
结合PanSharpening与时空融合的GF-2和GF-1 WFV遥感影像融合方法
2022-06-06 06:01王宇恒李大成韩启金马灵玲栾海军
无线电工程 2022年6期
王宇恒,李大成*,韩启金,马灵玲,栾海军,杨 毅
(1.太原理工大学 矿业工程学院,山西 太原 030024;2.中国资源卫星应用中心,北京 100094;3.中国科学院空天信息创新研究院 中国科学院定量遥感信息技术重点实验室,北京 100094;4.厦门理工学院 计算机与信息工程学院,福建 厦门 361024;5.太原理工大学 物理与光电工程学院,山西 太原 030024)
0 引言
随着卫星传感器技术的快速发展,遥感观测手段被广泛应用于众多行业。但是由于卫星传感器技术的局限性,目前的遥感传感器无法同时满足高空间分辨率和高光谱分辨率[1]。高空间分辨率的全色影像有更宽的波段范围,低空间分辨率的多光谱影像的光谱范围更窄。为了收集更多的入射光能量,保证图像信噪比,多光谱传感器与全色传感器相比有着更大的瞬时视场,所以相比全色影像,多光谱影像的空间分辨率更低[2-3]。多光谱和全色影像的融合(PanSharpening)可以实现光谱信息和空间纹理信息的结合,解决卫星传感器空间和光谱分辨率的相互制约,生成高空间分辨率的多光谱影像[4]。其中,最传统的方法有Intensity-Hue-Saturation(IHS)变换、主成分分析变换(Principal Component Analysis,PCA)和格拉姆-施密特正交化(Gram-Schmidt,GS)变换等,但其融合结果有较大的光谱扰动。目前,已有大量文章对PanSharpening方法进行研究,越来越多新方法涌现出来。Meng等[3]将目前常用的PanSharpening方法主要分为基于分量替代(Component Substitution,CS)的方法、基于多分辨率分析(Multi-Resolution Analysis,MRA)的方法和基于变分最优(Variational Optimization,VO)的方法,还包括新兴发展的基于深度学习(Deep Learning,DL)的方法[5-6]。
与此同时,受卫星传感器自身材料、轨道参数以及成像大气条件的影响,无法同时满足高空间分辨率和高时间分辨率,这使得多数地区在一年中也难有多幅清晰可用的高分辨率影像[7]。然而,多源遥感影像时空融合技术能有效解决这一难题。早期时空融合模型是在传统全色多光谱融合方法的基础上发展起来的,但是从引入基于线性模型的混合像元分解方法开始才真正具有“时空”意义。Maselli[8]第一次提出了距离权重这一指标,认为当与目标像元的距离值越小时,其对目标像元的影响也就越大,这一思想在后续时空融合算法中得到了应用,但是在某些条件下,临近像元之间的反射率存在一定差异。因此,Busetto等[9]在线性回归模型的基础上进行了改进,提出了光谱权重的思想,通过综合考虑空间和光谱两方面的影响,使得在求取线型混合模型的过程中,大大缓解了像元反射率的空间可变性问题。而邬明权等[10]根据类别与类内像元之间反射率值随时间改变的规律一致的假设,发展了一种运用预测时相前后2个时相的高低分辨率影像,获取时序高分辨率影像的融合(Spatial and Temporal Data Fusion Approach,STDFA)模型,大大推进了时空融合模型的应用。依据时空关联模型应用技术框架的不同,时空融合技术可大致分为3类:基于数据重建的融合方法、基于光谱变换的融合方法以及基于学习的融合方法[11]。
Shen[12]首次提出时-空-谱一体化融合的概念和框架。Meng等[13]、孟祥超[14]和Shen等[1]在多传感器融合框架下进一步扩展,发展了多传感器时-空-谱一体化融合方法,虽然该类方法整体性较好,但是效率较低[15],且实现难度较高,实际应用中难以开展。孟祥超等[15]通过GF-1全色、多光谱、GF-5高光谱影像融合得到具有GF-1全色影像空间分辨率的GF-5高光谱影像,但是只用到了基于MRA的PanSharpening方法,未充分考虑时谱信息。
传统PanSharpening方法没有考虑时相信息,而时空融合模型没有应用全色波段的空谱信息。针对上述问题,提出了一种结合PanSharpening和时空融合模型的遥感影像融合方法。本文以GF-1和GF-2卫星影像为数据源进行研究,最终得到具有GF-2全色影像空间分辨率和GF-1 WFV影像时间分辨率的融合结果。通过对不同下垫面类型数据测试,并从定性和定量两方面进行验证评价,证明该方法的可行性。
1 研究方法
本文研究技术路线图如图1所示。以GF-2多光谱和全色影像以及GF-1 WFV多光谱影像为实验数据,先对所有原始影像进行预处理,得到空间位置对应、像元大小一致的地表反射率数据;然后,利用MTF-GLP-HPM方法对起始时刻GF-2多光谱和全色影像进行融合,得到分辨率为1 m 的GF-2多光谱数据;最后,以起始时刻t1分辨率为1 m的上述融合结果和16 m分辨率的GF-1 WFV数据以及任意预测时刻tk的GF-1 WFV数据为输入,使用STARFM方法进行时空融合,最终得到具有GF-1 WFV影像时间分辨率和GF-2全色影像空间分辨率的GF-2多光谱数据。
PanSharpening方法起源于20世纪80年代[16],在过去近40年里,PanSharpening方法得到了飞速的发展。常见的3类方法各有优势,而且相同的算法应用在不同的卫星影像具有不同的结果,但总体而言,基于MRA方法的融合结果光谱保真度较基于CS方法更好[17],运行效率比基于VO方法更优[3],因此被广泛的使用,本文使用光谱保真度高、运行效率快的MTF-GLP-HPM[18]方法。该方法共由3部分组成:调制传递函数(Modulation Transfer Function,MTF)、广义拉普拉斯金字塔(Generalized Laplacian Pyramid,GLP)和高通滤波调制方法(High Pass Modulation,HPM),MTF-GLP用来对全色影像进行频率变换,分离出全色影像的高、低频信息,该方法已被普遍认可为较优方法。然后通过式(1)中的HPM[19]注入模型,将全色影像的高频纹理信息注入到多光谱影像各个波段中,得到具有高频纹理信息的多光谱影像。
(1)
式中,H为融合后高分辨率多光谱反射率数据;MS为原始多光谱反射率数据;PAN为全色波段反射率数据;PANL为全色数据的低频成分。因为只是将全色影像的高频纹理细节加入到多光谱影像中,所以原始多光谱影像的光谱信息基本未受影响,得以保留,融合结果有较好的光谱保真度。
PanSharpening方法可以提升影像的空间分辨率,但无法改变影像的时间分辨率。时空融合专门用来解决高分辨率影像时序不足的问题。当前,应用最为广泛的是基于数据重建思想所发展起来的时空融合方法,其中最具代表性且适用性较强的是Gao等[20]提出的时空自适应反射率融合模型(Spatial and Temporal Adaptive Reflection Fusion Model,STARFM)。本文使用STARFM方法进行研究,STARFM方法的基本思路为:
(2)

STARFM方法运行的核心步骤是均匀同质像元的选择和提取。均匀同质像元具有相似的光谱特性。一个低分辨率影像的同质像元可以由相同时间高分辨率影像对应像元的反射率来表示:
H(xi,yj,t1)=L(xi,yj,t1)+ε1,
(3)
式中,H(xi,yj,t1)和L(xi,yj,t1)分别为高、低分辨率影像在任意已知起始时刻t1的反射率值;ε1是二者的反射率差异,假设ε1不随时间变化,则存在:
H(xi,yj,t1)=L(xi,yj,t1)+H(xi,yj,tk)-L(xi,yj,tk),
(4)
式中,tk表示除已知时刻外任意可用时刻。而在实际情况中,由于低空间分辨率的扫描视场很大,观测量很可能不是同质像元,而且同一区域的地表覆盖类型在不同时间可能发生变化。由于光照差异也会引起相应的反射率变化,因此,STARFM方法引入了权重函数Wijk来解决上述问题引起的反射率预测误差。
H(xi,yj,tk)-L(xi,yj,tk)),
(5)
式中,w代表搜索窗口的尺寸;(xw/2,yw/2)为搜索窗口的中心像元。在STARFM方法中,通过时间、光谱和空间三方面特征信息对最终的权重函数进行计算,具体包括时相差异Tijk、光谱差异Sijk、中心像元(xw/2,yw/2)和候选像元(xi,yj)在tk时刻的空间距离dijk,表达式如下:
Tijk=|L(xi,yj,tk)-L(xi,yj,t1)|,
(6)
Sijk=|H(xi,yj,tk)-L(xi,yj,tk)|,
(7)
(8)
式中,A为特定常数,联合光谱差异、时相差异和空间距离可得到Cijk:
Cijk=Tijk×Sijk×dijk。
(9)
最后,权重Wijk可表示为:
(10)
2 实验过程及结果
2.1 实验数据情况介绍
为验证本文研究方法的适用性,选取不同下垫面类型的研究区进行实验,如图2所示,具体包括自然植被覆盖山地、人工作物覆盖农田、建筑物覆盖城区和沙地4种类型(后续简称山地、农田、城区和沙地)。
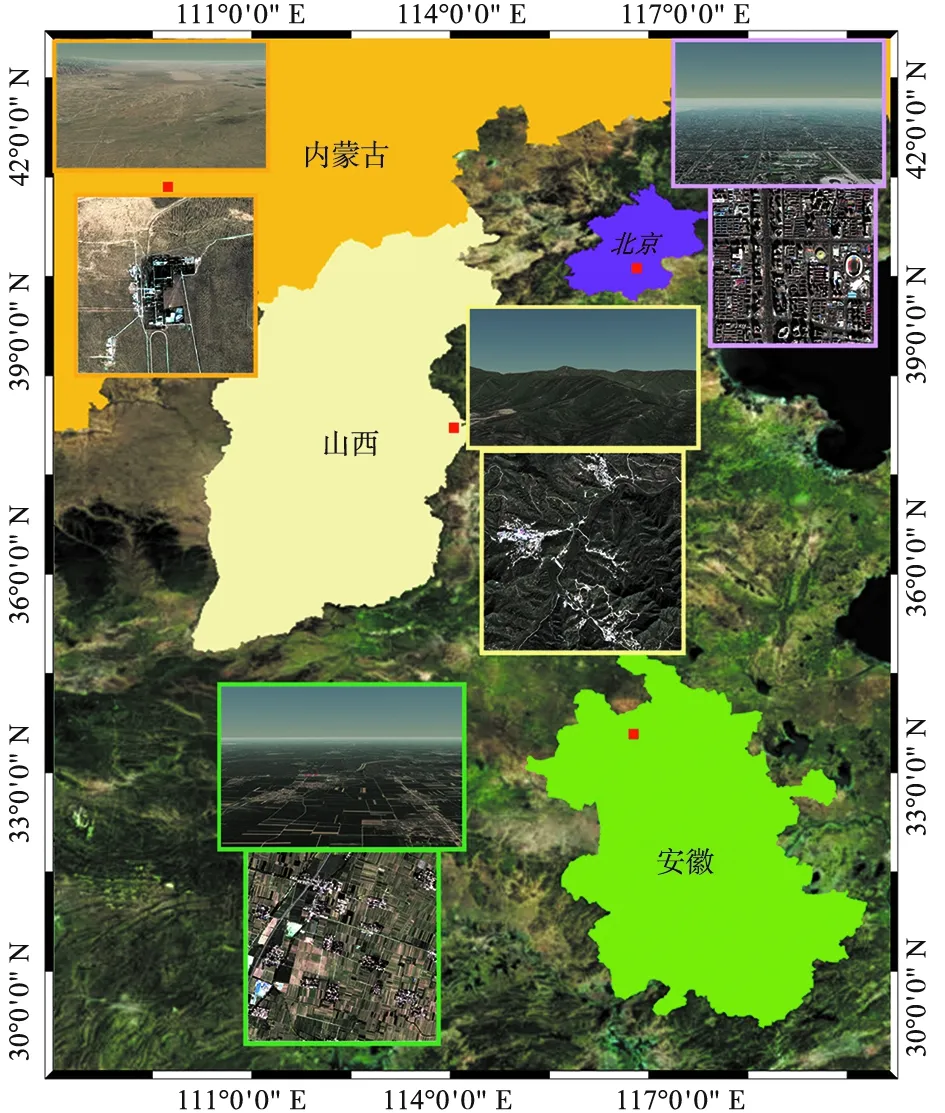
图2 研究区位置、遥感影像及地形示意Fig.2 Location,remote sensing image and topographic map of the study area
自然植被山区位于山西省阳泉市平定县,地处山西省中部东侧,多为山地和丘陵,研究区大小为4 km×4 km,区域内主要以自然草地、灌木为主,还包括少量人工建筑。人工作物农田区位于安徽省亳州市北部,地处华北平原中部,地势低平,研究区内主要以人工作物覆盖为主,还包含少量建筑及水体,研究区大小为4 km×4 km。城市建设区位于北京市城区,建筑物密集分布,楼群高低不一,建筑物阴影较多,此外还包括行道树、水体等覆盖物,研究区大小为2 km×2 km。沙地区位于内蒙古包头市西北部,是国家高分辨遥感综合定标场所在地,除少量人造靶场外均为沙地,几乎无植被覆盖,同质性较强,研究区大小为2 km×2 km。
实验选用GF-1 WFV和GF-2影像进行研究,具体实验影像基本信息如表1所示。可以看出,2种数据多光谱各波段波长范围一致,而且GF-2全色波段波长范围和多光谱波长范围基本重合,有利于减少PanSharpening造成的光谱失真[3]。
2.2 实验方案
2.2.1 数据预处理
在融合实验前,要对参与融合的所有多光谱和全色影像进行必要的预处理,主要包括正射校正、辐射定标和大气校正。经过预处理的影像实现了由原始DN值到地表反射率的转换,最终影像各波段像元值为反射率×10 000,有效数据范围为0~10 000。同时,为了减少几何位置误差对融合结果的影响,还需要对影像进行精细几何配准,各研究区影像以月份靠前的GF-2全色影像为基准,对其他影像进行空间配准,并将GF-1 WFV和GF-2多光谱影像都采样至全色影像像元尺度(1 m)进行裁剪,确保所有实验影像的像元尺寸和空间位置相对应。
2.2.2 实验过程
本文将PanSharpening和时空融合相结合,在传统图像融合的基础上提升遥感影像的时间分辨率,在时空融合的基础上进一步提升遥感影像的空间分辨率。为了验证该融合思路的适用性,选取4个不同地物覆盖类型的研究区进行实验,具体实验方案如下:
① 山地研究区选择2020年9月19日为起始时刻,首先对该时刻GF-2多光谱和全色波段利用MTF-GLP-HPM方法进行融合,将多光谱影像空间分辨率提升至1 m,融合结果作为起始时刻高分辨率影像;然后以起始时刻GF-1 WFV多光谱影像(16 m)为低分辨率影像,2020年11月7日GF-1 WFV多光谱影像(16 m)为预测时刻低分辨率影像,通过STARFM时空融合算法得到预测时刻对应的高分辨率影像,空间分辨率为1 m。
② 农田研究区选择2017年7月23日为起始时刻,2017年11月8日为预测时刻,先通过MTF-GLP-HPM方法将起始时刻GF-2多光谱影像分辨率提升至1 m,再进行时空融合,得到预测时刻分辨率为1 m的融合结果。
③ 城区研究区选择2015年2月17日为起始时刻,2015年8月28日为预测时刻,同样先通过MTF-GLP-HPM方法将起始时刻GF-2多光谱影像分辨率提升至1 m,然后再进行时空融合,得到预测时刻分辨率为1 m的融合结果,因该区域没有对应预测时刻的真实GF-2影像,选择邻近时刻2015年9月2日GF-2作为验证数据,一般认为8 d内地表反射率的变化量极小[21]。
④ 沙地研究区选择2017年7月10日为起始时刻,2017年9月21日为预测时刻,利用MTF-GLP-HPM方法将起始时刻GF-2多光谱影像分辨率提升至1 m后,再利用STARFM方法融合出预测时刻空间分辨率为1 m的高分辨率影像。
为了验证融合思路的有效性,实验进行2组对照实验,分别是:
① 对各研究区预测时刻的GF-2多光谱(4 m)和全色影像(1 m)进行融合;
② 对各研究区GF-2多光谱影像(4 m)与GF-1 WFV影像(16 m)直接进行时空融合。2组对照实验结果与本文融合方法结果分别进行对比。
2.2.3 融合质量评价方法
为合理评估本文融合方法实验结果的精度和性能,采用定性与定量相结合的评价方法。定性方法主要依靠目视观察,通过对比影像之间的光谱色彩以及整体和局部细节来评定融合效果。定量方法通过对融合结果和参考影像进行光谱值及其计算量之间的比较,从而确定融合效果好坏。具体包括2种方式:一是分析融合结果与参考影像各波段的光谱散点图;二是从误差与数据相似性的角度出发,采用均方根误差 (Root Mean Squared Error,RMSE)、峰值信噪比(Peak Signal to Noise Ratio,PSNR)、结构相似性(Structural Similarity,SSIM)、光谱角映射(Spectral Angle Mapper,SAM)以及相对整体维数综合误差 (Erreur Relative Global Adimensionnelle de Synthèse,ERGAS)等定量统计评价指标,具体方法原理如下:
(11)
(12)
(13)
(14)
(15)
式(11)~(15)中,Pi和Ri分别代表待评价影像和参考影像的第i∈[1,B]波段;N1N2为影像尺寸大小;MAXPi表示影像Pi中的最大像素值;MSE表示影像P的均方误差,其数值为RMSE值的平方;μPi,μRi,σPi,σRi和σPiRi分别为影像P和R在波段i上的均值、标准差以及协方差;c1=(k1L)2,c2=(k2L)2是常数,L是2幅影像的灰度等级,k1=0.01,k2=0.03;ρPi和ρRi是影像P和R在波段i上的地表反射率;p和r为影像P和R的空间分辨率。
当评价结果中RMSE越小,表示融合结果和参考影像差异性越小;PSNR越大,表示融合结果影像失真越少,质量越高;SSIM越大,表示融合结果与参考影像之间的相似程度更高;SAM表示融合图像与参考图像之间的光谱扭曲程度,值越小,表示二者差异越小;ERGAS值越小,说明融合结果的光谱误差越小。目视定性评价具有主观性,需要与定量评价指标相结合,才能客观准确地分析融合结果的好坏。
2.3 测试结果
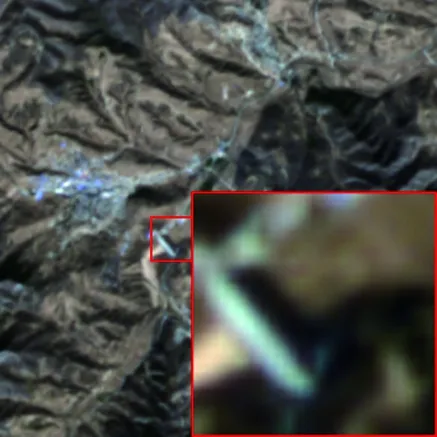
自然植被山地研究区实验结果如图3所示,图3(a)和(b)为GF-1 WFV多光谱影像,几乎无法看出纹理细节,对比2个时刻原始GF-2多光谱影像图3(c)、(d)和经过PanSharpening后的影像图3(e)、(f),从目视效果看,原始多光谱影像经过PanSharpening后能有效提升空间分辨率,细节纹理更加清晰,在此基础上进行时空融合所得到的预测结果(图3(h))空间和光谱信息都有不错的效果。图3(g)为传统时空融合思路的结果,即GF-2不经过PanSharpening,直接使用多光谱数据与低分辨率GF-1 WFV影像进行时空融合,融合结果分辨率为4 m,可以看出相对于预测时刻低分辨率影像图3(b)而言注入了大量的纹理细节,但是对于变化地物的空间信息预测不完整,而光谱保真效果不错。本文融合方法所得结果与图3(g)相比,在光谱差异不大的基础上加入了更多的空间纹理信息。

(a) GF-1 WFV多光谱 (9月19日)
(b) GF-1 WFV多光谱 (11月7日)

(c) GF-2多光谱(9月19日)

(d) GF-2多光谱(11月7日)

(e) GF-2融合结果(9月19日)

(g) 传统STARFM(11月7日)

(h) 本文融合方法(11月7日)
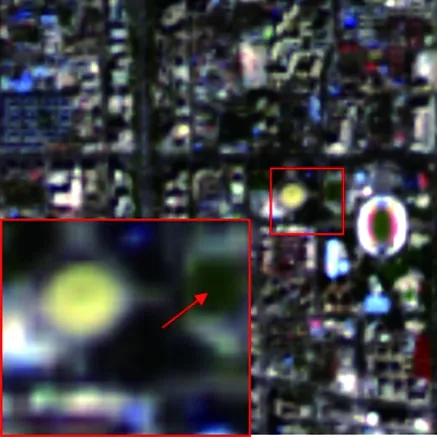
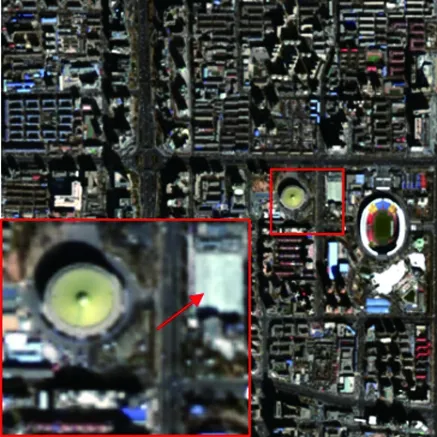
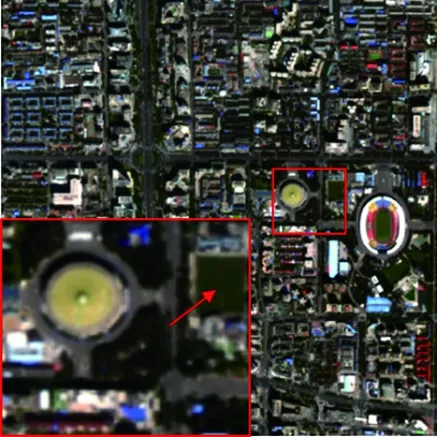
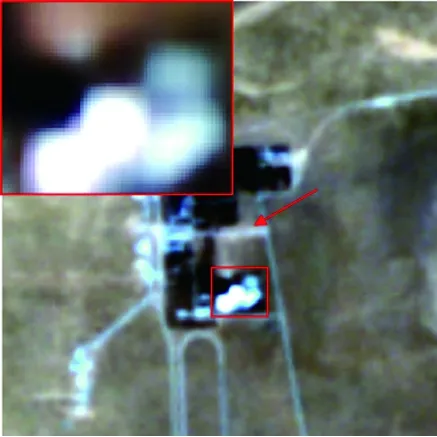
图4~图6分别展示了农田、城区和沙地3个研究区的实验结果。由图4(c)和(e)以及图4(d)和(f)对比看出,PanSharpening融合前后影像光谱色彩几乎无差异,融合后结果空间纹理清楚,在图5和6中有同样的实验效果,表明MTF-GLP-HPM图像融合方法有好的光谱保真效果。最终融合结果图4(h)中放大区域对比原始GF-2多光谱影像可以发现,变化地物的光谱信息预测较为准确,但相应区域的纹理信息效果不明显,但是对于不变地物,纹理信息和光谱信息都有较好的效果。同样,在图5放大图像中可以看出,右侧空地在2月17日显示为白色(降雪结冰),在9月2日显示为绿色,图5(h)放大区域显示右侧空地为绿色,变化的光谱信息加入了预测结果;同时可以看出中间的植被在2月17日显示为黄灰色(枯萎状态),在9月2日显示为深绿色,本文融合方法结果(图5(h))中放大区域中间植被也注入了一定的绿色光谱信息,但相对空间纹理细节较少。图6实验区域为同质性较好的沙地场,图中箭头所指区域为突变地物,从图6(h)中看出该区域加入了明显的光谱预测信息和少量纹理信息,其他不变地物预测信息良好。对比各研究区传统时空融合结果(g)和本文融合思路结果(h)可以看出,(h)在光谱色彩接近的情况下,空间纹理信息更加丰富,细节更加清晰。

(a) GF-1 WFV多光谱 (7月24日)

(b) GF-1 WFV多光谱 (11月8日)

(c) GF-2多光谱(7月23日)

(d) GF-2多光谱(11月8日)

(e) GF-2融合结果(7月23日)

(f) GF-2融合结果(11月8日)

(g) 传统STARFM(11月8日)

(h) 本文融合方法(11月8日)

(a) GF-1 WFV多光谱 (2月17日)
(b) GF-1 WFV多光谱 (8月28日)
(c) GF-2多光谱(2月17日)
(d) GF-2多光谱(9月2日)

(e) GF-2融合结果(2月17日)

(f) GF-2融合结果(9月2日)

(g) 传统STARFM(8月28日)

(h) 本文融合方法(8月28日)

(a) GF-1 WFV多光谱 (7月10日)
(b) GF-1 WFV多光谱 (9月21日)

(c) GF-2多光谱(7月10日)

(d) GF-2多光谱(9月22日)

(e) GF-2融合结果(7月10日)

(f) GF-2融合结果(9月22日)

(g) 传统STARFM(9月21日)

(h) 本文融合方法(9月21日)
各研究区起始时刻GF-2全色多光谱融合后结果与原始多光谱影像的对比评价指标如表2所示。综合来看,沙地研究区和平原农田区的定量评价指标排在前2位,山地和城区次之。各研究区SSIM均在0.9以上,RMSE均小于0.03。
为验证本文融合方法的有效性,增加传统时空融合结果作为对照。方案1:预测时刻原始GF-2多光谱影像和传统时空融合结果对比评价;方案2:预测时刻原始GF-2多光谱影像和本文融合方法结果对比评价。表3给出了各研究区融合结果的定量分析指标,整体结果显示各个研究区中方案1与方案2各项指标均较为接近,但前者优于后者,在2种方案中各个研究区各项指标的整体变化趋势是一致的。沙地研究区在各项指标中均为最优,农田区各项指标最差。

表2 起始时刻GF-2 PanSharpening结果定量评价指标

表3 融合结果定量评价指标
图7展示了各研究区2种方案逐波段的定量评价指标,可以看出整体上2种对比方案的各项指标波段变化趋势基本一致。除农田区外,其他研究区测试数据各项指标随波段变化波动较小,农田区中各波段定量评价结果波动较大,且近红外波段结果最差。
图8展示了原始GF-2多光谱影像和传统时空融合结果以及本文融合方法结果逐波段的光谱散点分布图。从图中可以看出,与定量评价指标结果一致性较高,整体而言散点图分布质量沙地研究区优于山地研究区优于城区优于农田区。图中整体散点在在1∶1线附近分布,表明本文思路的融合结果有不错的效果。

图7 各研究区逐波段定量评价指标Fig.7 Band by band quantitative evaluation index of each study area

图8 各研究区实验结果光谱散点分布图Fig.8 Spectral scatter distribution of experimental results in each study area
3 结果分析与讨论
3.1 融合结果与下垫面类型的关系
从表2结果来看,全色多光谱融合结果定量评价指标沙地和农田最好,山地和城区次之,主要原因在于沙地研究区和华北平原农田区地势平坦,几何配准误差较小,同时实验区域内无高差明显的地物,几乎无阴影区域,地表光谱一致性较好,所以融合结果最优。城区定量评价结果最差,主要原因在于城区内建筑物密集且阴影较多,地表均一性和朗伯性差。山区虽然地表覆盖单一,同质性强,但是山区地形影响几何校正及配准精度,所以结果较差。
表3给出的传统时空融合方法定量评价指标在不同研究区的整体变化趋势与本文融合方法一致,但指标较优。原因在于本文方法中GF-2在经过PanSharpening后不可避免地引入了光谱扰动,而且后续时空融合高低分辨率影像空间分辨率比率由4倍增大为16倍,会造成预测结果精度的损失。其中SSIM和RMSE指标相对精度损失分别小于0.08和0.02,在整体光谱变化较小的情况下,本文融合方法能加入更清晰的空间纹理信息,空间分辨率提升了4倍。
2种对比方案中,4个研究区的融合结果优劣排名依次是沙地、山地、城区和农田,主要原因是农田区人工作物在7月正处于生长旺盛期,11月已过秋收季节,地表覆盖类型发生突变,这是现有时空融合算法的局限[22-23],所以该研究区融合结果定量评价表现最差。城区地表覆盖情况异质性较强,地物破碎度高,所以融合效果较差,而且有参考影像与预测结果时序不一致的影响。山地研究区地表覆盖类型相对单一,而且人为突变情况较少,所以有不错的定量评价结果。而在同质性更强的沙地研究区,地表覆盖几乎没有变化,定量评价指标最好。
从图7中可以看出,农田区近红外波段评价指标最差,而沙地区近红外波段评价指标最优,主要原因还是在于该区域人工作物在预测前后发生了突变,造成对植被信息敏感的近红外波段预测信息缺失严重。沙地区基本无植被覆盖,且地表变化较小,所以近红外波段融合效果最好,且各波段评价指标变化缓和。从图8光谱散点图也可以看出,农田区光谱散点图近红外波段偏离中心较远且离散程度大,而沙地区密集分布在中心线两侧。
3.2 融合质量与影像光谱的关系
实验采用的GF-2全色和多光谱影像光谱范围重合,有利于减少全色多光谱融合过程引入的光谱扰动,但是无法避免。
表4展示了起始时刻和预测时刻GF-1 WFV多光谱影像的光谱一致性程度,可以看出沙地两时刻数据一致性最高,农田区两时刻数据光谱一致性最低,与融合结果定量评价指标一致。逐波段光谱一致性如图9(a)所示,沙地和山地各波段光谱一致性较为均匀且效果最好,主要原因是该区域地表覆盖类型均匀,且人为突变较少。城区近红外波段一致性较为突出,主要原因是城区地表覆盖植被较少,但总体结果较差,原因在于城市建筑物形态分布各异,地物种类繁多,异质性强。农田区近红外波段光谱一致性最差,原因在于人工作物在收割后植被信息发生巨变。分析表明:起始时刻和预测时刻GF-1 WFV多光谱影像的光谱一致性大小与最终融合结果的好坏呈正相关。

表4 实验影像光谱一致性
图9(b)为起始时刻GF-1 WFV和融合后GF-2多光谱影像的逐波段光谱一致性指标,可以看出,同一区域各波段光谱一致性差异不大,表4中影像整体光谱一致性显示,沙地区起始时刻GF-1和PanSharpening后GF-2光谱一致性结果最优,城区结果最差。
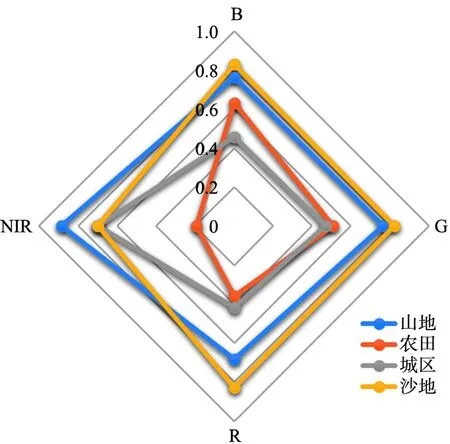
(a) 起始时刻和预测时刻GF-1 WFV

(b) 起始时刻GF-1 WFV和融合后GF-2图9 影像逐波段光谱一致性Fig.9 Band by band spectral consistency of image
各研究区使用数据源相同,所以假设由空间尺度不同带来的光谱一致性差异相同,仅考虑传感器成像时间差异的影响,起始时刻GF-1 WFV和GF-2影像在1 d内的成像时间如表5所示。
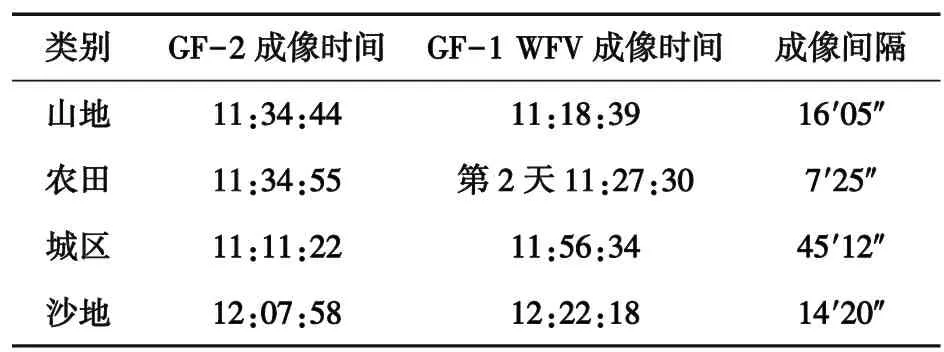
表5 起始时刻GF-1 WFV和GF-2成像时间(北京时间)
可以看出,城区两卫星传感器成像时间相差最大,达到45′12″,所以地表光谱变化最大,而且在上述分析中城区GF-2全色多光谱影像融合结果相对较差,也会影响与GF-1 WFV影像光谱的一致性。农田区成像间隔为7′25″,但从表1可知两传感器成像绝对时间相差1 d,所以虽然成像时间相差最小,但是光谱一致性却不是最佳。分析看来,起始时刻GF-1 WFV和GF-2多光谱影像光谱一致性大小和最终融合结果的好坏有一定相关性,但不是主要影响因素。
4 结束语
本文针对目前遥感观测平台的局限性造成无法同时获取高时空遥感影像的实际情况,同时传统空谱融合和时空融合方法都未同时综合考虑全色影像和高分辨率多光谱影像的高清空谱信息以及低分辨率多光谱影像的高时谱信息,提出了一种PanSharpening和时空融合相结合的数据融合思路,基于MTF-GLP-HPM和STARFM方法的融合方法,能够生成具有全色波段空间分辨率和低分辨率多光谱影像时间分辨率的多光谱融合影像。
实验结果从目视效果来看,不同研究区融合效果都有不错的效果,定量评价指标显示,对于不同下垫面类型,整体融合效果有较大的差异,对于地表均一性较好的研究区,SSIM可达0.9以上。通过不同研究区实验结果定性及定量分析可以得出:
① 使用PanSharpening和时空融合相结合的融合路线可以获得同时具备高时间、空间分辨率的遥感影像,该技术思路具有可行性。
② 通过不同下垫面研究区结果发现,同质性较强的研究区,融合效果优于异质性较强的区域,主要受当前时空融合算法的局限性影响。起始时刻和预测时刻低分辨率影像的光谱一致性高低对最终结果有较大的影响。起始时刻的高低分辨率影像光谱一致性差异不是影响最终融合结果的主要因素。
③ 由实验结果目视效果看出,该思路融合方法对于变化地物的光谱信息融合效果优于空间纹理细节,尤其对于突变地物,空间细节预测不够充足,这与时空融合方法有密切的关系。
研究证明了通过将PanSharpening和时空融合进行结合,能有效集成全色影像和高、低分辨率多光谱影像间的时、空、谱互补信息,得到相对传统时空融合方法更高空间分辨率的融合影像。本文实验算法较为单一,只使用了应用广泛的算法。在下一步研究中,会继续探索适用于不同地物覆盖类型研究区的PanSharpening和时空融合方法的组合,研究针对各类型下垫面的融合策略,而且会进一步以高光谱影像进行研究,得到同时具有超高空间、时间和光谱分辨率的融合影像。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
九江学院学报(自然科学版)(2022年2期)2022-07-02
航天返回与遥感(2022年2期)2022-05-12
黑龙江大学自然科学学报(2022年1期)2022-03-29
波谱学杂志(2022年1期)2022-03-15
家庭影院技术(2021年7期)2021-08-14
华北理工大学学报(自然科学版)(2021年3期)2021-07-03
家庭影院技术(2020年8期)2020-09-11
参花(上)(2020年9期)2020-08-03
航天返回与遥感(2019年4期)2019-10-12
