
自平衡式新型智能轮椅的设计与实现
2022-05-24 07:51丁哲文王廷军*张嘉豪李浩罗宗仁戴辰伟刘世杰
科技风 2022年12期
丁哲文 王廷军* 张嘉豪 李 浩 罗宗仁 戴辰伟 刘世杰




摘要:在一般城市道路,輪椅使用者不免会遇到上下坡的情况,轮椅使用者易发生后仰或者向前翻的安全问题,为了实现轮椅使用者在上坡、下坡过程中保持身体水平,提高轮椅使用的安全性及舒适性,设计了一种基于大惯量轮的座位姿态自平衡轮椅。包括轮椅框架、座位、磁力锁、电机保护棘轮、大惯量轮座位姿态自平衡机构和两轮椅轮。根据其基本构造和基本原理,给出了能够实现自平衡式新型智能轮椅运作的方案和步骤,并通过实验证实了其实用性。本文主要对自平衡式新型智能轮椅的机械构造、控制原理和大惯量轮的原理进行分析研究和设计。分析了能够实现座位姿态自平衡的原理及要求,包括利用Arduino和角度传感器实现智能坡面控速和座位姿态检测和水平调节。
关键词:自平衡;大惯量轮;角度传感器;Arduino;磁力锁;棘轮
Design and Application of Intelligent wheelchair
Ding Zhewen Wang Tingjun* Zhang Jiahao Li Hao Luo Zongren Dai Chenwei Liu Shijie
School of Mechanical Engineering, Shanghai Dianji University Shanghai 201306
Abstract: In general urban roads, wheelchair users will inevitably encounter uphill and downhill situations, and wheelchair users are prone to the safety problem of leaning back or turning forward. In order to maintain the physical level of wheelchair users during uphill and downhill, and improve the safety and comfort of wheelchair use, a seat posture self balancing Wheelchair Based on large inertia wheel is designed. It includes wheelchair frame, seat, magnetic lock, motor protection ratchet, large inertia wheel, seat attitude self balancing mechanism and two wheel chair wheel. According to its basic structure and principle, the scheme and steps of realizing the operation of a new self balancing intelligent wheelchair are given, and its practicability is verified by experiments. This paper mainly analyzes, studies and designs the mechanical structure, control principle and the principle of large inertia wheel of the new self balancing intelligent wheelchair. The principle and requirements of seat attitude self balance are analyzed, including intelligent slope speed control, seat attitude detection and level adjustment by using Arduino and angle sensor.
Keywords: Self balance;Large inertia wheel;Angle sensor;Arduino;magnetic lock; ratchet
1概述
随着时代的发展,对于轮椅使用者的关注度愈发增高,安全带的方式大大降低了轮椅使用者的舒适度,类似的可调节姿态的轮椅也有着缺陷:(1)调节姿态时间过长,遇长、陡坡不能及时调整座位姿态;(2)仅使用控制装置调节需要短期经常维护。人口老龄化是当今世界发展的一个重要趋势,2012年年初全国老龄办发布的《中国人口老龄化发展趋势预测研究报告》显示,目前我国60岁以上的老年人口已达1.43 亿,“十二五”时期,我国将出现第一个老年人口增长高峰,60岁以上老年人将由 1.78 亿增加到 2.21 亿,并且预计到 2050 年,老年人口总量将超过4亿。随着人口老龄化程度的不断加深,庞大的老年群体也造就了潜在的巨大市场。据统计,2012 年将达到 1 万亿元,预计2020年达到2万亿元。人口老龄化进程将加快,急剧增长的社会养老需求与老龄事业发展的矛盾日益突出。据调查,我国轮椅行业未来几年产量将保持1.1倍以上的增速,产量2013-19年由312万台增至535万台,同年电动和手动类型存量分别为715万,1400万台。可以看出手动轮椅的存量远大于电动的,因此轮椅电动化已经有了一定的市场需求,
我国每年因为轮椅在坡道上失去平衡而发生的事故不在少数,对人身造成了极大的伤害,关于轮椅使用者的出门便利这一社会问题已愈发严重,因为空间的限制下,改造坡道不切实际,耗费大量人力物力。传统的轮椅需要轮椅使用者通过安全带的形式保证轮椅使用者在下坡时不发生下滑,这种形式存在一定的安全隐患,且降低了舒適性。因此,针对以上情况,需要研发一种能解决以上问题的的装置,使轮椅使用者一直处于平衡状态。本文利用了传感器技术、大惯量轮,提出了一种基于大惯量轮通过多种传感器协助完成自平衡的轮椅。
本项目设计的智能轮椅中关键技术可经过技术迭代,适配于已有的传统轮椅,达到本项目设计智能轮椅的核心功能,具有更为广阔且稳定的市场。
2工作原理与结构设计
本设计采用Ardunio开发板实现控制,大惯量轮传动模块实现轮椅座位部分的平衡。 整个系统的核心为借助加速度传感器与实现座位平衡以及利用自身前进动力的机械部分。
大惯量轮普遍用于帮助机构度过死点,用在此处,是利用了陀螺效应,工作原理类似于陀螺仪[1] ,重力对于高速旋转中的陀螺产生的对支撑点的力矩不会使其发生倾倒,轴的方向不会随外力的方向发生改变。
2.1传动机构
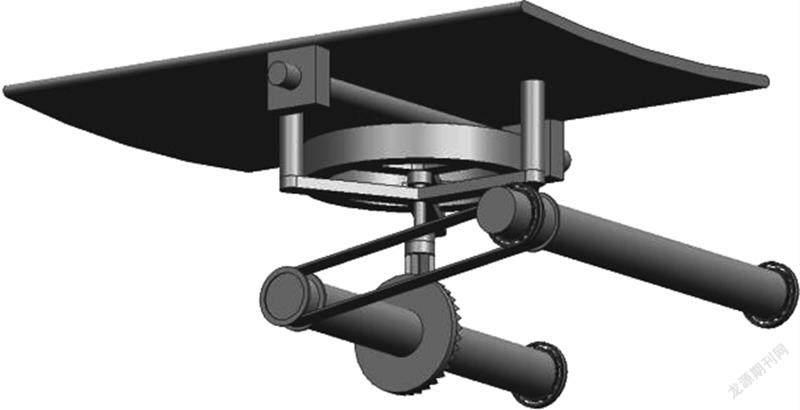
传动机构如图2所示,由两部分组成,其中上半部分为大惯量轮部分(以下简称A)、下半部分为传动机构(以下简称B)。A利用陀螺仪原理使座位维持水平状态,B将轮椅轮子转动的动力经过传动轴Ⅰ-链条-传动轴Ⅱ-伞齿轮-锥齿轮-棘轮-大惯量轮。
结构简单、稳定、安全性高、成本低、节约能源,可不完全依靠电池提供的能源带动电机。与惯量轮部分设置棘轮,单向传递动力。
在此机械结构的基础上,可使用电机给大惯量轮提供动力,短时间内即可达到自平衡的效果。
两传动轴分为主动轴和从动棒轴,两轴装配手时应保持平行,其中,主动轴一端通过轴承固定轴向方向,另一端与车轮轴连接,从动轴两端都通过轴承固定轴向方向,两轴通过轴上的链轮、链条传递动力,从动轴中间部分装有伞齿轮,伞齿轮与大惯量装置底部的锥齿轮连接,在锥齿轮与大惯量轮中间设置的棘轮可以防止大惯量轮反向带动车轮。选用周围质量大,中间薄的镂空圆盘座位惯量轮主体,高速转动带来的巨大离心力会有脱离的可能,惯量轮的轴应当使用可靠的固定方式与转动轴固定。惯量轮的圆柱度应当在0.02mm上下,才能保证稳定的转动。
座椅底部固定的支撑杆可以使座椅绕杆在轮椅前进方向自由旋转。且设置了前后两根限位杆,限制了座椅的最大转动角度,空间上不会与大惯量轮的转动发生干涉。限位杆的设计可结合使用者当地道路坡度。
2.2传感器设置
采用三轴加速度传感器(通过三轴坐标判断各轴加速度)来获取轮椅当前姿态。当轮椅处于水平路面时,由三轴加速度传感器控制的磁力锁使座位无法转动,因为在水平路面座位无需转动;当轮椅的角度发生改变时,传感器检测到未处于水平状态,磁力锁不工作,座椅可自由转动,大惯量轮使座椅维持在水平状态。手机可直接通过蓝牙连接传感器查看加速度、角度数据;可设置传感器“加记标准”(将加速度和角度值归零)和“平滑系数”(控制数据输出数据的滤波1~1000,值越大滤波越大)。
除了三轴加速度传感器以外,可在座位上安装压力传感器,检测轮椅上是否有人以启动自平衡模块。完善流程。GPS定位系统可及时获悉轮椅使用者位置。
3控制系统设计
整体系统基于Ardunio开发板,有着十四个数字输入/输出引脚(其中六个可用作PWM输出),只需用数据线将其连接到计算机即可写入程序或者使用电池即可为其供电并开始使用。
当飞轮转速过低时可使用电机带动飞轮,此处使用了BTN单/双路电机驱动模块增加隔离芯片74LS244,提高信号驱动能力,同时隔离BTN 芯片和单片机,保护BTN和单片机芯片;增加 LM2596_5.0电源芯片,为隔离芯片 74LS244 提供电源,也可为外部提供5V 输出。
线路可布置在轮椅机构空心部分内,避免线路裸露的安全隐患及达到一定的防水防尘级别。
结语
基于大惯量轮的座位姿态自平衡轮椅具有良好的应用前景。使用Ardunio开发板串联了多种传感器以及对电机的控制,机械式传动结构和也能在无外界电源情况下完成轮椅座位的自平衡。在机械结构传动的机构上增添了多种模块,能更好的完善自平衡这一功能。
参考文献:
[1]国家统计局官网.
[2]刘延柱. “鱼鹰”飞机的陀螺效应[J]. 力学与实践,2012,34(4):102-103.
项目:本项目获得2021年“上海市大学生创新创业训练计划项目”资助
*通讯作者:王廷军(1966— ),男,博士,教授,研究方向为机器人技术。
