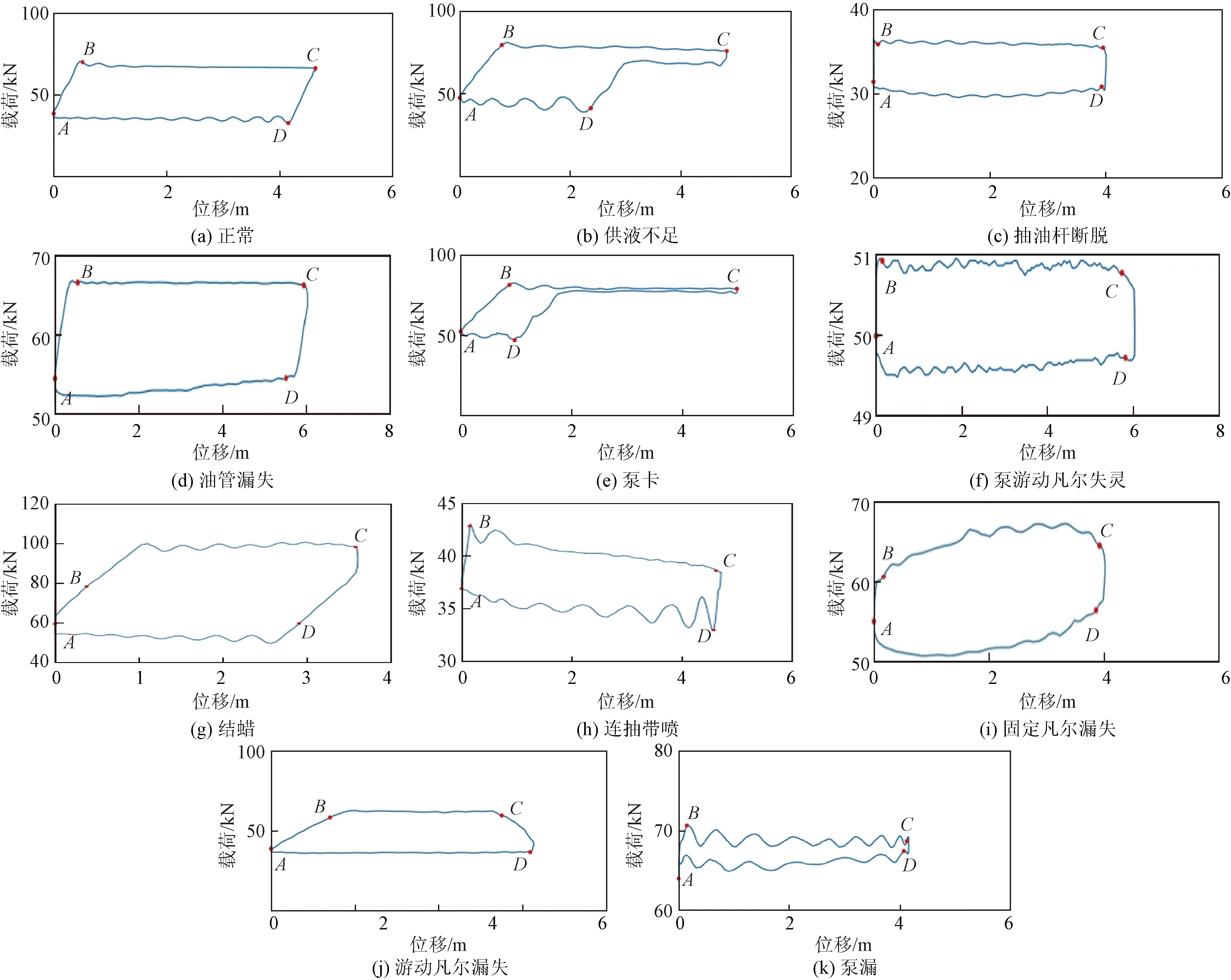
图5 11种抽油机井工况地面示功图的凡尔开闭点定位结果Fig.5 Results of the valve opening and closing points location in surface dynamometer cards of eleven kinds of working conditions from sucker-rod pumping wells
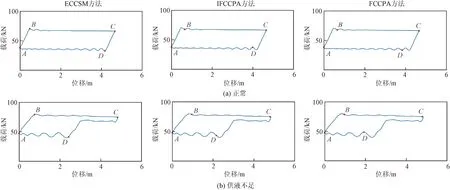
图6 两种常见工况下不同方法对地面示功图的凡尔开闭点定位结果对比Fig.6 Comparison results of the valve opening and closing points location of surface dynamometer cards by different methods in two kinds of common working conditions
3.1.4 单油井理论日产液量功图计算精度分析
抽油机井功图量油中单油井理论日产液量计算公式[9,13]
Qp=1 440SpApnfre
(7)
式(7)中:Qp为日产液量,m3/d;Sp为活塞有效冲程,m;Ap为活塞横截面积,m2;nfre为冲次,min-1。
从式(7)可以看出,单油井日产液量功图计算精度主要和Sp关联,Sp等于游动凡尔打开点(D点)和关闭点(A点)之间位移差(图1)。从图6可以得出,采用ECCSM凡尔开闭点识别方法计算得到的Sp精度更高,由此计算得到的日产液量精度也更高。
3.2 工况识别结果对比
此部分所用抽油机井工况样本库根据60口抽油机井的油井作业记录建立,包含11种工况(图5),每种工况有150个样本,共1 650个样本。
实测地面示功图有12个特征参数:冲程、冲次、示功图实际面积、最大和最小载荷、最大最小载荷比、活塞上液注重量、有效冲程、加载和卸载冲程损失、提前加载和卸载位置[21]。其中有效冲程、加载和卸载冲程损失、提前加载和卸载位置5个特征参数值的计算是通过对地面示功图凡尔开闭点位置的提取来实现的。具体计算如下。
冲程、冲次、最大和最小载荷不用计算,可从地面示功图数据中直接获得;功图实际面积为示功图采集点所围成的封闭曲线面积;最大最小载荷比为最大载荷与最小载荷的比值;活塞上液柱重量为最大载荷与最小载荷之差;有效冲程为游动凡尔打开点(D点)与游动凡尔关闭点(A点)之间的位移差;加载冲程损失为固定凡尔打开点(B点)与游动凡尔关闭点(A点)之间的位移差;卸载冲程损失为固定凡尔关闭点(C点)与游动凡尔打开点(D点)之间的位移差;提前加载位置是从游动凡尔关闭点(A点)开始到游动凡尔打开点(D点)之间斜率正负反向的第一个点的位移;提前卸载位置是从固定凡尔关闭点(C点)开始到固定凡尔打开点(B点)之间斜率正负反向的第一个点的位移。
实验时将样本库中的1 650个工况样本平均分成训练集和测试集2部分,各包含825个样本,其中每种工况均包含75个样本。
采用支持向量机(support vector machine,SVM)一对一两分类器。测试集中样本数有825个,其中11个大类中每类的正例样本数和反例样本数均为75个。识别正确率为测试集中分类正确的样本数占样本总数的比例[22]。重复做5次实验,每次实验的训练集和测试集都不一样。
最后,用上述3种凡尔开闭点识别方法分别与SVM一对一两分类器结合形成3种抽油机井工况识别方法:基于八方向链码形状匹配凡尔开闭点识别的支持向量机工况识别方法,SVM_ECCSM;基于四方向链码多边形近似凡尔开闭点识别的支持向量机工况识别方法,SVM_FCCPA;基于改进的四方向链码多边形近似凡尔开闭点识别的支持向量机工况识别方法,SVM_IFCCPA。分别采用这3种工况识别方法对抽油机井工况的识别结果进行对比。将5次实验结果的平均值作为最终实验结果,具体如表1所示。
工况识别结果分析如下。
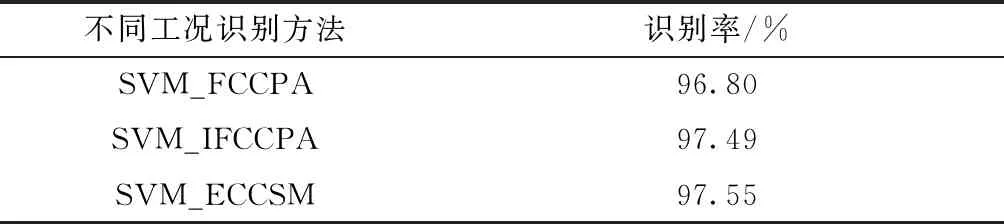
表1 不同凡尔开闭点识别方法下工况识别结果对比Table 1 Comparison results of the working condition recognition based on different valve opening and closing points recognition methods
(1)基于八方向链码形状匹配凡尔开闭点识别的支持向量机工况识别方法(SVM_ECCSM)比基于四方向链码多边形近似凡尔开闭点识别的支持向量机工况识别方法(SVM_FCCPA)和基于改进的四方向链码多边形近似凡尔开闭点识别的支持向量机工况识别方法(SVM_IFCCPA)对抽油机井工况的识别率分别提高了近1%和0.1%。所提基于八方向链码形状匹配凡尔开闭点识别方法更有助于对抽油机井工况的精准识别。
(2)在同一口油井、同一个实测地面示功图的12个特征参数中,有效冲程、加载和卸载冲程损失、提前加载和卸载位置这5个特征参数值的变化直接影响上述3种工况识别方法对抽油机井工况的识别效果,而凡尔开闭点的定位精准性又直接影响这5个特征参数值的变化。采用链码全角度提取地面示功图轮廓,IFCCPA方法比FCCPA方法对凡尔开闭点的定位较合理,故SVM_IFCCPA方法比SVM_FCCPA方法对抽油机井工况的识别效果好;除采用链码全角度提取功图轮廓外,还采用形状匹配库进行形状匹配,所提凡尔开闭点识别方法(ECCSM)比IFCCPA方法对凡尔开闭点的定位更合理,故SVM_ECCSM 方法比SVM_IFCCPA方法能进一步提高对抽油机井工况的识别效果。
4 结论
(1)提出一种基于八方向链码形状匹配的抽油机井地面示功图凡尔开闭点识别方法,该方法通过分析理论示功图和凡尔开闭点物理表示意义,采用自定义八方向链码进行轮廓提取、建立图形形状匹配库、设置合适的迭代次数进行轮廓光滑、链码压缩直至形状匹配成功等方式进行地面示功图凡尔开闭点识别,提高了算法的稳健性。实例应用结果表明该方法比已有的和改进的基于四方向链码多边形近似凡尔开闭点识别方法对凡尔开闭点的定位更精准。
(2)该方法利用实测地面示功图进行凡尔开闭点识别,克服了在以泵示功图为研究载体的识别方法中不可避免出现的模型计算结果与实际测量值之间存在精度误差问题;设定合适的迭代次数进行数据点平滑(去噪)、压缩和形状匹配,既可以降低对有用原始数据点的干扰,减少误判现象的发生,又可以快速、有效地处理海量实时数据,更适合于大数据环境下的采油生产;建立可以补充更新的形状匹配库,更有利于凡尔开闭点的精确定位。实例应用结果表明:在正常和供液不足两种油井常见工况下功图计产方面,该方法计算得到的有效冲程精度更高,由此得到的日产液量精度也更高;在抽油机井工况识别方面,基于该方法的识别效果比已有的基于四方向链码多边形近似凡尔开闭点识别方法提高了近1%,从而进一步提高了该方法的工程实用性。
猜你喜欢
石油石化节能(2022年12期)2022-12-30
中国管理信息化(2021年20期)2021-11-12
初中生学习指导·中考版(2021年9期)2021-09-27
石油石化节能(2020年9期)2020-09-29
科教新报(2020年21期)2020-06-05
中国管理信息化(2020年9期)2020-05-28
现代计算机(2018年27期)2018-10-25
汽车之友(2017年2期)2017-04-14
电子制作(2017年24期)2017-02-02
中国煤层气(2014年6期)2014-08-07
