混合交通流中自动驾驶车辆比例对交通效率的影响
2022-05-31 23:09张林青刘鑫宇崔飞谭晰文
河南科技 2022年9期
张林青 刘鑫宇 崔飞 谭晰文



摘 要:在自动驾驶汽车实际行驶过程中,不可避免地会与手动驾驶汽车共同行驶,从而形成混合交通流。为了探究不同交通任务下自动驾驶汽车比例对混合交通流交通效率的影响,本研究在遵循右行左超车规则、两秒法则及交叉路口停车线理论的前提下,基于元胞自动机混合交通流模型,构建了单向三车道、城市双向T字形交叉口混合交通流模型,借助软件进行模拟分析。模拟试验结果表明,在简单路况下,交通效率与自动驾驶汽车的比例成正比,并且在安全车流密度范围内,影响程度与车流密度呈正相关;在复杂路况下,车流密度较小时,较大的自动驾驶汽车比例才能明显优化交通效率;车流密度较大时,自动驾驶汽车比例的增加反而会使交通效率劣化。因此,自动驾驶汽车的驾驶模式有待于进一步优化。
关键词:自动驾驶汽车;元胞自动机混合交通流模型;单向三车道混合交通流模型;双向T字形交叉口混合交通流模型;交通效率
中图分类号:TG333 文献标志码:A 文章编号:1003-5168(2022)9-0014-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.09.002
Influence of the Proportion of Autonomous Vehicles on Traffic
Efficiency in Mixed Traffic Flow
ZHANG Linqing LIU Xinyu CUI Fei TAN Xiwen
(School of Aeronautics and Astronautics,Shenyang University of Aeronautics and Astronautics,Shenyang 110136,China)
Abstract:In the actual application, the automatic driving vehicle will inevitably operate with the manual driving vehicle and form a mixed traffic flow.In order to explore the influence of the ratio of autopilot on the traffic efficiency of mixed traffic flow under different traffic tasks,this study builds a hybrid traffic flow model of single three lane and city two-way T intersection based on the hybrid traffic flow model of the cellular automaton and the right left overtaking rule,the two second rule and the intersection stopping line theory.The results show that traffic efficiency is directly proportional to the proportion of autopilot under simple road conditions,and the degree of impact is positively related to vehicle density in the safe traffic density.Under complex traffic conditions,the ratio of larger autopilot can significantly improve traffic efficiency when traffic density is small.When the density of vehicles is large,the proportion of autopilot will increase,which will deteriorate the efficiency of traffic.Therefore,the driving mode of autopilot needs to be further optimized.
Keywords:automatic driving car; cellular automata mixed traffic flow model; one way three lane mixed traffic flow model; mixed traffic flow model of two-way T-shaped intersection; traffic efficiency
0 引言
隨着汽车电子化和软硬件技术的不断迭代更新,自动驾驶技术越发成熟。在自动驾驶汽车普及过程中,会和手动驾驶汽车在道路上形成混合交通流。因此,研究自动驾驶汽车比例对混合交通流交通效率的影响有助于合理调整自动驾驶汽车的行驶模式、优化交通效率。本研究主要从单向三车道交通任务、双向T字形交叉路口[1]简单交通网络两个方面,分别建立基于右行左超车、两秒理论的单向三车道交通效率模型和基于元胞自动机模拟下的双向T字形模型来研究车流中自动驾驶车辆比例对交通效率的影响。
1 模型成立的前提假设
根据元胞自动机模型的假设依据,提出了适用于本研究的如下假设。
①假设道路为一理想交通流,无任何停止信号或交叉,无其他出入口和急转弯,对车辆类型不做讨论,车辆在道路上不会停车。
②按照道路的实际情况,模型中三条车道的最低与最高限速各不相同。
③行车时采用规定的“右行左超车”规则,不考虑换道时车辆加减速的中间过程。
④在道路上手动车与自动车随机分布,在仿真过程中,汽车按周期性循环的方式运行。车辆在每一个离散的[t]~[(t+1)]时间步长内,按给定的安全驾驶规则在各车道上同步向前行驶。
2 安全规则的建立
2.1 本能变道思维
根据“右行左超车”的道路行驶规则,如果车辆行驶速度小于实际预想速度且具备变道的条件,大部分司机都会选择变道行驶,但出于个人驾驶习惯的不同,仍存在小部分驾驶员会继续跟车行驶[2]。因此,对于手动驾驶汽车来说,若具备变道条件,会以一定的概率P1(P1<1)进行变道。对于自动驾驶汽车来说,出于对节能和驾驶效率的追求,满足变道条件时一定向左侧快车道变道;而向右侧慢车道变道的概率与乘车人的实际需求有关,此处近似等于手动车变道概率。用[wiji,t,k]=1来表示第i车道上第j辆车t时刻一定向第k车道变道,[wiji,t,k]=0表示第i车道上第j辆车t时刻不会向第k车道变道,自动驾驶汽车分两种情况,即向左变道[P2L]=1,向右变道[P2R=P1]。在查阅相关文献[3-4]后提出了3条安全驾驶规则。
2.2 加速规则
2.2.1 手动驾驶车。假设当前车辆速度小于最大允许行驶速度,且距同车道上前车的距离大于安全行驶间距,则以概率[Pa]加速。见公式(1)。
[vij=minvi max,vij+1,dij>dij safe且vij<vi maxvij ,其他情况]
(1)
式中:[vij]为第i车道上第j辆车的速度;[vi max]为第i车道上的速度上限;[dij]为第i车道上第j辆车与前车的间距;[dij safe]为第i车道上第j辆车与前车的安全间距。
2.2.2 自动驾驶车。假设当前车辆距同车道上前车间距大于或等于当前自动驾驶汽车的速度加1步长,且车速小于最大允许速度,则一定会增速。见公式(2)。
[vij=minvi max,vij+1,dij≥vij+11且vij<vi maxvij ,其他情况]
(2)
2.3 減速规则
2.3.1 手动驾驶车。假设当前车辆与同车道前车的距离小于安全间距,但大于或等于当前道路速度上限与下限的差值,则减速;若二者间距小于当前道路速度上限与下限的差,则速度减至速度下限。见公式(3)。
[vij=maxvi min,vij−1,dij<<dij safe且dij≥vi max−vi minvi min,dij<vi max−vi minvij,其他情况] (3)
式中:[vi min]为第i车道上的最小限速;第2种情况减速至速度下限是为了防止撞车。
2.3.2 自动驾驶车。假定当前车辆与同车道前车的距离小于自动驾驶车的速度,若间距大于或等于当前道路速度上限与下限的差,则速度减小1步长或减速至最小速度,若间距小于速度上限与速度下限的差,则减速至速度下限。见公式(4)。
[vij=maxvi min,vij−1,dij≤vij−1且dij≥vi max−vi min1vi min,dij<vi max−vi minvij,其他情况]
(4)
其中,第2种情况减速至速度下限同样是为了防止撞车。
2.4 变道规则
2.4.1 从中间车道向左变道。如果是手动驾驶车,距当前车道前方车辆的距离小于安全距离,而与相邻左车道上的前方车辆的间距较大,同时与左车道上后方车辆的间距超过安全距离,则车辆以[P1]的概率向左变道。这里要考虑换道的风险度,即换道的风险主要来自换道车辆与欲换车道上后方车辆的碰撞风险。其大小表现为换道行驶1个单位时间后,该车辆与后方车辆的距离大小。出于驾驶安全考虑,且驾驶员在行驶过程中很难准确地感知左后方车辆的速度,也无法判断左后方的车是处于自动驾驶还是手动驾驶状态。因此,为了保证换道的安全性,假定相邻车道后方的车辆全速行进,得到如下的换道规则。见公式(5)。
[cij=cij−1 ,dij<dij safe 且 dij lformer>dij safe 且 dij lback>1+vi−1 max−min{vij+1,vi−1 max} cij,其他情况]
(5)
式中:[cij]、[cij−1]分别指所处车道和相邻左侧车道;[dij lformer]、[dij lback]分别为距相邻左车道前方和后方车辆的距离;[vi−1 max]表示相邻左道上的最大限速。
如果是自动驾驶汽车,距前车的间距小于自动驾驶车所需保证的安全距离,与左后车也没有发生碰撞的风险,便向左侧变道。见公式(6)。
[cij=cij−1 ,dij<vij 且 dij lformer>vij 且 dij lback>1+vi−1 max−min {vij+1,vi−1 max} cij ,其他情况]
(6)
中间车道向右变道。如果是手动驾驶车,距相邻右车道前车与后车的距离均大于安全距离,则以[P1]的概率向右变道。见公式(7)。
[cij=cij+1 ,dij rformer>dij safe 且 dij rback>d(i+1)j safe cij ,其他情况]
(7)
式中:[cij+1]指相邻右车道;[dij rformer]、[dij rback]分别为距相邻右车道前方和后方车辆的距离;[d(i+1)j safe]为距右后方车辆的安全距离。
如果是自动驾驶车,距相邻右车道前、后方车辆的间距均大于安全距离,则以概率[P1]向右侧变道。见公式(8)。
[cij=cij+1 ,dij rformer>vij 且 dij rback>d(i+1)j safe cij ,其他情況]
(8)
2.4.2 最左侧车道变道。如果是手动驾驶车,在满足向右侧变道条件的基础上,还要判断位于其右方隔一个车道的相同位置上是否存在符合向左侧变道条件的车辆。若没有,则以概率[P1]向右侧变道;否则,则不能进行改道。见公式(9)。
[cij=cij+1, dij <dij safe 且 dij rformer>dij safe 且 dij rback>1+vi+1max−minvij+1,vi+1 max且mindi+2j lback , di+2j lformer<di+2j safe cij ,其他情况]
(9)
式中:[di+2j lformer]、[di+2j lformer]分别为最右侧车道中与当前车辆相同位置的车离中间车道前车和后车的距离;[vi+1max]是中间车道的速度上限。
如果是自动驾驶车,在满足向右变道条件的前提下,还要考虑位于其右方隔一个车道平行位置上是否有符合向左变道条件的车辆。若没有,则一定向右侧变道;否则,不进行改道。见公式(10)。
[cij]=[cij+1 ,dij <vij 且 dij rformer>vij且 dij rback>1+vi+1 max−minvij+1,vi+1 max且mindi+2j lback , di+2j lformer<di+2j safecij ,其他情况]
(10)
2.4.3 最右侧车道变道。如果是手动驾驶车,在具备向左变道的基础上,还要判断位于其最左侧车道相同位置上是否有符合向右变道条件的车辆。若没有,则以概率[P1]向左变道;若有,便不改道。见公式(11)。
[cij=cij−1 ,dij <dij safe 且 dij lformer>dij safe 且 dij lback>1+vi−1max−minvij+1,vi−1 max且mindi−2j rback, di−2j rformer<di−1j safe cij ,其他情况]
(11)
式中:[di−2j rformer]、[di−2j rback]分别为距最右侧车道前车和后车的距离;[vi−1max]是中间车道的最大限速。
如果是自动驾驶车,在满足向左变道的前提下,还要判断位于其最左侧车道相同位置上是否有满足向右变道条件的车辆。若没有,则一定向左变道;若有,则不改道。见公式(12)。
[cij]=[cij−1 ,dij <vij 且 dij lformer>vij且 dij lback>1+vi−1max−minvij+1,vi−1 max且mindi−2j rback ,di−2j rformer<di−1j safecij ,其他情况]
(12)
3 基于右行左超车和两秒理论的单向三车道交通效率模型
3.1 模型的建立
选定三条车道(见图1),假设每条车道上均能容纳1 000辆汽车,每辆汽车长度为4.5 m。根据元胞自动机模型,按照选定的安全行驶规则,使用Matlab软件建立相应的元胞自动机模型。受到司机反应时间的影响,自动车与手动车所对应的安全距离不同,同时考虑到相应模型的直观化,规定手动车所占元胞数为二,自动车为一,这样在模拟车辆变道时,手动车与自动车安全距离的差异与建立模型中因其长度的不同影响可近似相互抵消。模型程序输出结果示意图如图2所示。
3.2 模型的求解
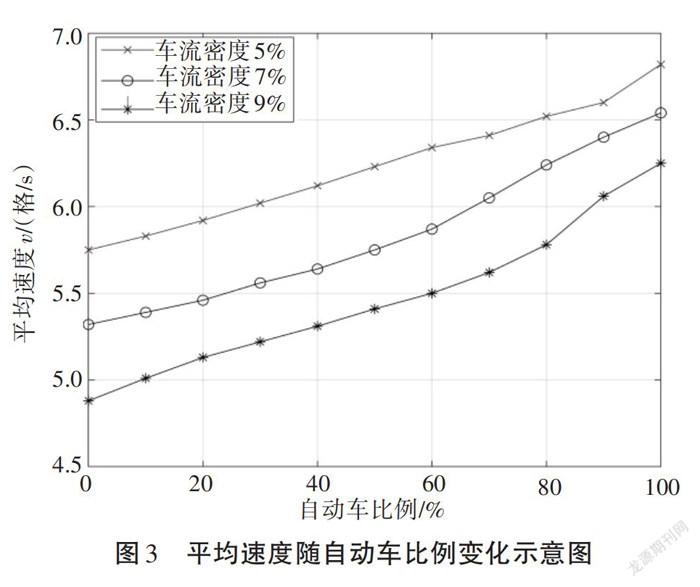
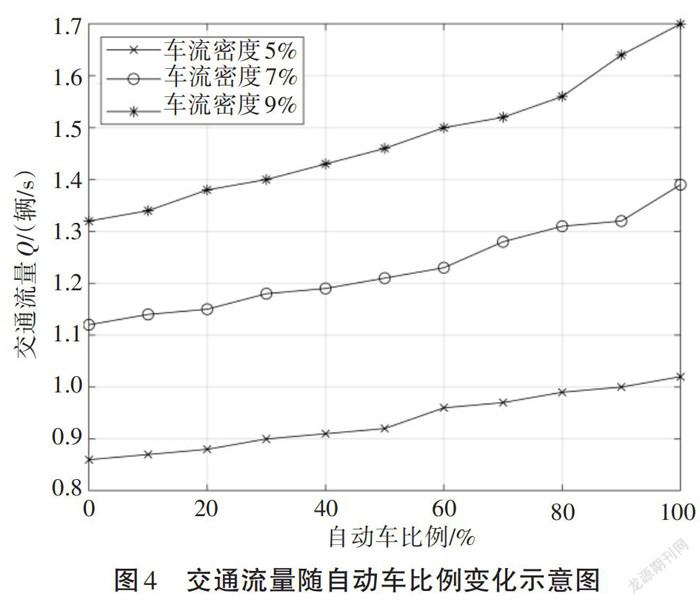
用全部车辆的平均速度作为交通效率的衡量标准,对三车道混合交通流模型进行数据分析,在相同概率设置下自动车比例与平均速度的关系如图3和图4所示。
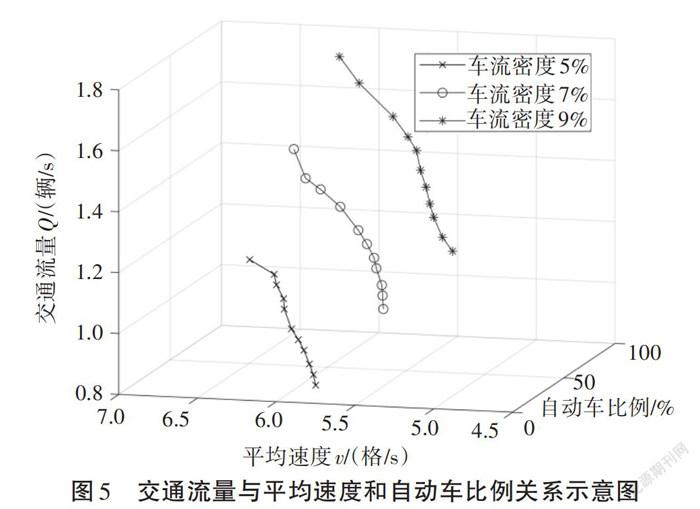
为了更加全面地分析问题,对模型进一步优化,在用平均速度表示交通效率的同时,额外引入交通流量Q[5]这一变量,并通过Matlab建模得出三者之间变化关系,如图5所示。
通过分析可知,单向三车道行驶时,车流的平均速度与自动车的比例呈正相关,且随着车流密度[6]的减少,自动车比例的改变对交通效率的影响程度逐渐降低。
4 基于元胞自动机模拟下的双向T字形模型
4.1 模型建立
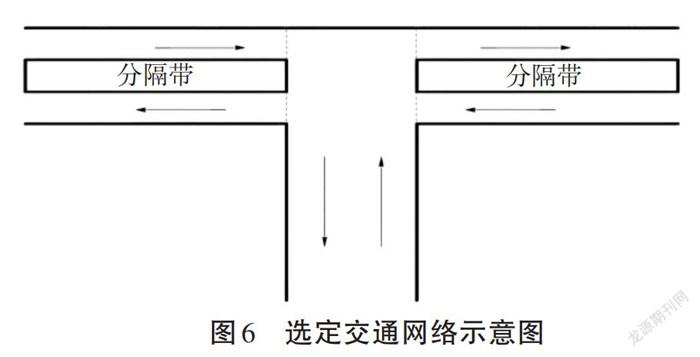
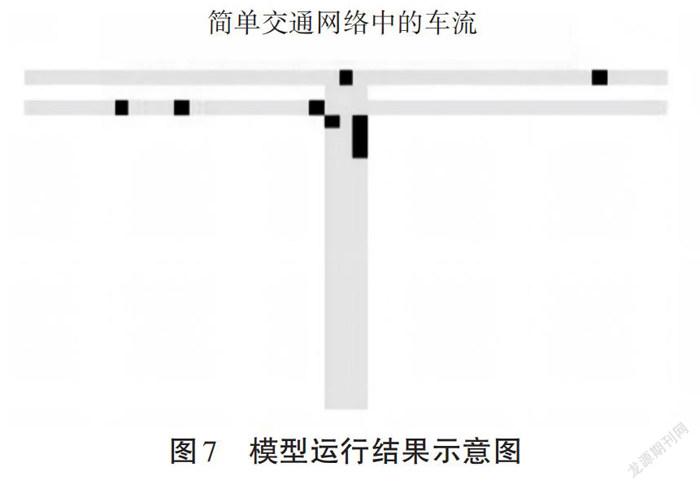
选定一个城市双向T字形交叉路口作为简单交通网络(见图6)。考虑到路口红绿灯时长及会车等待问题,通过改变车道入口处驶入新车辆的概率,来控制选定交通网络中的车流密度。假设每条车道上能容纳400辆汽车,每辆汽车的长度为4.5 m。其次,建立一个与手动车结构体内容完全相同的自动结构体(见图7),引入flag参数,其值为1和0,分别代表手动车和自动车。另外,本研究模型的建立规则是在给定规则的基础上,添加路口30 s红绿灯时长,以及会车时两辆车的谦让等待时长。
4.2 模型求解
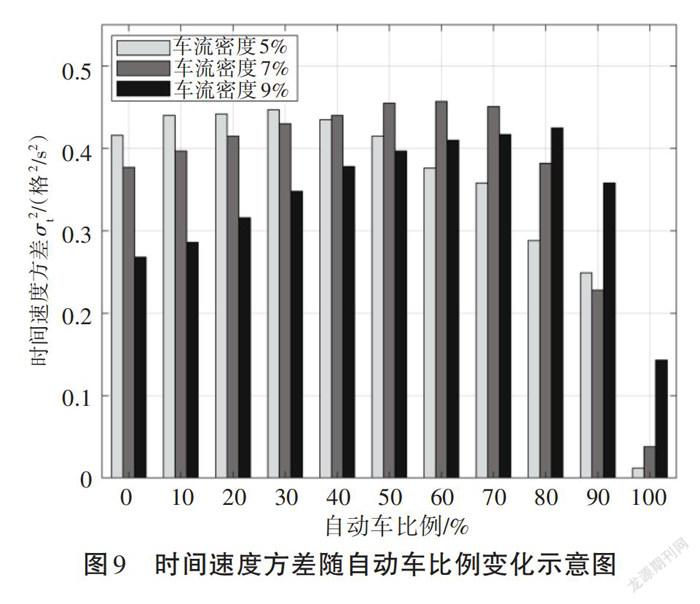
用全部车辆的平均速度作为交通效率的衡量标准,对双向T字形混合交通流模型[7]数据进行分析后可得,在相同的概率设置下,空间速率方差、时间速率方差与自动车比例的关系如图8、9所示。
通过对图8和图9分析可知以下结论。①车流密度较大时,行驶环境复杂,自动驾驶车比例增高不利于缓解交通压力。②车流密度较小时,自动驾驶车比例小于40%时对交通效率影响不大。③当自动驾驶车比例超过90%,两类车辆的速度方差明显下降。道路上几乎全是自动驾驶车,自动驾驶车很好地遵守驾驶规则,车流速度平稳,交通效率显著提高。但现实中自动驾驶车辆的比例很难达到这么大。
5 结语
通过以上分析知,在简单交通网络下自动驾驶车的比例越大,交通效率就越高,且优化效果与车流密度呈正相关。在复杂交通网络下,车流密度小时,较大比例的自动驾驶车才能提高交通效率;车流密度大时,自动驾驶车比例的升高反而降低了交通效率,只有几乎全是自动驾驶车时,交通效率才会显著提高。这表明自动驾驶车辆对我国组成复杂、分叉口多、交通分散、车种复杂的道路适应性不高,很难实现节约驾驶时间和提升交通效率的效果,驾驶模式仍待进一步优化和提升。
参考文献:
[1] 张晋.基于元胞自动机的城域混合交通流建模方法研究[D].杭州:浙江大学,2004.
[2] 董力耘,薛郁,戴世强.基于跟车思想的一维元胞自动机交通流模型[J].应用数学与力学,2002(4):331-337.
[3] 邢建民,李浩南,段得玉,等.自动驾驶汽车在交通网络中的效能分析[J].数学建模及其应用,2017(2):65-75.
[4] 王永明,周磊山,吕永波.基于元胞自动机交通流模型的车辆换道规则[J].中国公路学,2008(1):89-93.
[5] 谢军,严宝杰,张生瑞,等.城市环形交叉口通行能力理论模型[J].长安大学学报(自然科学版),2007(4):75-78.
[6] 樊永恒,李美玲,冉晋,等.自动驾驶车辆对高速公路混合交通流影响研究[J].武汉理工大学学报(交通科学与工程版),2022(1):28-32.
[7] 唐夕茹,陈艳艳,段卫静.城市路网畅通可靠度计算方法及其应用[J].城市交通,2011(2):40-46.
猜你喜欢
作文·初中版(2020年9期)2020-10-12
扬子江(2019年3期)2019-05-24
辽河(2019年2期)2019-03-22
珠江水运(2016年23期)2017-01-04
现代商贸工业(2016年22期)2016-12-27
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
考试周刊(2016年62期)2016-08-15
数学教学通讯·初中版(2015年5期)2015-06-17