
摄影测量技术在飞机装配中的应用
2022-05-21 23:03候伟,王声,罗宇,侯志鹏,鲁钟文
今日自动化 2022年2期
关键词:摄影测量
候伟,王声,罗宇,侯志鹏,鲁钟文
[摘 要]摄影测量技术属于近年来在飞机装配领域中最前沿的数字化检测技术之一,它以较低的经费、灵活的操作、较高的检测精度、大部件及大测量范围等特点在数字化制造及检测领域得到了迅速的推广。文章介绍了摄影测量系统的组成、摄影测量技术的原理及特征,并选取典型装配件对摄影测量技术在飞机装配中的实施方案及检测步骤进行讨论。
[关键词]摄影测量;反光标志;基准尺;激光跟踪仪;V-STARS软件;Geomagic软件
[中图分类号]V262.4 [文献标志码]A [文章编号]2095–6487(2022)02–00–03
Application of Photogrammetry Technology in Aircraft Assembly
Hou Wei,Wang Sheng,Luo Yu,Hou Zhi-peng,Lu Zhong-wen
[Abstract]Photogrammetry technology is one of the most advanced digital inspection technologies in the field of aircraft assembly in recent years. It has been rapidly popularized in the field of digital manufacturing and testing due to its low cost, flexible operation, high detection accuracy, large components and large measurement range. Based on this, the article first briefly expounds the composition of the photogrammetry system, further introduces the principle and characteristics of photogrammetry technology in detail, selects typical assemblies to discuss the implementation plan and detection steps of photogrammetry technology in aircraft assembly, and makes the majority of scientific and technological workers Can quickly understand and master this key and core technology.
[Keywords]photogrammetry; reflective signs; datum ruler; laser tracker; V-STARS software; Geomagic software
由于飛机大部件具有结构复杂、外形尺寸大的特点,按传统工艺方法,对飞机气动外形的检测往往依赖于工装卡板、模线样板等,无法对飞机外形进行准确检测,而与其他国内的数字化测量技术手段如:激光跟踪仪、电子经纬仪、电子全站仪、室内GPS(iGPS)、激光雷达相比,摄影测量技术具有测量精度高、测量速度快、测量范围的尺寸大、操作灵活、便携性强、环境适应性高(不易受温度变化、振动等外界因素的干扰)、无需开机预热、价格相对便宜等诸多卓越优势,而迅速且广泛地应用到飞机装配测量领域中。
摄影技术是通过照相的方式取得被拍摄的形状及大小,以设置的基准尺为参考,将拍摄的被测物体进行三维空间理论数值进行转化或拟合的一种先进测量技术。本文所涉及的摄影测量是以V-STARS系统为核心的。V-STARS系统全称为Video-Simultaneous Triangulation and Resection System,是一种用于近景摄影的三维坐标测量系统,由美国GSI公司于1994年提出,经长期实践应用,该系统性能已得到肯定。V-STARS系统三维测量相对精度较高,最高为1/20万,可在热真空等恶劣环境中持续工作,此外,该测量系统的自动化程度较高,摄影测量速度快速,凭借上述优势,V-STARS系统现已成为国际热门数字摄影测量系统。从本质上来看,V-STARS系统是以数字摄影为基础搭建的三维坐标测量系统,又被称之为数字近景摄影视觉测量系统、工业摄影测量系统、3D光学图像测量系统等。
1 摄影测量系统的组成
摄影测量技术是由相机(经济型或工业型)、标准尺(用于校准系统初始精度)、标记点(用于被测量物体拍摄成照片后在软件中的拼接)、后处理软件(如:V-STARS、PLOYWORKS、RAPIDFORM,用于点云的处理和重构实物CAD模型与理论CAD模型比较)等部分组成。
2 摄影测量技术的原理和特点
2.1 技术原理
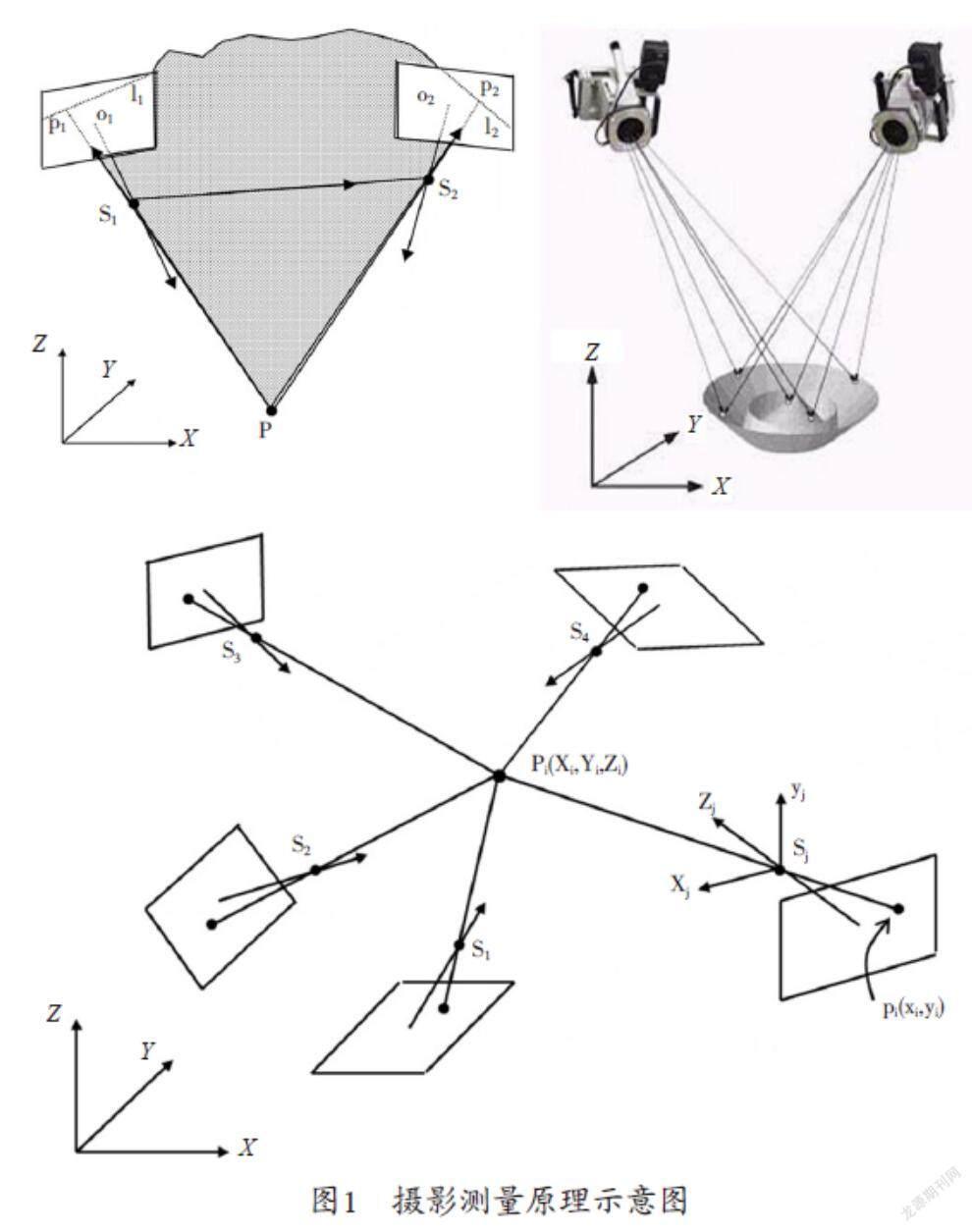
图1为摄影测量原理示意图,是照片经软件处理后获得的待测点三维坐标,图1中照片是运用美国GSI公司所生产的高精度INCA3专业相机拍摄所得,完成同一物体进行不同位置方向拍摄后,可运用后处理软件自动化处理INCA3相机照片,并经图像匹配处理及数学算法计算后得出待测点三维坐标。图片按照上述流程完成处理后,所得的三维数据将被上传至坐标系统内。在摄影测量技术应用之前,被测物体需提前贴好回光反射标志,或设置好探测棒点位,以保障摄影测量效果。
2.2 技术特点
对摄影测量技术特点进行总结,具体如下:①精度较高。在10 m范围内,单相机系统测量精度可达0.05 mm。②非接触测量。采用光学摄影的方式开展测量工作,无需直接接触工件即可完成测量作业。③测量时间短。单相机系统可在几分钟内完成测量工作,而双相机系统可实现实时测量。④受干扰小。摄影测量系统在不稳定条件下可正常测量,单相机系统受温度因素的干扰较小,而双相机系统则可无视不稳定条件完成精准摄影测量工作。⑤空间限制小。摄影测量系统受空间因素的限制较小,即使在0.5 m空间条件下仍可进行摄影测量。⑥数据获取率高。能够便捷化采集数据,可借助计算机软件完成像点的自动提取与量测。⑦适应性强。摄影测量系统可适应不同的被测物尺寸,在0.5 ~100 m可依靠同一套系统进行摄影测量。⑧便携性佳。单相机系统可由一人随身携带前往目的地进行测量。
3 摄影测量技术实施方案
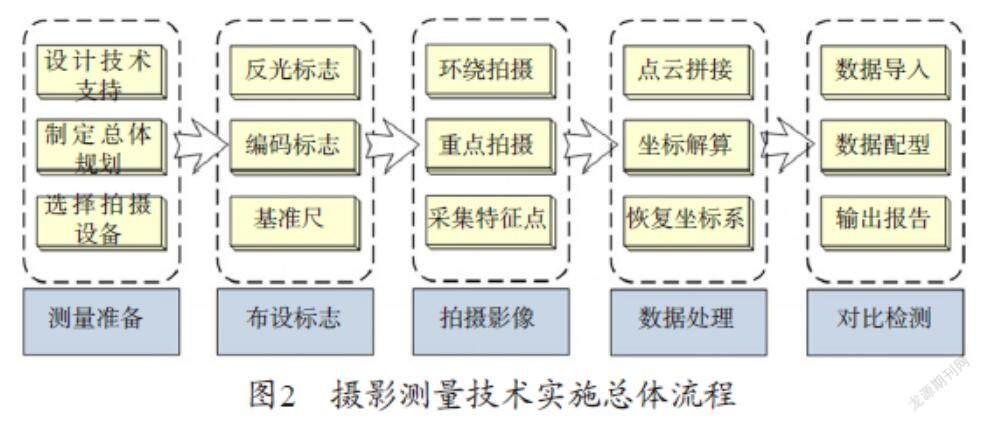
3.1 技术实施总体方案
整个摄影测量技术实施的总体流程如图2所示。
3.2 前期测量准备
飞机部件繁多,结构复杂,且工作环境干扰因素较多,在正式摄影测量之前应制定详细周密的测量计划,做好前期测量准备,使测量程序有序推进。通常情况下,测量计划包含以下内容:①对被拍摄部件内部结构进行分析,并划分拍摄带。②整理飞机部件摄影测量流程,按照难易程度将测量区域划分为难测量区、易测量区及特殊测量区,同时针对特殊测量区制定专项拍摄方案。③对摄影测量环境进行考察,选择适宜设备,进一步制定详细方案。
3.3 布设人工标志
在攝影测量期间需运用到圆形定向反光标志、编码标志两种人工标志。测量环境普遍存在一定杂光光源,且飞机部件表面光洁,缺乏纹理,色调差异小,在杂光光源干扰下容易产生摄影测量误差,因此在摄影测量前,应将圆形定向反光标志黏贴于被测部件表面,或作为激光投点器辅助设备进行拍摄。编码标志在摄影测量工作中用于完成照片拼接及自动化计算。
上述人工标志尺寸及黏贴位置应根据拍摄距离、飞机部件外形尺寸来决定,以此确保摄影测量可真实客观地反映出被测部件的空间形态及外形特征。
直接借助摄影测量系统所得的点云数据仅能够呈现测点间的位置关系,无法表现出部件尺寸数据,故在实际摄影测量期间,应人工设定基准尺。结合V-STARS系统来看,其基准尺长度多处于1 ~3 m,但由于飞机部件尺寸存在较大差异,对于垂平尾、机身、机翼等尺寸较大的特殊部位,应配备激光跟踪仪给定基准尺,避免出现图像拼接计算程序,规避测量误差的出现。在大尺寸飞机部件测量期间,将激光跟踪仪靶座(3~6个)设置在待测飞机部件周围,确保激光跟踪仪可完整覆盖整个部件,采集各靶座的相对空间坐标,得出靶标点间的尺寸,将其视为V-STARS系统标志点,同时采集激光跟踪仪靶标点,借助软件完成点云对接后,将尺寸数据输入其中,即可完成尺寸标定。
3.4 摄影测量环节
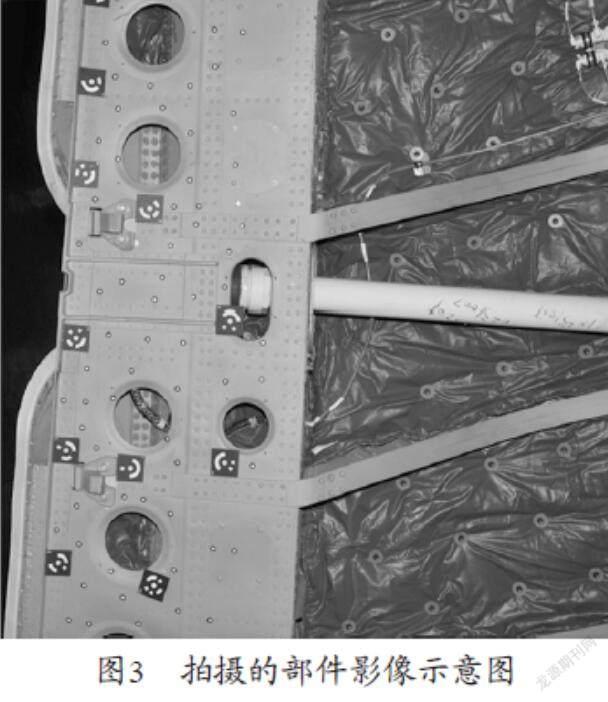
全方位考虑摄影距离、镜头视场角、测量场地、测量精度等多种因素确定摄影测量细节,飞机部件多应用“局部摄影”的方式进行摄影,并通过“整体解算”的方法,将编码标志视为图像公共连接点。飞机部件整体测量应做到均匀拍摄,为消除误差,可重复性拍摄重点部位及难点部位,以此逐步得出飞机部件全貌,飞机部件影像示意图如图3所示。
为便于进行点云数据的后置数据处理,需要进行飞机部件的设计坐标系恢复的工作。飞机具有自身坐标系,可结合标记描述飞机某些特征,因此在拍摄时必须采用特殊反光标记对这些特征点进行标记拍照,供后续坐标系转换使用。
3.5 处理测量数据
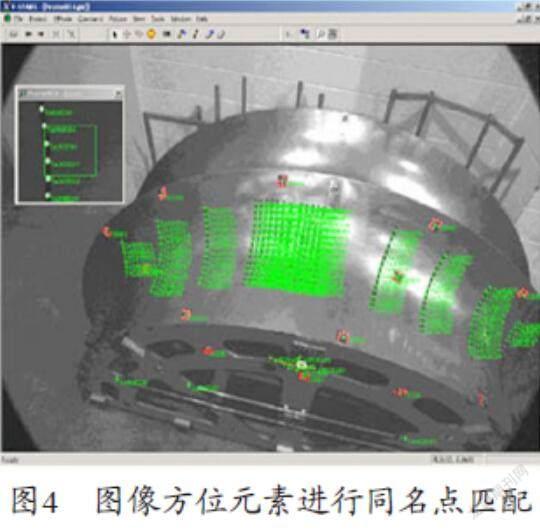
受到摄影距离及像机镜头视场角的局限,所拍摄的照片仅涵盖天线部分,此时应根据编码标志传递各测站间的位置关系。在数据处理期间,编码标志主要起到测量已知坐标控制点的作用,根据控制点获得空间信息,后应用后方交会原理获得图像外方位元素,继而完成图像的拼接,并良好传递测站坐标数据。运用V-STARS软件进行点云解算计算的步骤如下:①扫描摄影测量所得图像,识别编码标志;②匹配各图像中的编码标志,依据编码标志获得已知空间坐标,按照后方交会原理将图像整合至同一坐标系内,并得出图像外方位元素。③以外方位元素为基础,依托于核线匹配原理展开编码标志点同名匹配(图4)。④应用光束法计算标志点坐标,并获得被测飞机部件的外形点云。
V-STARS软件解算获得的点云数据既包含了飞机部件的真实外形、尺寸等信息,但同时也包含了测量过程中被测部件表面不规则反光点、形体阶差、空间噪点等冗余点,需要对其进行点云数据的后处理与优化。在Geomagic软件中打开原始点云数据,对比被测部件理论数模及拍摄的照片,删除原始点云中的冗余点,并对整体点云数据进行流型及优化处理。
4 结束语
数字化测量技术是实现飞机柔性、高精度装配的基础和核心,其地位和作用也将越来越显著。陕飞所开展的摄影测量技术的探索性研究工作,是将数字化测量系统引入飞机数字化装配系统中的一次大胆尝试,通过摄影测量技术的引入,一方面丰富了数字化装配的检测手段,另一方面通过摄像测量系统展开高精度拍摄测量及控制分析工作,以此提高飞机装配精度、提升公司飞机制造水平奠定坚实的基础。
参考文献
[1] 侯宏录,孙顺昌.高速摄影测量技术在飞机外挂物投放运动分析中的应用[J].高速摄影与光子学,1990(1):88-96.
猜你喜欢
课程教育研究·新教师教学(2016年1期)2017-04-10
环球人文地理·评论版(2017年1期)2017-04-09
中国新技术新产品(2017年3期)2017-03-07
科技资讯(2016年29期)2017-02-28
环球人文地理·评论版(2016年8期)2017-01-19
中国文化遗产(2016年5期)2016-12-14
湖南大学学报·自然科学版(2015年11期)2016-03-11
