多技术融合的室内无线定位方法发展综述
2022-06-10 03:48陈沛宇袁勤政戴鹏飞袁志刚
导航定位学报 2022年3期
陈沛宇,袁勤政,戴鹏飞,邹 亮,吴 晓,袁志刚,汪 佩
(武汉纺织大学 湖北省数字化纺织装备重点实验室,武汉 430200)
0 引言
室外无线定位技术作为一项成熟的技术,已经融入了人类生活的方方面面。如全球卫星导航系统(global navigation satellite system, GNSS)在室外场景中,能够提供准确的地理位置、行车速度等信息,给人们的日常生活带来了极大的便利。但是在室内条件下,由于建筑物的阻挡,GNSS无法实现精准定位、提供稳定的位置信息。
据调研显示,人们平均只有10%~20%的时间在室外,大多数时间是在室内活动,对室内无线定位的需求日益增多。工业物联网设备、人员定位以及各类型机器人等的室内定位需求,促进人们展开对室内定位技术的进一步研究。超宽带(ultrawide band, UWB)、射频、无线保真(wireless fidelity,WiFi)、惯性导航等室内无线定位技术应运而生,并逐渐应用到各行各业中。但是随着社会发展,现在这些室内定位技术无法满足人们对定位精度、覆盖范围、成本等的更高要求,室内无线定位技术有待提高。
近年来,有学者提出了将两种或多种室内定位技术融合成新的型室内无线定位技术,将不同技术进行优势融合,可获得更好的定位性能。本文介绍了目前流行的多技术融合的室内无线定位方法,分析了各自方案的原理及其关键性问题,对其发展趋势进行展望。
1 多技术融合的室内无线定位方法发展现状
目前流行的室内无线定位有蓝牙、WiFi、超宽带和惯性导航等,这些室内定位技术分为两类:1)基于外置信号源的室内定位技术,包括 WiFi、蓝牙、超宽带等;2)基于天然信号源的室内定位技术,包括惯性导航、地磁导航等。这些定位技术的定位精度已经提高到米级甚至亚米级,开始迈入消费级市场水平。
虽然上述几种室内定位技术已经能够应用到各行各业中,但是人们为追求更高的定位精度和可靠性,尝试将不同定位技术进行融合,主流的融合方案有两种:1)依赖外置信号源与天然信号源的定位技术融合;2)两种不同的基于外置信号源的定位技术融合。
1.1 超宽带与惯性导航技术的融合
UWB技术是一种无载波通信技术,它的传输速率高,发射功率低且穿透能力较强,但只适用视距传播条件下,当存在障碍物体遮挡信号时,其测距精度将大大降低。
惯性导航技术是利用惯性测量系统(inertial measurement unit, IMU)采集运动数据,并进行处理来获取物体当前时刻的位置信息。惯性导航技术具有一个明显的缺点,即定位误差会随着工作时间的增加而累积。
为克服上述两种定位技术各自的缺点,有学者提出将二者进行融合,开发出环境适应能力强、精度高的室内无线导航技术。其基本原理是利用这两种定位方法单独测量定位数据,然后对两组数据进行融合处理,如图1所示。图1中,TDOA(time difference of arrival)为到达时间差。
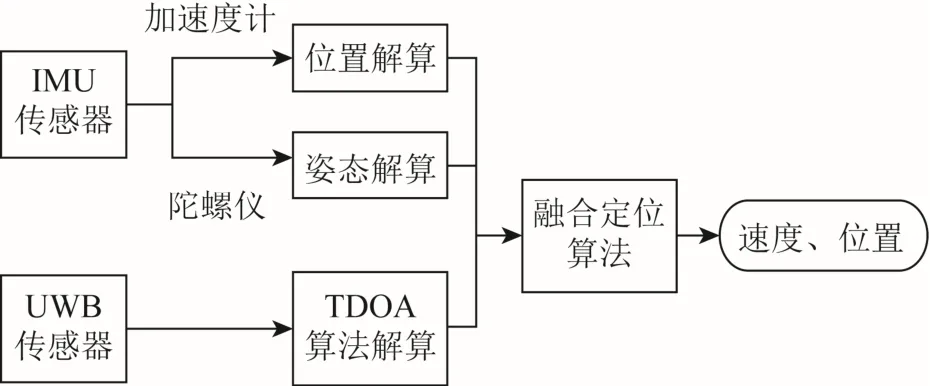
图1 UWB与IMU技术融合工作原理
文献[7]提出了使用无迹卡尔曼滤波(unscented Kalman filter, UKF)算法搭建基于IMU和UWB的融合室内定位系统,工作原理是先对已知的两组样品数据进行无损变换(unscented transformation,UT)、获取近似高斯分布函数,再利用卡尔曼滤波(Kalman filter, KF)算法,得到两组对应的预测数据,最终计算出相应权重并与预测数据融合、得到定位结果。根据实验结果,该系统可以提高定位精度并且能够降低对使用环境的要求。国内学者对此融合算法还有其他相应研究,如文献[8]使用自适应蚁群优化粒子滤波器算法,可实现在只有一个UWB定位节点情况下,将定位数据融合后,能够得到精确的定位结果。
1.2 超声波与射频技术的融合
超声波定位是利用超声波传递信号,采用反射式测距,并通过三角定位等算法来获取定位信息。超声波定位虽然精确度高、抗干扰能力较强,但是定位有效范围小,并且设备成本较高。
射频识别(radio frequency identification, RFID)是利用一组固定的传感器识别移动目标上的标签特征信息,再通过近邻法、多边定位法、接收信号强度等方法确定标签所在位置。该定位方法传输范围大、获取位置信息快,但定位精度低,并且不具备通信功能。
文献[11]提出一种超声波与射频技术融合使用的定位方法,这种融合方案将整个定位过程分为两步:1)利用 RFID获取定位目标所在区域,同时移动目标给区域内所有定位基点发射射频同步信号和超声波;2)定位基点根据接收到射频同步信号与超声波的时间差计算出定位数据,通过减少精确测距过程中超声波信号的损耗,从而降低了定位误差,达到提升定位精度的效果。这种融合技术只是简单地组合使用两种定位技术,无需设计融合算法,相较于单独使用两种技术,能够实现大范围的精确定位,并且通用性好,能耗低。
1.3 WiFi与惯性导航技术的融合
WiFi定位是利用WiFi信号来实现定位的,需要在目标场景布置基站,通过测距交汇法或指纹匹配法得到目标定位信息。该定位方式传输效率高、成本低,但覆盖半径小且易受其他信号干扰。
基于WiFi定位的优势,即可以得到目标的绝对位置,利用这些数据来校正惯性导航定位算法的累积误差,实现高精度、稳定的室内导航。使用无迹卡尔曼滤波算法可实现两种非线性数据融合,获取误差较小的融合定位数据,工作原理如图2所示。通过对实验结果的分析,融合技术方案能够有效降低定位误差,达到提高定位精度的目的。
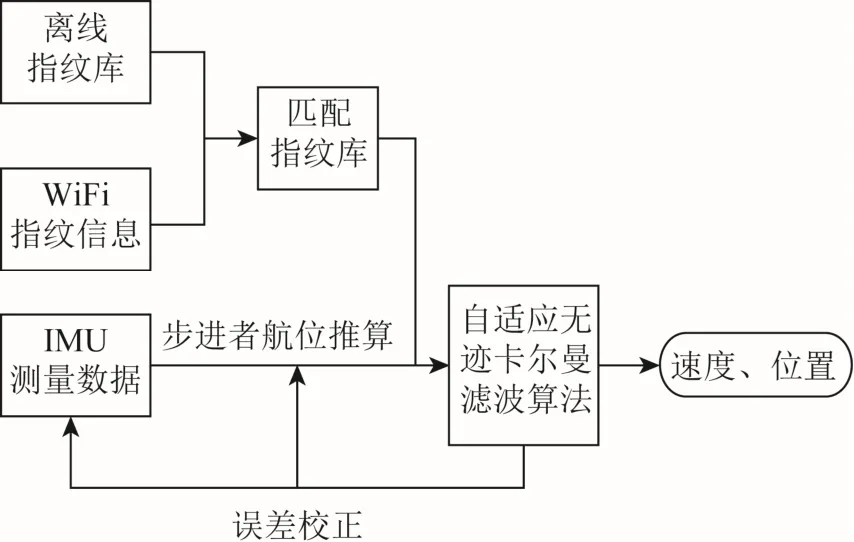
图2 WiFi与IMU技术融合工作原理
1.4 WiFi与蓝牙技术的融合
蓝牙定位与WiFi定位原理相似,主要区别是使用定位信号不同,蓝牙定位是使用的是2.4~2.485 GHz的工业科学医学(industrial scientific medical, IMS)频段的超高频(ultra-high frequency, UHF)无线电波,它的覆盖范围为10~100 m,范围较小,但是传输速度较快,可达2 Mbit/s。同时还具有功耗低、运用范围广等特点。
为解决WiFi与蓝牙室内定位易受干扰且信号波动较大的问题,文献[16]提出一种基于WiFi与蓝牙融合的误差区域加权定位算法,该算法首先在离线阶段,建立WiFi和蓝牙多边定位模型,计算相应加权系数并融合两组定位坐标。同时利用移动最小二乘法获取误差拟合函数,对融合误差进行误差分析,将融合误差与前面得到的融合位置结合,得到最终估计值,工作原理如图3所示。
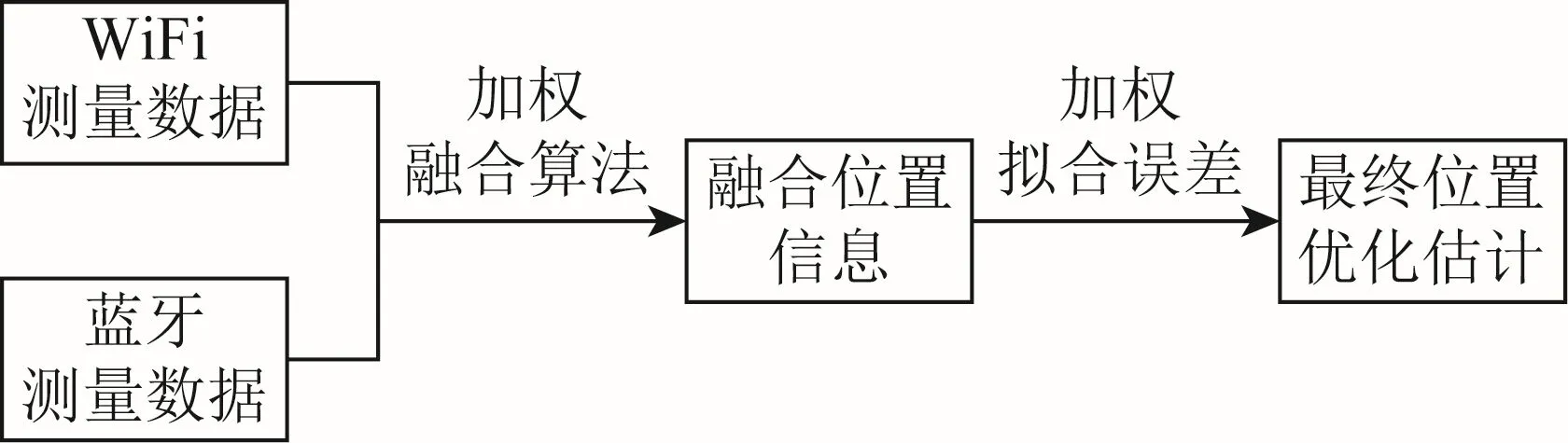
图3 WiFi与蓝牙技术融合工作原理
通过实验数据对比,该方案将两种技术获得的多边测量模型简化成获取二维定位可取区域,再通过加权融合得到融合定位信息,能够有效地提高定位精度;通过定位误差模型获取的加权拟合误差来分析融合数据,减少了多径效应和信号波动的影响,提升了定位方案的抗干扰性。
2 应用进展
在一些日常生活中的简单场景中,使用单一的室内无线定位技术已经能够满足人们对定位的需求,但在复杂环境中就无法实现精确定位,而多技术融合的室内无线定位技术能解决这一难题,无论是在覆盖范围、定位精度和抗干扰性等性能上,都有较大的提升,使其能够应用到人类的社会生活中。
2.1 个人服务
在复杂多变室内环境中,人员流动性大、无线信号干扰严重,需要根据实际情况设计定位解决方案,实现精准定位。如在医院对医生和患者进行定位,文献[18]提出一种基于无线电波和地磁指纹技术结合的混合定位技术,将医院人员和物品位置信息可视化,达到提高医生工作效率和预防突发事件的目的。文献[19]使用一种基于WiFi与惯性导航融合的定位方法,提高矿井下人员定位的精度和稳定性,为应对危险情况提供了稳定的定位信息保障。文献[20]设计了一套基于RFID的室内无线定位系统,实现了视频监控、报警、无线定位、门禁、对讲、会见、外来车辆管理、监狱信息管理等子系统的无缝衔接和统一管理。
除了上述的举例外,复杂的室内环境还有许多,比如国际会议会场、室内厂房、地下空间和购物中心等室内环境。而室内定位不仅仅服务于个人需求,也可以应用到其他运动载体,这些技术的应用最终目的都是为人们提供更好位置信息服务。
2.2 自动化工厂
工业4.0以来,企业为了实现工厂的全自动化管理,对内部设备工作状况、移动设备的运动轨迹进行实时监控和管理,这就需要首先获取工厂内工作人员、移动机器人以及大型设备定位信息,根据不同工厂设计多技术融合的室内无线定位解决方案,保障定位信息的准确性和稳定性,再通过监控设备对物体进行实时监控,将数据上传到终端进行处理,实现工厂的自动化管理。
2.3 物联网
物联网平台是一个可以将范围内所有物品与互联网连接起来,实现智能化识别和管理的平台。室内无线定位技术可以为物联网提供定位服务,但物联网定位服务没有一个绝对的解决方案,必须根据应用目标、环境条件和系统参数来设计定位方案。多技术融合的无线定位技术,可以获取定位误差最小的用户位置,即结合多种类型技术的优势,克服彼此缺点。
3 多技术融合的室内无线定位方法发展趋势
由上文综述可知,外置信号源的定位方法容易受到环境和多径效应的干扰,而天然信号源的定位方法不受环境影响,但定位误差会随时间积累,所以主流的室内无线定位方案会根据环境需求,使用两种及两种以上的定位技术组合来以获取精准的位置信息,其融合发展趋势主要包括以下三个方面。
3.1 新的室内无线定位技术与现有技术融合
目前已有的室内无线定位技术各自存在难以克服的局限性,国内外学者开始探索新的室内无线定位技术,主要集中在机械视觉、发光二极管(light emitting diode, LED)、音频和第5代移动网络通信技术(the fifth generation of mobile network communication technology, 5G)等方面,这些技术除机械视觉外,都需要外置信号源。机械视觉是利用摄像头检测周围物体特征,与数据库对比来计算定位信息,定位精度可达到厘米级。LED是在固定光源上加载一个特殊信号,传感器接收到光信号,解析出特殊信号和其对应的位置,还可以通过算法完成定位,定位精度可达厘米级。音频定位与超声波定位原理相似,测量声音从音频发生器到接收器距离来定位,但声波传播较慢,存在延迟。5G定位是近两年出现的新技术,它是利用 5G信号来实现定位的,5G相对于以往的第二代移动通信系统(the second-generation mobile system, 2G)、第三代移动通信系统(the thirdgeneration mobile system, 3G)及第四代移动通信系统(the fourth-generation mobile system, 4G)在技术上有很大提升,能够实现更准确的定位,定位精度在1 m以内,而且5G信号相对于其他信号更为可靠。但这些新技术的研究还不够成熟,需要突破许多技术壁垒,才能满足定位需求,再根据实际需求与现有定位技术组合使用,才能够解决工程实际问题。
3.2 高效多源信息融合方案
在选取具有互补特性的不同定位技术的基础上,还需要设计能够让数据高效融合的方案来提高定位精度,融合方案的设计包括两个方面:
1)不同技术的融合方式。目前采用的紧耦合方式来融合不同信号源,是业界认可的融合方式,这是数据融合方案的设计基础。
2)融合定位算法的设计。不同定位技术融合大多都需要将它们各自的定位数据,利用滤波算法进行融合,从而得到最优的位置估计。拓展卡尔曼滤波算法和无迹卡尔曼滤波算法是目前使用较多的算法,还有一些是近几年开发的新型融合定位算法,如粒子算法,也可以完成数据融合、实现定位技术的组合运用。
3.3 使用额外设备辅助定位
在室内环境中,使用室内定位技术较多的是智能手机,智能手机的定位技术主要依赖于 GNSS,该技术在室外能够提供精准定位,但是在室内会受环境影响,出现较大误差。为提高室内定位精度,通过使用蓝牙信标作为额外辅助设备,可实现智能手机水平定位精度优于0.7 m,高程定位精度优于0.2 m。而除了智能手机外,其他终端定位也可以使用额外设备辅助来提高定位精度。在“2018年室内定位导航比测”活动中,国内团队采用“UWB+IMU+气压计”方案,获得了水平定位精度达0.2 m、高程定位精度达0.1 m这样的高精度。
4 结束语
为解决在室内环境中,单独使用某种室内定位技术不能满足人们对定位精确性,信号抗干扰性、覆盖范围、功耗、穿透性以及部署设备复杂程度的问题。人们将多种室内定位技术进行组合使用、使其优势融合,这些研究成果已经应用到了各行各业中。本文通过对几种主流室内定位技术融合方案的关键性问题进行分析,其结果表明,目前多技术融合的室内无线定位方案还可以进一步优化,新的定位技术的研发,也为人们提供了可供使用的室内组合方案,这也是室内定位技术未来主要发展方向之一。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
工业设计(2022年7期)2022-08-12
计算机与网络(2019年23期)2019-09-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
发明与创新·大科技(2017年9期)2017-09-14
中学生数理化·七年级数学人教版(2016年6期)2016-05-14