
用于原子重力仪的扫频频率源系统
2022-05-25 07:27摆海龙白金海胡栋王宇
计测技术 2022年2期
摆海龙,白金海,胡栋,王宇
(航空工业北京长城计量测试技术研究所 计量与校准技术重点实验室,北京 100095)
0 引言
重力加速度是地球重力场的关键参数,随时间及空间而变化。精确的重力加速度g值可用于资源勘探、精密计量和基础科学研究等[13]。1992年,斯坦福S.Chu小组首先使用冷原子干涉技术实现对重力的精确测量后,国内外大量的学者投身于冷原子重力测量领域,原子重力仪被广泛应用于重力场的测量、精密物理实验和基本单位溯源等[4]。测量时,原子需要经过冷却、上抛、干涉和探测四个过程,最终才能获得重力加速度g。精确的激光频率控制是实现原子干涉的关键技术之一,在原子喷泉控制实验中通过声光调制器(AOM)实现对激光频率的控制,具体为改变冷却光AOM 双通(Double-pass)中光路中的AOM 频率和功率实现对冷却光频率和功率的控制[5]。在重力测量的干涉阶段,需要扫频频率源来补偿主从Raman光多普勒频差。
在原子干涉重力实验系统中,扫频频率源是实验必需品之一。要实现重力加速度的全球任意区域测量,原子重力仪就需要从实验室走向车载、机载或者舰载。室外测量的前提是实现原子重力仪的小型化,这就要求在整机系统性能不变的情况下,尽可能减小实验系统的重量和体积[6-7],包括实现光路系统、电路系统和真空系统的小型化。其中,小型化扫频频率源的设计就是电路系统设计的重要组成部分。实验室常用的扫频信号源是商用信号源,存在体积大、功耗高、无法与实验系统集成化设计的缺点。重力实验系统对频率源的需求存在数量多、集成化高的特点,商用仪器无法满足。因此,国内外各个实验室都在设计应用于自己实验系统的频率源。
传统的扫频方式通过改变振荡器的振荡频率来获得扫频信号。LC 振荡电路中,通过改变电路中电感和电容参数来完成扫频。磁调制扫频振荡器利用外加磁场强度的变化改变磁铁材料导磁率来实现扫频,其实质是通过改变电感的方式实现扫频。也可以通过改变外加电压的方式利用变容二极管实现扫频功能。该实现方法简单,但频率稳定性差,加之该方法是模拟电压控制,频率准确性较差、调节灵活性差、频率源通用性差[8-10]。而本文采用数字式频率合成器(DDS),可通过外置微控制器访问寄存器实现扫频频率源,具有准确度高、稳定性好的特点。
1 原子干涉实验对频率源的需求
在原子重力实验中,通过磁光阱(MOT)囚禁87Rb原子,之后将这些原子竖直方向上抛,经过偏振梯度冷却(moving molasses)后,频率源驱动两个工作在double pass 状态的AOM 控制三个向上和三个向下的囚禁光束。两个频率源的频率差决定冷原子喷泉的速度,在MOT 装载原子阶段,两个AOM 由频率源1 控制,原子装载完成后,频率源2 控制AOM2 设置上下两束激光的频率差,使得由下向上的激光频率接近87Rb 原子D2 谱线谐振频率,此时原子被加速上抛。在之后的1 ms 时间内,使用扫频频率源控制AOM,使得激光频率下移20 MHz,该方法在偏振梯度冷却阶段产生一个大失谐,使得原子进一步冷却[11]。原子喷泉控制电路如图1所示。
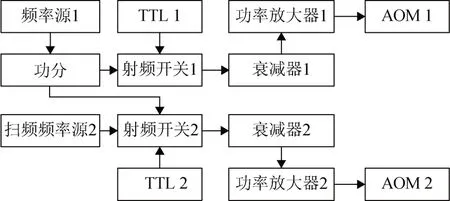
图1 原子喷泉控制电路Fig.1 Atomic fountain control circuit
在重力测量的干涉阶段,Raman光脉冲对原子团进行操作形成干涉条纹。Raman 光的实现方法是:通过光学锁相环将主从激光器相位锁定,只有主从Raman 光拍频后与6.8 GHz 微波信号源(S1)混频[12],混频后的50 MHz 信号(S2)作为数字鉴频鉴相器的参考输入,扫频频率源配置为单点频率模式,可实现数字鉴频鉴相器50 MHz 本振参考,数字鉴频鉴相器的输出通过PID 控制反馈到从激光器。扫频频率源通过改变主从Raman 光之间的频差来补偿原子在下落过程中产生的多普勒频移[13]。模拟鉴相器输出的信号经过反馈滤波模块后作为快速反馈输入到激光器电流交流调制端口。反馈滤波模块由低通滤波器、RC 并联电路和可调衰减器等组成。实验装置示意图如图2 所示。获得原子的干涉条纹后,当地的重力加速度为g=α keff,其中,α为扫频频率源的斜率,keff为Raman光有效波矢。扫频频率源的噪声将直接贡献于当地重力测量值g中。

图2 实验装置示意图Fig.2 Schematic diagram of experimental apparatus
2 扫频频率源方案设计
2.1 扫频原理
传统扫频频率源采用软件模拟扫频方式,将芯片配置为单点频率输出模式,再通过循环增加或者减少单点频率输出值,实现模拟扫频方式[14]。AD9959 则是通过硬件频率累加器计数的方式进行扫频[15],具有频率稳定度高、扫频线性度高、功耗低(百毫瓦级) 的优点。频率累加器使得AD9959 输出频率从一个可编程低频(S0)梯变为可编程高频(E0),或者高频变为低频,扫频原理示意图如图3 所示。将AD9959 设定为线性扫描模式,设定扫频起始频率S0 和扫频结束频率E0。扫频斜率参数由4个控制字设置,向上扫频步进控制字RDW、向上扫频驻留时间控制字RSRR、向下扫频步进控制字FDW 和向上扫频驻留时间控制字FSRR。

图3 扫频原理示意图Fig.3 Schematic diagram of the principle of frequencysweeping
扫频步进频率计算方法为

式中:N为RDW 或者FDW 设定的数值;系统时钟fsysclk为500 MHz。
扫频驻留时间计算方法为

式中:M为RSRR 或者FSRR 设定的数值;同步时钟fsynclk为125 MHz。
扫频模式分为驻留位扫频和无驻留位扫频,区别在于扫频终点的频率是否保持。驻留位扫频模式下,频率扫描的方向和开始均由PS0 引脚控制,当PS0 引脚检测到上升沿信号,RSRR 寄存器值被加载到斜坡速率定时器中,频率累加器向上计数,实现由低向高扫频。当PS0引脚检测到下降沿信号,FSRR 寄存器值被加载到斜坡率定时器中,频率累加器向下计数,实现由高向低扫频;无驻留位扫频模式下,扫频方向只能由低到高,扫频的开始仍由PS0 引脚控制,当PS0 引脚检测到上升沿信号时,无论器件处于什么状态,都会完成新的扫频过程。
2.2 硬件设计
本文设计的用于原子喷泉控制实验的扫频频率源主要由STC 增强型15 系列单片机STC15F2K60 S2,AD9959 芯片和线性稳压源构成,整体结构图如图4 所示。15 系列单片机程序下载方式为ISP/IAP,无需编程器和仿真器,结构简单。AD9959芯片的控制通过SPI 协议,该单片机可实现SPI 协议数据传输,可完成频率设定和控制参数的传输。供电采用DC 5 V 外供电,经过超低噪声线性稳压芯片LP5912-3.3 V 输出3.3 V 电源,供单片机使用。3.3VDC 电源通过低压差稳压芯片LD1117S输出1.8 V电源供AD9959使用。
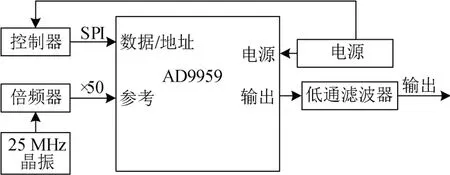
图4 整体设计结构框图Fig.4 Block diagram of the overall design structure
2.3 软件设计
本设计的程序完全采用C语言编写,开发环境为Keil uVision5,控制MCU 为STC15 系列单片机(具有片内容量大、机器周期小的特点)。AD9959扫频频率源的初始化配置以及扫频频率控制字均通过SPI 实现对寄存器的写入,具体配置是:通过单片机的IO引脚按照严格SPI时序写入完成寄存器配置,扫频选用无驻留模式。编写好的程序通过CH340芯片USB转TTL由电脑写入单片机,引出扫频开始触发信号PS0,通过NI 数据采集卡给外部TTL实现信号触发,触发时刻由原子重力仪时序控制系统决定。在实验中,扫频斜率为25 MHz,由频率控制字RDW,RSRR,Δf,Δt进行设定。软件流程图如图5所示。
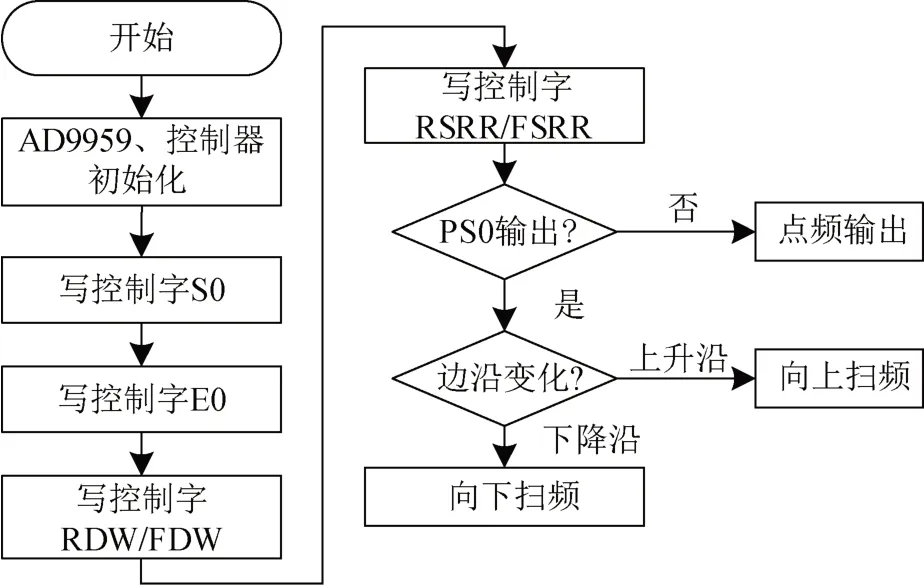
图5 整体设计结构框图Fig.5 Block diagram of the overall design structure
3 实验测试
扫频频率源的相位噪声和频率稳定度会通过锁相环电路进行传递,使得拉曼光本底相位噪声和频率稳定度变差,最终通过重力测量的干涉条纹表现出来。为了更好地分析扫频频率源的质量,用Key⁃sight N9000A 信号分析仪对频率源相位噪声进行分析,具体方案:设定AD9959点频输出为100 MHz,设置载波为100 MHz进行相噪分析,分析结果如图6(a)所示,1 Hz 处相位噪声为-50 dB,1 kHz 处相位噪声为-112 dB,可看出该频率源噪声小、频谱纯净度高。频率稳定度的测量方法为:通过频率计数器Keysight 53220A 对AD9959 单点100 MHz 频率连续输出采样,采样时间为3 h,然后计算测试数据阿伦方差,结果如图6(b)所示,1 s的频率稳定度为1.38×10-11,128 s频率稳定度为8.5×10-12。

图6 扫频频率源性能测试图Fig.6 Swept frequency source performance test plot
扫频频率源能够用于原子重力仪喷泉控制实验系统的前提是扫频频率源对原子重力仪的实验相位噪声的贡献小于原子重力仪自身分辨力[16]。冷原子重力测量领域,频率源相位噪声对重力仪精度的影响由频率源相位噪声传递函数Hφ(ω) 决定[17],表达式为
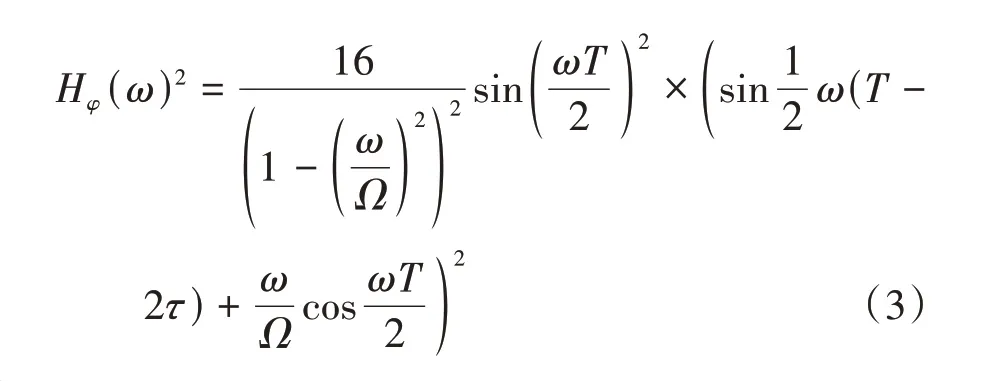
式中:ω为信号源频率,rad/s;Ω为拉比震荡频率,rad/s;τ为π/2 脉冲作用时间,s;T为自由演化时间,s。
频率源相位噪声对原子重力仪灵敏度影响σϕ为

式中:Sφ(ω)为AD9959频率源相位噪声测试数据。
取自由演化时间T=100 ms,π/2 脉冲持续时间τ=30 μs,扫频频率源对原子重力仪相位噪声贡献为2.81×10-9g/shot,完成一次测量(single shot)的时间为900 ms,600 s 积分时间对实验系统的灵敏度影响为1.15×10-10g。扫频频率源在100 MHz频率稳定度3 h 为10-10量级,计算其对重力测量实验系统中384 THz 激光器稳定度影响,得到扫频频率源的频率稳定度对原子重力仪的影响为2.6×10-15g/3 h。测试结果表明,该信号源可用于分辨力为10-10g量级的原子重力仪实验系统。
4 结论
本文设计的扫频频率源可以用于原子重力仪喷泉控制系统,实现原子冷却阶段的啁啾扫频和光学锁相环系统鉴频鉴相本振参考。输出信号的相位噪声可满足10-10g原子重力仪实验系统的使用要求,高于目前行业重力仪实验室最高分辨力10-9g,使用前景广阔,同样可用于冷原子梯度仪、冷原子陀螺仪实验等。功耗仅5 W左右,可代替实验系统的大功率商用频率源,如KeySight 33600A 等,满足实验室从原理样机向可搬运实验测试仪器发展的要求,进一步减小了原子重力仪实验系统的体积和重量,推动了测试仪器向车载、机载、舰载的发展进程。
猜你喜欢
小哥白尼(神奇星球)(2022年5期)2022-08-15
宇航计测技术(2021年3期)2021-08-17
中华养生保健(2020年10期)2021-01-18
探索科学(学术版)(2020年2期)2021-01-16
航天器环境工程(2020年3期)2020-11-04
科普童话·神秘大侦探(2020年3期)2020-05-11
电子制作(2017年8期)2017-06-05
移动通信(2016年22期)2017-03-07
小天使·一年级语数英综合(2016年9期)2016-05-14
电子产品世界(2016年1期)2016-03-07
