
森防垂起无人机飞行过程中主动安全性技术研究
2022-05-30 10:48王培毅伍刚邢志斌
消防界 2022年14期
王培毅 伍刚 邢志斌

摘要:基于森防任务区域地势复杂、幅员辽阔等因素以及无人机飞行事故特点,文章提出通过自动避障、路径规划、ADS-B系统、仿地飞行等主动安全性设计,为后续森防无人机飞行过程中安全管理框架的构建奠定基础。
关键词:森防无人机;ADS-B;避障雷达;双目下视;仿地飞行
一、垂起无人机森防的场景应用
我国民用无人机产业在2016年产值已达到150亿元,近年来行业产值更是迅猛发展,其在抢险救灾、环境监测、航拍测绘、物流运输、农林植保、个人消费等诸多领域得到了广泛应用。作为新近崛起的潜力装备,无人机以其强大的功能和独特的应用价值收获了应急、森防、消防部门的高度青睐,2021年应急管理部科技和信息化司发布《应急管理综合行政执法装备配备标准(试行)》,在应急森防等综合管理配备表中,亦将无人机列入。
垂起无人机具备建造和使用成本低、地勤保障要求低、人员安全风险小等特点,同时其技术的不断创新,其品质、性能的不断提升,以及价格的趋于合理,使得垂起无人机在森防领域的应用变得愈来愈多,当前我国各地森防部门以此来加强日常巡查、火场侦查、空中通信、辅助救援等业务已成为常态。
无人机可搭载可见光视频图像和热成像视频图像吊舱荷载,配合AI林火识别算法,一方面,对重点防火区域每天进行常规巡查覆盖,充分响应“打早、打了”的防火目标,对于森林中的地下火或者茂密枝叶掩盖下的林火进行巡查预警,还可重点对人员进山、野外用火等情况进行巡查。另一方面,无人机能对火情态势从空中进行持续观察,使灭火指挥部门能够迅速有效地组织力量部署,提高灭火作战效率,减少救火人员的伤亡。
二、主动安全性技术概述
(一)安全性技术研究的必要性
随着无人机产业在各行业场景迅速发展,无人机事故发生造成的大量经济损失,严重威胁着公共安全和国家安全,引起了社会的广泛关注。从2006年无人机行业迅猛发展,无人机使用量激增,无人机的飞行事故总量逐渐上升,其后随着平台、飞控、航电、材料、工艺、结构件等技术发展,使无人机事故率保持稳定而略呈下降的总趋势。
无人机安全性能的提高,依赖于无人机系统各分项技术进步与整体管理水平的综合提高,是基于安全性完成分析、设计、验证等全过程管理技术相结合的结果。无人机的飞行事故除了受任务系统、任务规划与地面控制站、特定的起降设备和数据链路等多种自身飞行系统因素的影响,还会受到使用环境条件、执行任务等的影响。事故的主导因素常常并非单一因素,而是多种因素关联影响造成。
一般而言,无人机事故中最常见的原因之一便是駕驶员操作失误,根据数据统计人为操作因素约占到无人机事故总量的31%。具体到不同型号无人机则可能有差异,如美国RQ-7、RQ-5,人为因素的事故率分别占21%和47%。因此,在设计过程中针对确定的人为因素进行安全性设计,可以很大程度减少人为因素导致的事故。
(二)主动安全技术的范围
无人机整体的安全性包括结构安全性设计、电气安全性设计、原材料与元器件选用安全性管理、应急处理措施以及使用管理安全性控制等要求。其安全性设计与系统研制同步开展,同步设计,同步验证,一般包括:
1.无人机系统安全性设计应与产品功能、性能、预期使用环境等要素进行综合权衡,通过安全性分析,确定安全性设计方案,并进行相关设计验证;
2.无人机系统应设计相关的设备、程序或人机界面以应对可能出现的紧急情况;
3.应进行区域安全性分析或检查,对邻近系统、设备或部件的故障影响采取相应措施;
4.应对影响无人机系统安全的部位进行标识;
5.应按使用要求配置必要的检测和声光警告装置;
6.与安全有关的事项,应在使用维护相关技术资料中作出明显标识。
本研究则是在无人机系统中已集成搭载IMU、GPS、地磁等传感器成熟性技术方案的基础上,侧重通过加装自动避障、感知飞行器及三维仿地飞行等主动安全性设计,从感知障碍、绕过障碍、主动航线规避等多维度实现在垂起无人机飞行过程中的安全保障。
三、主动安全技术实现路线
(一)系统整体架构
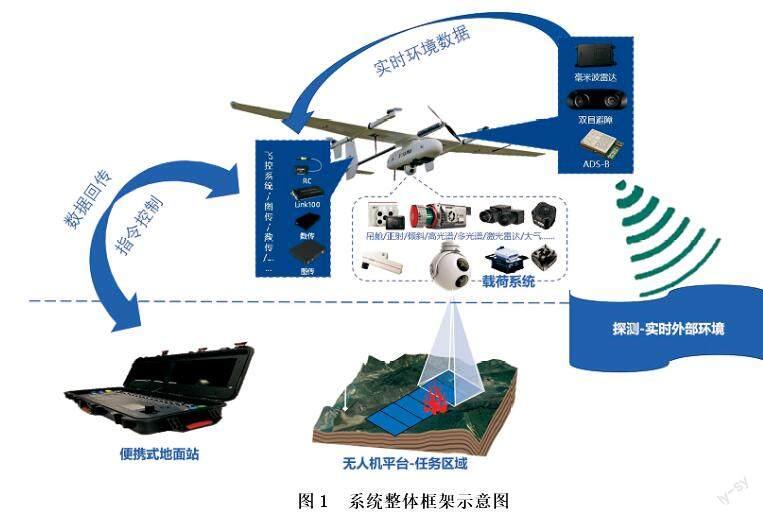
在包含图传天线、数传天线、飞行控制系统、地面站系统、载荷、无线通信链路等通用组成部分外,本文设计的主动安全技术系统结构示意图如图1所示。
基于自动避障、仿地飞行等主动安全技术的无人机系统主要涉及机载分系统、飞行控制系统(简称飞控)、地面站控制系统、无线通信链路,其各部分的任务和联系如下:
机载分系统主要包括在飞行平台中搭载双目视觉系统、毫米波避障雷达系统、ADS-B系统,完成自动避障过程中障碍物感知的任务,通过感知外部飞行器、前方及下方障碍物等实时环境数据,并将数据提交飞控系统或通过无线通信链路进行数据回传。
地面站控制系统负责对采集到的图像信息进行分析,在发现威胁之后,及时发送指令给飞控系统;飞控系统收到指令之后,通过控制无人机的速度、航向等完成障碍规避。
无线通信链路则负责实现各子系统之间有关控制指令、回传数据的无线通信传输,对其他几个部分起到了通信桥梁的作用。
(二)机载分系统
1.分系统概述
机载分系统中搭载的视觉系统位于飞行器任务舱底部,由一组双目摄像机组成;毫米波雷达系统位于任务舱底部和前部,由毫米波测距传感器组成;搭载ADS-B系统可实时感知160公里范围内的飞行器,实现威胁预警。飞行器迫降时,视觉系统通过计算机视觉算法感知飞行器下方环境,实时检测障碍物的距离和轮廓,规避障碍物并自主选择良好的降落点。毫米波雷达系统通过测距感知飞行器前、下方障碍物,并实时自动规避。
2.毫米波雷达系统
毫米波雷达系统基于面向人机安全交互的智能避障技术。飞行平台外壳内部的前方及下方内侧分别安装有毫米波雷达传感器,承载外壳内部位于雷达传感器之间安装有控制模块。毫米波雷达是利用电磁波探测目标的电子设备,通过发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、方位、角度等信息。在起飞、飞行、降落各阶段实时感知障碍物,如检测到障碍物,无人机可立即改变飞行路径,保障飞行安全。
毫米波雷达避障系统通过毫米波雷达感知障碍物距离,然后通过避障模块进行判断,当满足设定条件时进行避障控制。避障模式分为前向避障和下向避障。其测距范围为0.5~240m;其波束宽度:方位面28°,俯仰面18°,因前视避障和后视避障安装方位差异,如图2所示:
3.双目视觉系统
双目视觉系统采用两个相同型号的CCD摄像头组合而成,搭载于无人机平台下方。通过双目摄像头视觉系统进行障碍物识别,对飞行过程中下方的障碍物进行检测,获取外部环境图像信息。双目相机采用全时期检测障碍物模式,其实际视场角:左右60°,前后40°;实际探测距离为50m。
当发现障碍物时,通过双目摄像机各获得一张障碍物的图像,利用视差原理、产生的立体视觉信息和视觉算法,以此获得障碍物的三维空间坐标计算值,进而可获得该障碍物的深度值,基于所获取到的深度值得到无人机与障碍物之间的距离。
若无人机降落时,当离地50m时开始自动进行降落點智能筛选、地形智能感知,当探测到屋顶、悬崖等降落地时实时规避,确保飞行器安全降落。
4.ADS-B系统
ADS-B系统是集通信与监视于一体的信息系统,是广播式自动相关监视系统(Automatic Dependent Surveillance-Broadcast)的简称,由信息源、信息传输通道和信息处理与显示三部分组成。它把冲突探测、冲突避免、冲突解决、ATC(空中交通管制,Air Traffic Control)监视和ATC一致性监视以及机舱综合信息显示有机地结合起来。配备有ADS-B的垂起无人机在飞行过程中,发现160公里范围内威胁预警,同时飞机通过调整高度或飞行方向的方式,实现自动规避,确保飞行安全。
机载电子设备包括GPS接收机、数据链收发机及其天线、驾驶舱冲突信息显示器CDTI,装配后不需要任何地面辅助设备即可完成相关功能。
(三)飞行控制系统
无人机飞控是无人机的大脑,是指能够稳定无人机飞行姿态,并能控制无人机自主或半自主飞行的控制系统。垂起无人机的飞行控制主要包括方向、副翼、升降、油门、襟翼等控制舵面,通过舵机改变飞机的翼面,产生相应的扭矩,控制飞机转弯、爬升、俯冲、横滚等动作。
各机载分系统模块间通过ROS消息(TCP)的通信模式,与飞控采用SPI通信方式(Serial Peripheral Interface,串行外设接口)。飞控与地面站系统主要交付是一方面接收地面站的用户指令,另一方面向地面站回传航测或视觉数据。其与机载分系统交付主要是为机载分系统提供GPS信息、离线高层、飞行状态、各分系统开关指令、雷达测距指令等,同时接收各分系统的相机/系统状态、测距数据、视觉数据等,供飞控系统内部判断和控制无人机航线及飞行姿态。
(四)地面站控制系统
地面站控制系统是通过无线链路与机载设备(指飞控设备)双向通信,接收复合遥测数据并通过网络传输给控制终端,接收控制终端的指令和数据并通过无线链路传输给机载设备等;控制终端的作用是从基站接收、处理和显示遥测数据(实现飞行状态监控以及视频图像显示等),进行飞行任务规划等。
基于高精度数字三维地图的地形环境设计航线,在飞行线路上自动感知获取障碍物坐标信息,可实现低成本、常态化的森防火情巡查、应急勘测、故障线路影像获取等执飞任务,具有快速进行航线规划、一键匹配航线高度,生成仿地飞行航线、多种线路坐标格式导入导出等功能。借助此功能,垂起无人机能够适应更多的地形,利用快速全局路径搜索、路径规划和碰撞检测算法,根据测区自动生成变高航线,实现点对点智能地形匹配飞行,保持地面分辨率一致,从而获得更好的数据效果及飞行安全控制。
四、结语
通过视觉系统、毫米波雷达系统及ADS-B系统技术进行优势互补,无人机可具备全天候、全地形的全场景环境感知能力,继而为危险地形、障碍物的及时规避提供了足够的时间,从而提高了飞行过程中的安全系数,共同保证垂起无人机在森防飞行过程中的执飞与降落安全。
参考文献:
[1]李波,翟书颖,李茹,等.一种采用ADS-B技术的通用航空防撞系统[J].电讯技术,2019,59(01):19-26.
[2]刘天奇.无人机视觉稳定避障系统的设计与实现[D].北京:北京工业大学,2015.
[3]孙柯.基于毫米波的植保无人机避障技术研究[D].杭州:杭州电子科技大学,2019.
[4]张宏宏,甘旭升,毛亿,等.无人机避障算法综述[J].航空兵器,2021,28(05):53-63.
[5]魏爱萍,赵福龙,无人机在森林防火领域的应用及未来发展[J].农业技术与装备,2021(10):115-116.
[6]连婷婷,崔利杰.无人机系统的安全性与危险源分析[J].航空工程进展,2020,11(04):517-523.
