基于马路机器人的潮汐车道运行效果仿真研究
——以苏州东太湖大道庞金路口为例
2022-06-12 05:22汤家镇张丽岩
物流科技 2022年6期
马 健,汤家镇,张丽岩,张 敏,文 媛
(苏州科技大学 土木工程学院,江苏 苏州 215011)
0 引言
国家城市化发展迅速,涌现出一批新一线城市。鉴于目前国内新一线城市中产业集群现象以及由于核心产业集群所导致的区域房价居高不下现象,核心产业区的住职比日渐下降。大多务工人员处于居住在核心产业区外围,而早高峰通勤前往核心产业区工作的状态,此通勤车流也就导致了城市交通流的“潮汐现象”。新一线城市通勤交通流引发的潮汐现象已属普遍现象,道路资源的不匹配现状突出,道路拥堵问题严重。根据需求重新配置道路资源,为重交通流方向的道路提供额外的通行能力,从而达到道路资源的最优化配置,缓解重交通流方向的交通拥堵现象。
目前,国内外专家针对局部交通网路和交叉口潮汐车道的设置以及优化方法进行了广泛而深入的研究。陈婷婷、贾顺平为缓解早、晚高峰时期交通不平衡现象造成的交通拥堵和道路资源浪费,从网络的角度出发,构建双层规划模型来缓解路段交通流不平衡;文建斌等人从交通诱导角度出发,将交通诱导和实施潮汐车道控制相结合,避免设置潮汐车道导致的空间资源错位带来的负面影响。魏庆琦、肖伟等人从不同时间段出行需求动态调整角度出发,基于累积前景理论和退化路网来优化潮汐车道。Kotagi等在城市中未划分车道的交通网络中设置可变车道,并利用微观仿真模型来评估可变车道的实施效果;为了评估设置左转可变车道对交叉口运行性能的影响,Wu等设计了分析通行能力模型和延误模型,提出了感应式信号控制策略来提高实施左转可变车道的信号交叉口的运行能力。
目前国内外研究多局限在现状交通网络的研究,缺乏远景年交通网络潮汐车道效用的研究。在既有研究的基础上,搭建基于TransCAD的宏观需求预测模型和基于VISSIM的微观仿真模型,通过两种模型的结合,从而实现对目前新一线城市由于潮汐现象而引发的各种交通问题的更优化的解决。
1 潮汐车道设置的必要性、可行性、可持续性三维分析
1.1 潮汐车道设置的必要性
东太湖大道作为吴江区主干道,承载着吴江东西方向大量前往园区的通勤需求,建设为双向6车道,部分交叉口展宽为双向9车道,可谓是一条豪华道路。但是,由于潮汐现象的影响,导致东太湖大道道路资源分配不合理,运东大道和庞金路交叉口经常溢出,成为了亟待解决的群众出行难题。
对苏州东太湖大道—庞金路口进行现状航拍。

图1 苏州东太湖大道—庞金路口区位图

图2 苏州东太湖大道—庞金路口早高峰航拍图
从现场航拍情况可以明显看出,由于苏州吴江区的大量通勤车辆早高峰需前往苏州工业园区,从而导致东太湖大道—庞金路西进口出现明显的排队过长以及延误问题。而与之相对的晚高峰,由于大量通勤车辆需要从园区驶出,从而导致东进口也会出现相应的交通问题,这也就是典型的新一线城市产业集群地带出现的潮汐现象。
对东太湖大道路段进行数据的清洗、筛选,再使用方向不均匀系数K进行量化,其计算公式如下:

式(1)中:K为Q的方向不均匀系数;Q为道路某一方向横断main车流量;Q为道路另一方向段main车流量。
早晚高峰时段该路段的潮汐特性分析如表1所示,苏州吴江区前往园区的通勤车流在东太湖大道路段具有明显的潮汐性,重交通方向的通勤车流与重方向道路所能提供的通行能力不匹配,出现重交通方向道路通行能力无法满足早高峰的通勤车流需求,而轻交通方向道路通行能力明显浪费的现象。

表1 早高峰(7:30~9:00)东太湖大道路段潮汐特性分析
1.2 潮汐车道设置的可行性
1.2.1 车道条件。东太湖大道—庞金路西进口原为左转1车道、直行2车道和右车1车道,机非分离,满足潮汐车道设置要求中的车道数要求。现状道路横断面如图3所示,潮汐车道交通组织方案设计的道路横断面如图4所示。
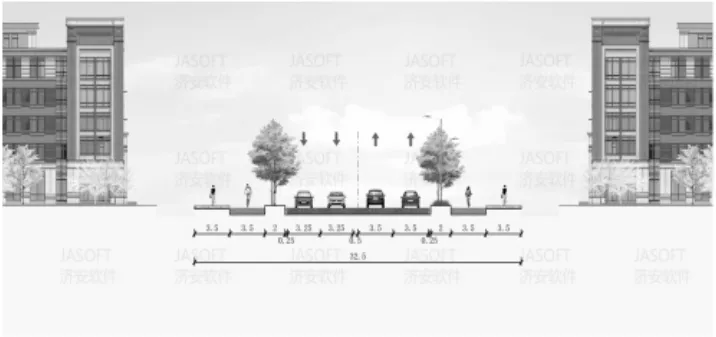
图3 原有车道布置情况
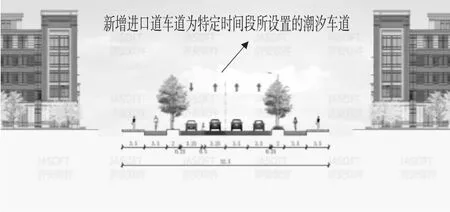
图4 重新划分车道后布置情况
1.2.2 流向条件。根据表1,重交通流的方向不均匀系数大于三分之二,满足流向条件。
1.2.3 通行能力条件。根据潮汐车道交通组织设计方案所设计的道路横断面图以及表1中早高峰轻交通方向的交通量数据所示,重交通流方向使用潮汐车道的同时轻交通方向交通流也满足。
1.2.4 道路条件。道路上不存在不可移动的隔离设施且对向车道之间无中央分隔带或路面电车轨道等,可进行潮汐车道的设置。
1.3 潮汐车道设置的可持续性
在传统的必要性和可行性研究的前提上,本项目增加了潮汐车道可持续性发展研究。基于TransCAD宏观仿真软件构建该路段的交通需求预测模型,来进行墅浦路远景年道路潮汐特性分析。
在假定目标路段交通不均匀系数和交通量分配系数不变的情况下,根据基准年份的全方式居民出行矩阵和目标年份的出行产生和吸引量,采用增长系数法预测目标年份和居民出行分布矩阵,运用TransCAD软件得到远景年出行的期望图。根据各交通小区的生成量量化目标路段上远景年重交通量,其计算公式如下:

式(2)中:T为路网中某路段的远景年交通量预测值;(∑OD+OD+OD+…)为路网中各交通小区远景年累计交通量预测值;β为现状路段交通量分配系数(现状路段早高峰路段交通量/周边交通小区总交通生成量);γ为现状路段重交通方向不均匀系数。

表2 吴江区2021~2027年吴江东太湖大道路段交通流量预测汇总
在保证东太湖大道能提供轻交通方向交通流所需要的通行能力的基础上,考量东太湖大道重交通方向所能承受的最大通行车流。通过观察东太湖大道远景年交通流量期望图,2025~2026年东太湖大道所设置的潮汐车道也将无法满足高峰时段的通勤车流,此时潮汐车道的可持续性被破坏。
2 基于马路机器人的潮汐车道设计方案
2.1 马路机器人介绍
标准款马路机器人外形尺寸:38*40*98。
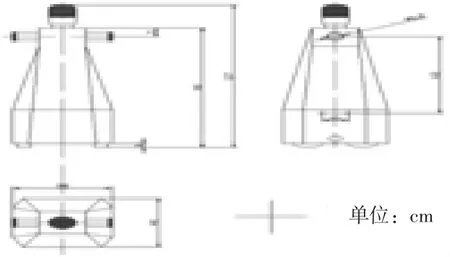
图5 马路机器人外形图
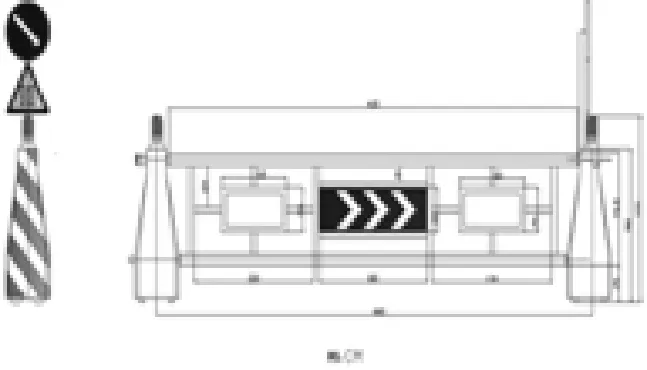
图6 产品组合图
在原先道路条件下,基于马路机器人的潮汐车道无需增设中央分隔栏来保障道路安全,且马路机器人自带太阳能板,节能环保。
2.2 机器人安全保障
机器人通过运行过程中的声光警告、机器人及护栏本身反光膜警示、端头机器人的爆闪警示及标牌指引、受撞击后的自动全线停止以及机器人与护栏的柔性高强度联接(每条线为一整体,保证不会二次伤害)。
2.3 马路机器人的应用
相对于传统的划线、手动拉链移动隔离墩等方式,马路机器人可通过实时的数据接受进行智能化的自动车道规划,更为灵活、安全以及智能化。

图7 东太湖大道机器人工作状态

图8 东太湖大道标线改造
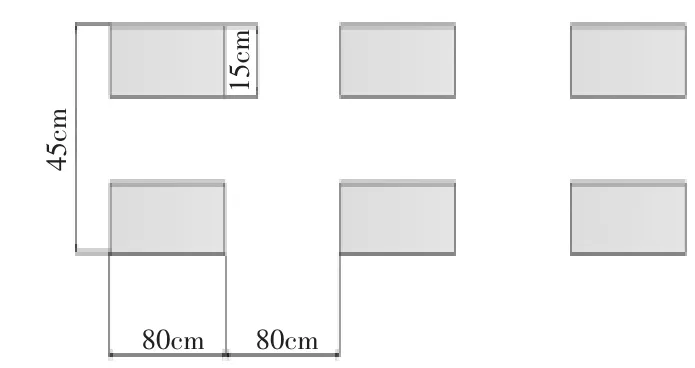
图9 潮汐车道标线详图

图10 基于马路机器人的潮汐车道现场运行图
3 基于VISSIM的量化分析
3.1 量化分析指标设定
服务水平—对于城市道路来说,衡量交通服务水平的最主要指标为路段的饱和度(v/c即是:路段实际交通量/设计通行能力)。
平均排队长度—一个交叉口信号周期下,某一交通方向等待通行的车辆的平均长度。
通行延误时间—5分钟粒度下,某一通道车辆实际行程时间与自由流行程时间之差的均值。
3.2 搭建墅浦路周边路网微观模型,观察路网关键节点的参数变化
利用PTV-VISSIM搭建主要路口、重要节点、交叉口、主次干道连接线的中微观模型,将实时仿真平台生成的路段和交叉口交通状况参数反馈至指挥系统,并作为参考指标,深度解析潮汐车道设置前后的道路交通状况的差异化。
3.3 搭建可视化展示平台,直观呈现仿真结果
建立关键路段周边路网的微观仿真模型,将其与精度达5cm的三维航拍地图相关联,建立墅浦路周边路网的交通仿真可视化展示平台。平台能灵活切换仿真路网现状以及潮汐车道设置方案的预演,以仿真模型的动态演示与可视化图表直观清晰地呈现交通仿真结果与结论,实现对路网中关键路段的服务水平、排队长度、通行延误时间等时变化参数的动态观察与分析。
3.4 仿真验证
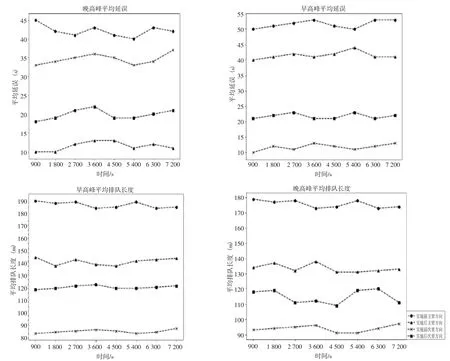
图11 仿真结果效果比较图
仿真数据如表3所示,东太湖大道在设置潮汐车道后,早晚高峰的通行能力得到一定程度上的提高,延误水平也得到有效缓解。与此同时,平均排队长度大幅度下降,新方案优化后的墅浦路在现有信号配时方案管控下,可以基本释放掉早晚高峰路段内的排队车辆。虽然轻交通方向的通行能力下降,延误时间以及平均排队长度都会有所增长,但是仍满足基本通行需求,使得墅浦路在早高峰时间段的道路资源分配更加的合理,也为道路使用者争取到了最大的利益。

表3 仿真分析结果统计表
4 结束语
实施潮汐车道控制是解决道路交通潮汐现象的有效方法,并从必要性、可行性、可持续性三个维度对潮汐车道的设置进行论证研究,增强其理论支撑。
仿真数据显著的展示了马路机器人与潮汐车道的高效结合,使得车道更加的智能化,成效也更加的显著。因此在解决现今新一线城市面临的道路潮汐拥堵问题,基于马路机器人的潮汐车道相比其他方式更加智能化,并且其经济性更高。另外,数字化交通是“十四五”规划重点,进一步将车道与数字化科技的结合,需要政府加快构建数字化交通控制系统做到实时道路数据的分析与反馈。
猜你喜欢
心声歌刊(2022年5期)2022-12-18
凤凰动漫(军事大王)(2022年9期)2022-11-05
文史春秋(2022年3期)2022-06-15
心声歌刊(2022年3期)2022-06-06
VOGUE服饰与美容(2019年6期)2019-07-17
活力(2019年22期)2019-03-16
玩具世界(2017年4期)2017-07-21
电子制作(2017年9期)2017-04-17
宝藏(2017年2期)2017-03-20
生活用纸(2016年6期)2017-01-19