
自主巡航四旋翼无人机电气控制系统设计研究
2022-06-06 05:33窦巧玲
科学与财富 2022年2期
窦巧玲
摘 要:将四旋翼无人机用于电力巡检和航拍巡查等工作中,有利于发挥设备的自主巡航功能,提高巡航效率,强化对设备的自动化控制。对于无人机的电气控制单元,需合理进行硬件方案的设计,科学选择摄像头、传感器、CPU芯片等装置,同时采用多种算法完成系统的性能测试与调试,完善电气控制系统的优化设计,并验证该方案的可行性。
关键词:自主巡航;四旋翼無人机;电气控制;系统设计
引言:近年来四旋翼无人机飞行技术始终是航空领域的热点内容,该技术在侦察营救、数据采集、地质林业勘探、森林防火以及病虫害防治中发挥着举足轻重的作用。凭借着自主巡航的使用功能,四旋翼无人机在各个领域的应用前景广阔,但是具体的控制功能却存在差异,且巡航方式也有所不同,通过对无人机电气控制系统的设计分析,可从中掌握巡航功能的具体情况。
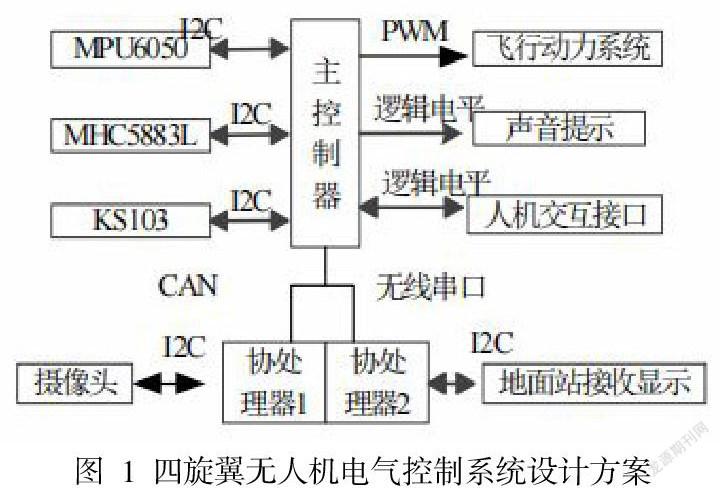
1.系统设计方案
随着无人机技术在各个行业与领域的广泛应用,无人机的自主巡航功能获得人们的广泛关注。无人机系统主要包含地面站与无人机两部分,双方在通信链路的作用下保持通信。无人机能够将实时飞行数据传输给地面站,同时地面站会向无人机发送控制指令。自动巡航飞行实际上就是经过地面站来设置航点,再由地面站将各个航点的信息传输给无人机,无人机依据提前设定的路线完成飞行任务,将实时图像传回地面站。当前四旋翼无人机自动巡航技术已经成熟的应用于电力巡检、航拍测量以及交通巡查等方面,无人机能够代替人工巡航造成的成本浪费,节约时间的同时可以提升巡航精确度[1]。
为了提升无人机对于位置与速度的控制精度,采取相应的硬件设计方案。图1为系统的整体硬件设计情况,其中OV7620代表的是系统的摄像头部分,具有较好的巡线功能;MHC58831代表的是磁力计部分,能够对无人机的运行方向进行自动识别,通过方向控制与调整完成无人机的自主巡航任务;KS103指的是波传感器,可以检测当前无人机的飞行高度,为垂直高度的闭环式控制提供科学参考依据;MPU6050指的是传感器模块,能够完成对无人机自动巡航偏差和加速度等数据的快速输出,从中获取无人机高度与经纬度数据偏差值,为接下来的无人机自主巡航飞行控制奠定基础。无人机的主控制器以STM32F405ZGT6芯片作为核心装置,芯片是32位CPU,在数据计算与处理方面应用突出,可对传感器检测到的实时数据进行传输,再经过数字滤波与无人机飞行姿态的融合处理,主控制器可以输出PWM信号,以此用于对无刷电机的有效控制,加强对飞行器姿态和高度的实时调控,采用闭环式控制模式实现设备自动巡航。
2.无人机电气控制系统设计要点
2.1四元素姿态融合算法的应用
正常情况下,人们使用的导航系统主要有“地理”和“载体”两个坐标系,这两个坐标系可以经过四元素完成转化,并对坐标系完成标定与修正。陀螺仪在积分中容易出现误差累计现象,所以四旋翼无人机在电气控制系统设计时应对俯仰角采取融合算法,比如6轴互补滤波算法,再以加速度修正陀螺仪来调整俯仰角的估算角度,明确陀螺仪的实际输出量,并达到无人机飞行姿态调整的目的。四元素姿态融合算法应用时,先经过算法的初始化计算,对加速度计数值进行归一化处理,随后经过加速度的误差计算与陀螺仪的修正,及时更新四元数,完成四元数的归一化,根据无人机当前运行的实际情况计算姿态欧拉角,最终即可实现坐标系的标定[2]。
2.2姿态平衡控制算法的应用
分析无人机在姿态控制方面的精度问题,采取PID控制算法达到姿态控制的目的。该算法应用过程中,以主控制变量作为角度,以副被控变量作为角速度,因副回路的作用突出校正效果,将干扰的影响降到最低。采用PID控制算法之后,串级控制系统当中,主回路与副回路分别为定值控制系统和随动控制系统,其中主调节器可以按照操作条件和当前负荷的实际变化,对调节器给定值做出有效校正,使无人机能够在已经给定的目标姿态下做出快速响应,使系统的角度控制效果显著提升。
对无人机进行姿态平衡测试,先调节内环角的速度环,基于单轴调节原理,将PID角速度的内环值设置为0,对轴进行一定程度的扰动测试,因角速度环为0,此时轴的速度不会变化,随着扰动的产生,手部能够感受到反抗力矩,撤除扰动影响之后,轴不会有超调现象,角度也不会发生振荡。完成了角速度的内环调试后,还需加各个轴的角度换,输入相关数值,以较小的油门查看无人机四轴飞行过程中的稳定,根据具体情况做好参数的调整,直到达到预期要求。
2.3定高控制算法的应用
无人机飞行期间会存在高度上的改变,如果不做好无人机飞行高度的有效控制,无人机的自主巡航功能将有可能受到影响,甚至无法达到预期任务要求。加强对无人机定高控制,使用超声波传感器,凭借设备的精度与速度进行无人机当前飞行高度的检测分析,再根据传感器提供的数据完成飞行器位置控制。关于姿态控制方案的设计,使用串级控制克服副回路扰动问题,飞行器定高能够控制高度与速度等参数,防止飞行器在工作期间出现突变。串级控制模式下,飞行器在垂直方向上的加速度可作为副回路控制量。本方案当中共有三个控制回路串联,分别为高度、速度以及加速度控制环。
2.4巡航控制算法的应用
无人机运行期间,电气控制系统中的巡航控制就是在第一时间获得巡航路线,依据路线发出控制命令,以此达到无人机自主巡航的目的。自主巡航的控制算法类似于上文提到的定高控制算法,采取三环路串级控制方式,摄像头可以提供位置环的控制量,加速度提供相应控制量,航线的提取需要将两个中心点连接在一起,通过点之间的比较来计算偏差,再取平均值即可。
总结:总而言之,具有自主巡航功能的四旋翼无人机在运行过程中,其电气控制系统以芯片为核心处理器,应用带有光电传感器的摄像头获得引导线信息。使用PID控制算法完成对无人机高度与方向、姿态的有效控制,从而达到自主巡航的目的。
参考文献:
[1]樊宝安,曾桂根.四旋翼无人机巡航飞行模式下的自主避障方案设计[J].电子设计工程,2020,28(02):180-184.
[2]袁粤杨,周子寒.无人机自主巡航与信息目标侦测打击[J].科技风,2019(32):11.785FB949-08A6-471D-8783-37112E228E33
猜你喜欢
通信电源技术(2018年5期)2018-08-23
电子制作(2018年2期)2018-04-18
电子制作(2017年19期)2017-02-02
山东工业技术(2016年15期)2016-12-01
机电信息(2014年20期)2014-02-27
河南科技(2014年10期)2014-02-27
