
“龙鹰”自适应布局无人机的概念设计
2022-05-30 22:33王晓璐陈昌宁张项博
无人机 2022年7期
王晓璐 陈昌宁 张项博
无人机拥有效费比高、响应快、人员零伤亡等特点,适合执行边防任务。采用大展弦比布局设计的大型固定翼无人机,其升阻比高、续航时间长、任务载荷重量大,但对起降环境要求较高,一旦边境地区没有跑道,大型固定翼无人机无法起降。多旋翼无人机部署更为灵活,但部分型号存在飞行速度慢、续航时间短等问题,在边境地区执行任务难以取得预期的效果。无人机执行边防任务须具有如下能力。
第一,短距起降或垂直起降能力。
第二,对于持久侦察与快速打击任务,无人机的续航时间应足够长,部署灵活,飞行速度快,以适应不同任务的需求。
第三,无人机具有一定的隐身性和机动性,以提高战场生存力。
总体来看,常规单一气动布局难以同时满足多种设计需求。因此,本文提出“龙鹰”自适应布局无人机。
布局设计与技术参数
“龙鹰”无人机采用自适应布局设计,在飞行时,机翼可在前掠和后掠形态间切换。尾翼采用独特的可变倾角翼面设计,其外倾角可在0~40°之间自主改变。在前掠翼布局下,尾翼外倾角为40°,可提高前掠翼布局下的操纵性;在飞翼布局下,尾翼外倾角从40°变为0°,可减小巡航时的飞行阻力。
通过主机翼的转动与垂直尾翼的翻折,无人机实现了前掠翼布局与飞翼布局之间的切换,从而在不同飞行任务阶段凸显前掠翼与飞翼布局的气动优势。单一气动布局存在高升力起降与高效率巡航之间的矛盾,无人机切换气动布局,可获得较好的宽速域飞行性能,不仅解决了这一矛盾,而且提升了低速飞行时的偏航稳定性和高速飞行时的隐身性能,提高了无人机的军事应用价值。
无人机的2种布局图和概念图详见图1,飞行剖面示意图详见图2。该机设计巡航速度Ma 0.3,机长4m,机高1m,飞翼布局时翼展2.9m,前掠翼布局时翼展4.2m。
自适应布局设计
“龙鹰”无人機的升力面由变后掠主机翼与变倾角尾翼两部分组成。当主机翼前掠角为10°且尾翼上倾40°时,无人机为前掠翼布局形态,此时无人机拥有较好的机动性与侧滑稳定性,适合大迎角机动飞行。当主机翼后掠角为57°时,主机翼与水平尾翼组合,形成飞翼布局,无人机的飞行阻力降低。与前掠翼布局无人机相比,飞翼布局无人机的雷达截面积更小,提升了无人机的战场生存力。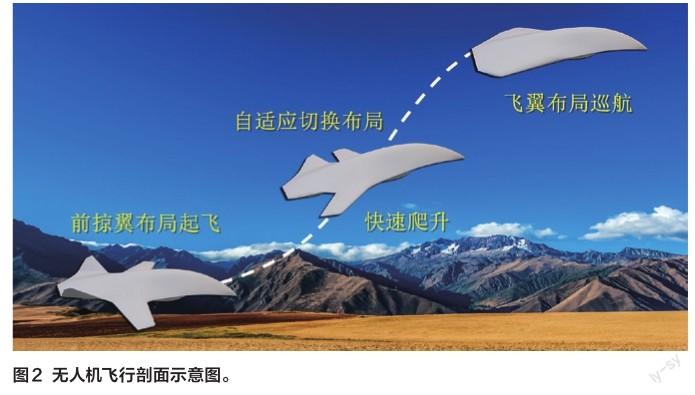
本文使用ANSYS FLUENT软件,对“龙鹰”无人机的两种布局进行CFD数值计算。计算设置了四组工况,详见表1。本文计算时取飞行时的侧滑角为0,则无人机绕流流场为对称分布,可使用半模非结构网格计算,半模计算域网格数不小于700万。湍流模型选用K-omega SST,使用二阶迎风差分格式离散控制方程。由于飞行速度≤Ma 0.3,属于低速不可压范围,使用Coupled算法进行数值计算。
计算结果(见图3)显示,前掠翼布局时的升力线斜率和升力随迎角单调变化的范围均大于飞翼布局。飞行速度为Ma 0.1时,前掠翼布局12°迎角下,升力系数较飞翼布局提升约36%;飞行速度为Ma 0.3时,飞翼布局4°迎角下阻力系数较前掠翼布局降低13%。总的来看,自适应布局可兼顾起降和巡航阶段对气动力的不同要求,综合气动性能优于单一布局。
大后掠边条翼设计
“龙鹰”无人机使用大后掠边条翼,边条翼的后掠角为74°。在大迎角飞行时,边条翼的脱体涡可对两种布局的机翼绕流流场产生有利作用。数值计算结果表明,在前掠翼布局下,边条翼对机翼的干扰强度明显大于飞翼布局。
后续改进方向
“龙鹰”无人机的后续设计将围绕两方面进行改进。
翼型设计
翼型设计须要考虑两种布局的不同需求。由于本方案中使用机翼旋转方案实现布局变换,导致两种布局下机翼的前后缘位置颠倒,这对翼型气动、翼肋结构和机翼作动装置等设计提出了较高要求。
控制系统设计
不同布局转换时,无人机的空气动力焦点和重心应在合理的范围内变动。根据气动数据和结构约束,控制系统的优化设计是无人机从概念设计走向工程应用的必要条件。 ■
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
湖北工业职业技术学院学报(2021年1期)2021-04-01
名车志(2020年10期)2020-10-27
民用飞机设计与研究(2020年1期)2020-05-21
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
产品可靠性报告(2017年6期)2017-09-05
西北工业大学学报(2015年4期)2016-01-19
海军航空大学学报(2015年3期)2015-11-11
科技传播(2014年4期)2014-12-02
