轮毂电机驱动电动汽车行驶平顺性研究
2022-06-15 15:52刘连明
现代信息科技 2022年2期



摘 要:为研究轮毂电机对车辆平顺性的影响,文章建立了1/4车辆二自由度振动系统模型和随机路面输入模型,以MATLAB/Simulink为仿真平台建立了相应仿真模型,通过仿真得到了不同非簧载质量情况下车身加速度、车轮相对动载荷以及悬架动挠度对路面速度激励的响应。最后,分别从频域和时域角度对振动系统响应进行分析,结果表明,随着非簧载质量的增加,车辆的平顺性变差。
关键词:轮毂电机;非簧载质量;平顺性
中图分类号:TP391.9;U469.72 文献标识码:A文章编号:2096-4706(2022)02-0056-04
Abstract: In order to study the influence of hub motor on vehicle ride comfort, the 1/4 vehicle two degree of freedom vibration system model and random road input model are established. Taking MATLAB/Simulink as the simulation platform, the corresponding simulation model is established. Through the simulation, the responses of vehicle body acceleration, wheel relative dynamic load and suspension dynamic deflection to road speed excitation under different unsprung masses are obtained. Finally, the response of the vibration system is analyzed from frequency domain and time domain respectively. The results show that the vehicle ride comfort becomes worse with the increase of unsprung mass.
Keywords: hub motor; unsprung mass; driving comfort
0 引 言
随着车辆保有量的不断增加以及能源危机和大气污染问题的日益突显,研发环保型新能源汽车已经成为缓解能源短缺和大气污染的必要途径。轮毂电机驱动电动汽车具有传输效率高、布局合理、空间利用率高等优点,具有良好的市场前景,然而,由于轮毂电机安置于车辆轮毂之中,这将增加车辆的非簧载质量,使得整车的行驶平顺性和乘坐舒适性变差[1]。针对轮毂电机车辆的行驶平顺性问题,很多学者从进行了相应的研究,韩以伦以一种定子悬置的新型轮毂电机电动轮为研究对象,建立考虑吸振器效应的1/4车辆垂向动力学模型,研究定子质量转移构型对电动轮垂向振动特性及整车平顺性响应的影响[2]。靳立强对比分析了集中驱动与轮毂电机驱动的电动汽车在不同路面激励和相同路面激励情况下的车辆的垂直振动响应变化。结果表明,轮毂电机的引入对车辆的车身加速度和轮胎相对动载荷两个平顺评价指标均产生明显的影响[3]。万松采用常用的1/4车辆振动系统模型,研究了簧载质量与非簧载质量之比悬架阻尼系数与轮胎阻尼系数之比对轮毂电机驱动车辆平顺性的影响[4]。本文通过比较在不同簧下质量的情况下,分别从时域和频域角度分析车身加速度、轮胎动载荷和悬架动挠度这三个车辆平顺性评价指标的响应变化情况,以分析轮毂电机的引入对各个平顺性评价指标的影响程度。
1 模型的建立
1.1 振动系统模型
在车辆平顺性分析时,应用最为广泛且简单实用,能综合反应振动系统特性的模型是1/4二自由度振动模型[5]。本文主要研究由于轮毂电机的加入引起的簧下质量增加对整车平顺性的影响,因此选择的系统模型为常用的1/4二自由度车辆振动系统模型,图1为本文所建立的车辆二自由度1/4车辆振动系统模型。
1.2 路面输入模型
轮毂电机驱动电动汽车行驶时,其主要输入激励来自路面的不平度,在进行车辆的平顺性分析时,应该首先研究路面输入激励。对于路面输入激励模型的建立有谐波叠加法、滤波白噪声法、和时间序列模型法等很多种方法,其中,滤波白噪声法应用最为广泛[7]。本文采用该方法,依据国家标准GB /T 7031—2005建立的路面输入模型为:
式中:q(t)为路面随机不平度位移;f0为截止频率(f0=0.01),w(t)为高斯白噪声,Gq(n0)为路面不平度系数,v为车辆纵向速度。依据式(3),在Simulink中建立了随机路面输入模型,如图2所示。
2 轮毂电机对平顺性的影响分析
在研究轮毂电机对车辆平顺性的影响时,可采用频域分析法和时域分析法,分别分析随着簧下质量变化,振动系统频域响应特性和时域均方根值的变化情况,来综合反应轮毂电机对汽车平顺性影响。
2.1 频域分析
为了进行振动系统的频域分析,首先应求出各平顺性评价指标对路面速度激励的频率响应函数。由于传递函数和状态空间方程可相互转换,因此可由状态空间方程式(2)可以得到车身加速度、悬架动挠度和车轮相对动载对路面速度输入的传递函数,再令传递函数中的s=jω,即可得出系统各评价指标对应的频率响应函数。
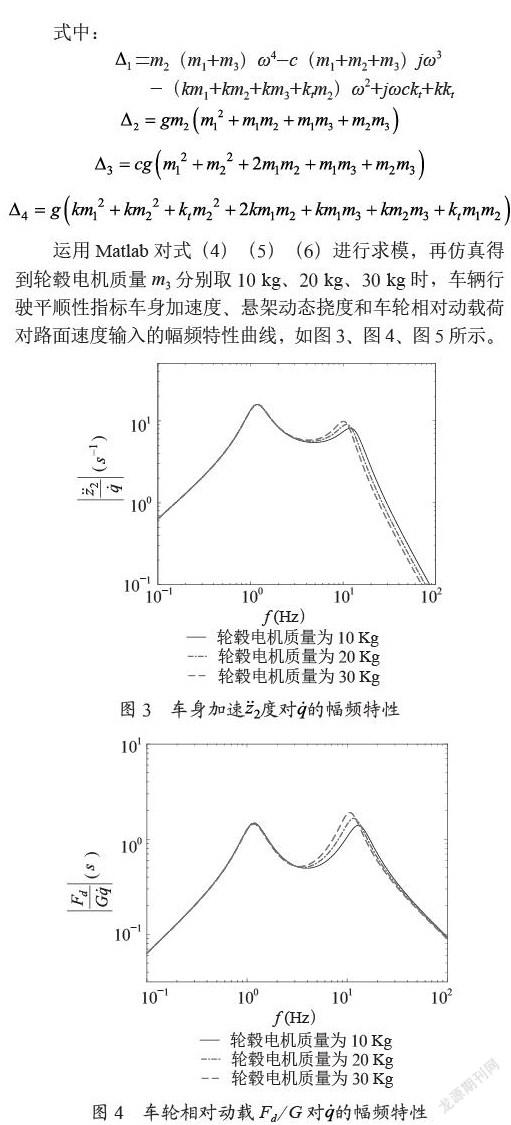
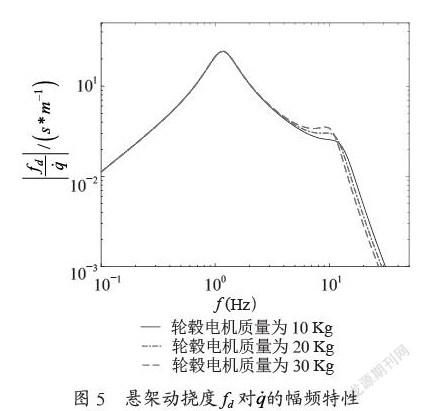
运用Matlab对式(4)(5)(6)进行求模,再仿真得到轮毂电机质量m3分别取10 kg、20 kg、30 kg时,车辆行驶平顺性指标车身加速度、悬架动态挠度和车轮相對动载荷对路面速度输入的幅频特性曲线,如图3、图4、图5所示。
从图3、图4、图5的幅频特性曲线可以看出,系统在车身和车轮的固有频率处出现共振,产生两个峰值。在低频共振区,随着非簧载质量的增加,车轮动载荷、悬架动挠度和车身加速度的幅频特性曲线几乎重合;而在高频共振区,幅频特性曲线存在明显差异。随着非簧载质量的增加,车轮的固有频率降低,振动更早达到高频共振峰值,且高频共振峰的峰值显著增大,达到峰值后衰减更迅速。
图3显示随着非簧载质量增加,车身加速度变大,使得乘坐舒适性变差;从图4可以看出,在高频共振区车辆相对动载显著增大,这就增加了轮胎跳离地面的概率,轮胎的接地性能变坏,使车辆得驱动力和制动力下降,甚至导致行驶方向失去控制,严重影响车辆的操纵稳定性和安全性;而从图5看出,非簧载质量增加,悬架动态挠度的增大,这增加了悬架在车辆振动过程中撞到限位块的概率,造成悬架元件的损坏,也影响乘坐舒适性。
2.2 时域分析
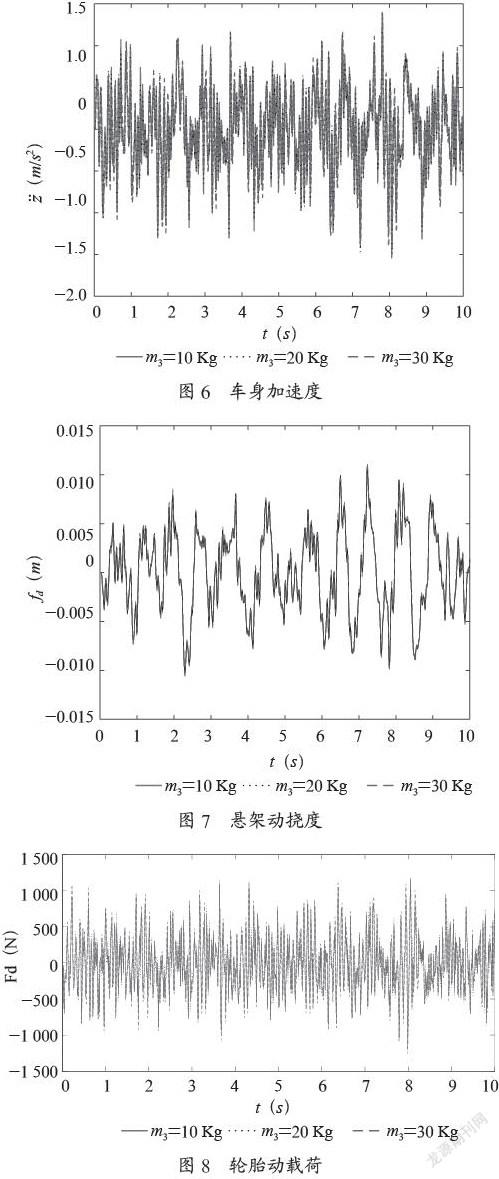
路面等级一般分为8级,各级路面的不平度系数不同,其中B级路面在城市道路中比较常见。轮毂电机驱动电动汽车的使用主要是以城市通勤为主,因此选取B级路面作为仿真随机输入激励,其路面不平度系数Gq(n0)= 6.4×10-6 m3,选取车速为v=30 km/h。在simulink中建立仿真模型,得到轮毂电机质量m3分别取10 kg、20 kg和30 kg时,车身加速度、车轮动载和悬架动挠度三个振动系统响应的均方根值,如表2所示,三个评价指标的时域响应曲线如图6、图7、图8所示。
与频域分析一样,从表2和图6、图7、图8中能够得出,由于轮毂电机质量的不断增大,三个平顺性评价指标车身加速度、悬架动态挠度和车轮相对动载荷均增大。其中,车身加速度的增加幅值较小,总体变化并不十分明显;悬架动挠度的数值增幅也相对较小;而车轮相对动载的增幅则较为明显。另外,从表2的数值中也可以看出,车轮动载荷数值增加最大,在轮毂电机质量m3=10 kg时的343.5 N,到毂电机质量m3=30 kg時的396.2 N,增幅达到15.13%,这将导致车轮接地性下降,影响车辆行驶安全性。由此可见,轮毂电机质量的增加不但影响车辆的行驶平顺性,同时还对车辆的操控稳定性造成影响。
3 平顺性改善建议
根据以上分析,轮毂电机的存在使得车辆非簧载质量增加,影响汽车的平顺性。如何改善轮毂电机驱动电动汽车的行驶平顺性,主要从以下几方面进行考虑。
3.1 轻量化
轻量化,即减小非簧载质量。通过采用轻质材料来制造轮毂、轮胎、制动器等非簧载质量的部件,或者通过优化轮毂电机结构、研发功率密度更高的轮毂电机等来达到减轻电机质量,从而减少非簧载质量,以获得提高车辆行驶平顺性的目的。
3.2 提高悬架性能
将传统的被动悬架替换为半主动悬架或主动悬架,通过半主动悬架或主动悬架改变悬架阻尼力或弹性元件的刚度,以降低非簧载质量增加引起各个平顺性评价指标的增大,以克服非簧载质量对平顺性产生的不利影响。
3.3 安装吸振器
吸振器的原理是在振动物体上附加质量弹簧共振系统,通过将轮毂电机悬置转化为吸振器质量的方法,在共振时产生的反作用力可使振动物体的振动减小来改善车辆垂向特性,同样也能起到改善车辆行驶平顺性的效果。
当然,轮毂电机驱动车辆的行驶平顺性改善可以是采用单一的方案,也可以采用集中方案同时使用,甚至进行各种改善方案之间进行有机结合,集成控制,以达到最佳的平顺性改善效果。
4 结 论
本文建立了1/4车辆振动系统模型和随机路面激励模型,以MATLAB/Simulink为仿真平台建立了相应的仿真模型,分别从时域和频域角度分析了不同非簧载质量情况下,轮毂电机驱动车辆平顺性评价指标对路面速度激励的响应变化情况。结果显示,随着非簧载质量增加,车辆平顺性评价指标均增大,其中车轮相对动载荷变化显著,表明轮毂电机不但对车辆的行驶平顺性有影响,同时还对车辆的操控稳定性和行驶安全性造成影响。最后,结合分析结果,针对非簧载质量增加对汽车平顺性影响,提出了轮毂电机驱动车辆平顺性的改善建议。
参考文献:
[1] 肖文文,张缓缓.轮毂电机驱动电动汽车平顺性综述 [J].上海工程技术大学学报,2017,31(3):247-251.
[2] 韩以伦,李国珊,王强,等.基于垂向振动负效应的新型轮毂电机电动汽车平顺性影响 [J].科学技术与工程,2019,19(16):363-369.
[3] 靳立强,刘阅.基于汽车平顺性的新型半主动悬架研究 [J].科学技术与工程,2014,14(29):295-299+311.
[4] 万松,陈辛波.轮边驱动电动车质量比对车辆性能的影响 [C]//第9届中国机构与机器科学应用国际会议(CCAMMS 2011)暨中国轻工机械协会科技研讨会.西安:出版社不详,2011: 38-41.
[5] 张丽萍,李勇凯,李争鹏.基于MATLAB的轮毂电机驱动电动汽车的平顺性研究 [J].汽车实用技术,2019(2):132-136.
[6] 郭忠庆,高聪聪,陈潮洲.轮毂电机驱动系统对整车行驶平顺性影响的研究 [J].交通节能与环保,2019,15(3):8-11.
[7] 杨明远,冯金芝,张启涛.基于Simulink的随机路面建模及验证 [J].农业装备与车辆工程,2019,57(12):104-107.
作者简介:刘连明(1985—),男,汉族,江西赣州人,实验师,硕士,研究方向:车辆动力学及其控制。