自循迹智能小车控制系统的设计与实现
2022-06-11 17:11毛祖光杨洁
科技风 2022年14期
毛祖光 杨洁


摘 要:自循迹智能小车属于高新技术产品,将环境感知技术、采集规划技术、判断决策技术集中到一起的综合载体,在无人的情况下完成制定任务。本文阐述了智能小车控制系统主要设计内容、智能小车整体设计方案,并针对控制系统在直行、左转弯、右转弯阶段,硬件和软件设计进行了探讨。
关键词:自循迹;智能小车;控制系统;设计
自循迹智能小车研究和设计过程中,融合人工智能技术、机器视觉技术、传感技术、自动化技术等,这也是智能小车的主要优势。小车在使用的过程中,是通过设定模式进行运行,小车按照设定路线行驶,通过传感器自动判断路径,自主完成全部过程。自循迹智能小车具备自动躲避障碍、实时采集数据以及远程传输的作用。智能小车行驶系统设计中,速度控制系统好坏直接关系这小车行驶的安全性。因此,进行智能小车控制系统研究可以为智能小车的发展和应用带来一定的思考。
1 智能小车整体设计方案
循迹智能小车系统主要包括供电电源、稳压电源模块、电动机驱动模块、单片机、循迹传感器等部分。智能系统整体设计结构如图1所示可知,智能系统在采集两路信号以后,也会输出这种信号,其中传感器装置具有导航系统的作用,速度检测装置及无线调控装置可以作为电机获取反馈信息的控制系統。输出信号促使小车后轮电机驱动,由单片机输出PWM调制信号控制后面两个轮子的转速,从而达到控制转向的目的,前轮是万向轮,起支撑作用,进而实现小车智能化行驶目的。为此,促使智能化系统运行的关键点在于传感器,传感器装置获取小车前方的道路通行信号以后,通过智能化系统对运动轨迹、速度等进行控制,实现智能化控制目标。单片机是智能化系统中最小的组成部门,系统电源电路、传感器驱动电路、电机驱动电路均在一块PCB板上,此板作为系统的主电路。激光传感器装置位于车辆上方位置,其中接收电路与激光发射装置安装在另一个PCB板上,作为传感器电路,另外,配置键盘液晶人机交换模块,起到参数设定的作用。
根据上述方案可知,小车智能化系统功能模块可以划分为传感器模块、电机模块、MCU最小系统、电源模块、速度检测模块、无线调试六大模块。为了保证自循迹智能小车在轨道上正常运行,需要微控制器时刻接收数据信息,并对此进行快速的分析及判断,在此基础上通过控制算法快速对驱动系统发出指令,以此,实现转向或直行的目的,进而保证小车在行驶的过程中不会出现由于反应不及时而发生失误,为小车稳定运行提供安全保障。
2 硬件设计
2.1 主要电路设计
小车智能化系统主要电路设计包括主电路设计、显示电路设计、调速电路设计。主控制芯片选择STC89C52单片机,此单片机运用了CMOS 8位微控制器,40引脚双列直插封装方式,具有低功率、高性能、在线编辑的优势。其工作电压一般在3.3~5.5V范围内,其运作频率最高可以到达35MHz,是性价比较高的一种良好方案。主电路板中是由晶振电路及复位电路两种电路组成,按键电路主要被用来调整速度,而显示电路主要作用是对小车行驶情况进行实时显示,如图2所示。
2.2 电机电路设计
在自动控制系统中电动机的作用尤为重要,电动机性能对小车运行具有直接性的影响。小车在运行过程中,为了保证其安全性和行驶速度,必然需要有入弯道减速和出弯道加速的过程,并且这是一个频繁加速的过程,为此,电机驱动芯片应当具备内阻小、性能稳定度高、操作简单的特点,通常情况下会选择以下两种方案,一种是通过专用芯片来进行电机驱动;另一种是采用分离元件进行组合的方式实现驱动电路设计。本文采用第一种方案,是由于该方案具有较高的可靠性,采用PWM调速,通过L298N驱动装置来对直流电动机进行驱动,通过控制单片机I/O口输出高低电平控制电机的正反转,L298N的OUT1、OUT2和OUT3、OUT4分别接两个电动机。当ENA高电平时,IN1(IN2)、IN3(IN4)中有一方为高电平即可旋转或制动,另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。如图3所示是直流电动机驱动示意图,由图可知,8个整流二极管功能是用来解决由负载电感而存在的反峰问题,进而起到保护IC的作用。
2.3 光电编码器电路设计
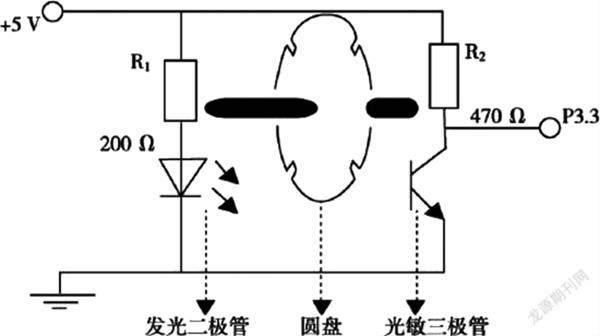
为了能够时刻观察小车的运行情况,对小车行驶路程和速度进行观察,这整个系统中,速度采集电路起到至关重要的作用。运用光电测速,是在电机轴上固定一个圆盘,并且圆盘的边缘进行等分凹槽处理,如图4所示,在圆盘上固定一个二极管,并且二极管的位置应当对准凹槽,二极管会通过缝隙照进来的光线生成信号,并将信号传给光敏三极管,这时三极管就会处于导通状态,二极管若未产生信号传递给三极管,三极管便会处于截止状态,其工作电路图如图4所示,由图可知,电动机每转一圈,单片机端随即产生一个低电平。为此,速度采集器具有以下优势,通过捕捉单片机端脉冲信号来实现电机转动速度以及路程的计算,进而对电机运行进行控制。
3 软件设计
3.1 软件总体设计
自循迹小车设计中,控制策略是最主要的设计内容,自循迹小车设计需要满足一定的行驶速度,但也要保证其安全性,人们希望小车行驶越快越好,但是在行驶过程中遇到弯道若是不减速便会冲出弯道,造成安全事故。因此,对小车行驶进行控制很有必要,在设计中加入了速度控制系统,这就需要传感器具备较高的性能,在遇到弯道的时候促使小车减速,在上坡的时候让小车加速,等等,自循迹小车主要是利用激光发射机来实现信息传播,通过激光发射器发射和接收信号,以此来对小车轨迹进行检测,为小车行驶的安全性提供基础保障。
自循迹小车在行驶的过程中,经常会遇到直行、左转弯、右转弯等过程,系统会进行自动判别吗?详细来说,检测时当系统黑线处于小车正中间位置,小车则继续前行,同时控制电机提速。但是当检测黑线在位于小车左侧或者右侧的时候,就需要小车向左或者向右转弯,这时就需要控制小车减速完成转弯工作,并且需要小车根据反馈阶段控制小车速度稳定,控制电机使其降速,小车行驶速度越快,其下降速度就越快。起初程序会对系统进行初始化,需将小车的前后左右四个动作分别置于四个函数中以方便调用,同时将不同的模式固定在相应的定时器中。将定时器1设计成计数模式,使其捕捉脉冲信号,将定时器0设计成定时模式,将传感器测定时设置成1秒作为一个周期来处理数据,再通过定时器2产生PWM对小车形式速度进行调节。在对三个传感器信息进行采集,明确黑白线的位置以后,小车便可以沿着黑线信息继续前进,总体流程图如图5所示。6588E762-95A6-490F-8E00-665C647C93CE
3.2 系统速度控制程度设计
根据实际驾驶经验可知,车辆在行驶弯道和直行阶段其速度控制相反,智能化系统小车设计应当满足这个需求,为此,就需要对智能化系统设计控制速度的功能,实现对小车速度的控制,相对于简单的方式是对电机进行控制,当小车处于弯道时,便会存在一个弯道阻力,这个阻力自然减慢行驶速度。当小车驶出弯道时,其阻力就会变小,促使小车加速,然而这种开环控制方法很容易出现入弯减速、出弯道加速不及时的问题。针对这种情况,采用增加位置式的速度控制器方式来解决这个问题。系统中对电机速度检查方式采用电编码盘方式,是由光电传感器和编码盘相结合的方式组成的检测设备,其计算公式如下:
其中N表示凹槽数量,n表示额脉冲数,t表示时间,V表示转动速度,光电编码器边缘凹槽数量与其具有较大的联系,可知凹槽对电机转动速度会产生影响,导致误差问题出现。为了降低误差率,可以采用提高凹槽的数量方式减少误差,选用凹槽数量为20,采集数据的时间设定位1秒,进而得出转动速度过程,如图6所示是测度流程示意图。定时器1设置成统计数据模式,得到脉冲数为n,定时器0设计成计时模式,当处于1秒时,系统将会对得到的脉冲数进行处理,以后将数值进行计算,以此得到小车形式的速度和路程。
3.3 小车智能循迹算法
循迹指的是小车根据黑线指示条行驶,但是由于黑线、白板反射光线的系数存在一定差异,可以按照反射光线的强弱程度对“道路”进行判断,一般采用红外探测方法进行判断。红外探测法是充分利用了红外线特殊性质,红外线对不同颜色反射出的性质也不相同,小车在行驶的过程中,持续向地面发射紅外线,当红外线与白板碰撞时会反射回来信号,由小车接收模块对反射信号进行接收,如果发射的红外线遇到黑线,红外光就会被吸收,这样小车就无法获取反射的信息,此时单片机就会做出相应的反应,根据是否接收到反射信号来判断黑线的位置,以此确定小车行走路线。本文利用三个传感器开展小车黑线、白板的循迹工作,当三个传感检测结果同时为黑线时,小车便会停止行驶;如果三个传感器都没有检测到黑线或者是中间传感器检测到黑线,那么小车继续直行;同理,在其他两个传感器没检测到黑线的基础上,左边的传感器检测到黑线则小车向左转,右侧检测到黑线小车右转,其逻辑如下表所示。
4 小车行驶调试
自循迹小车行驶调试流程和内容包括以下几点:首先,需要检测和调试的就是系统各个模块机械性能,检测各个环节设备之间的连接是否正常,特别注意接插部位的安装是否正确、可靠。其次,通电检测,观察各个环节供电是否正常,重点检测电机部位,观察其驱动电流和电压是否存在异常。然后,程序调试,调试系统中各项代码是否正常运作,各个模块运行能否正常运行,检查自检调试程序。最后,整机调试,目的是为了调整各模块参数符合需求,这个过程首要验证的就是激光扫描函数,之后键盘液晶显示程序、弯道策略程序调试,并选择合适的参数,基于此对小车速度程序进行调试,进一步调整优化参数,进而保证小车速度的稳定性。在此基础上对系统进行完善和优化,以此完成自循迹小车速度控制设计。自循迹小车测试过程中存在着无法沿着黑线行驶的问题,导致小车测试过程中跑出设计路线,导致这些问题存在的因素有以下几点:(1)3个红外传感器安装距离缺乏合理性,促使小车行驶过程中红外探测滞后、不灵敏。(2)系统程序设计缺乏科学性,应当技术优化。(3)检测装置不够灵敏,小车速度过快,导致系统不能够及时做出判断。
综上所述,自循迹小车智能系统多个模块组成整体构架,其控制系统也是由多个模块共同组成。自循迹小车控制速度系统受到多方面的影响,通过从硬件设计、软件设计方面上着手,不断改进优化小车各个功能模块的性能,促使小车循迹功能更加稳定、可靠,进而实现智能小车循迹控制系统的目标。
参考文献:
[1]郑茂江.浅谈循迹智能小车设计与应用[J].山东工业技术,2019(01):6.
[2]谢智阳,谭勇.4轮循迹小车过弯性能优化研究[J].汽车电器,2020(07).
[3]胡徐胜,刘娟.一种带多路选择的智能循迹小车优化设计[J].控制工程,2020(07).
[4]李盛林,黄昊晶,唐建清.基于单片机及红外光电传感器的循迹小车设计[J].电子制作,2020(19).
作者简介:毛祖光(2000— ),男,汉族,河北任丘人,在读本科,研究方向:机械电子工程(中外合作);杨洁(1973— ),女,汉族,河南光山人,博士,副教授,研究方向:自动化控制与检测、计算机视觉、模式识别。6588E762-95A6-490F-8E00-665C647C93CE
猜你喜欢
中国品牌(2020年11期)2020-12-23
Coco薇(2017年5期)2017-06-05
电子技术与软件工程(2016年22期)2016-12-26
科技创新与应用(2016年34期)2016-12-23
科教导刊·电子版(2016年26期)2016-11-21
科教导刊(2016年27期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
Coco薇(2015年12期)2015-12-10
舒适广告(2008年9期)2008-09-22