基于四旋翼飞行器的电力巡检机器人系统的研发
2022-06-15 03:32贾相为 郑文龙 黄于晨 王本有
现代信息科技 2022年2期
贾相为 郑文龙 黄于晨 王本有



摘 要:在电力系统中,由于受各种因素的影响,高压电线表面、绝缘子串、杆塔、金具、导线挂点等部位会发生老化或损坏,需要不定期地进行线路检修。在电力巡检机器人身上装配了GPS定位模块,运用机械视觉图像处理技术和无线传输技术,使得巡检机器人可以发现电力线路中存在的各种问题,能够做到实时提醒,保障用电安全。经综合测试分析,该机器人可以自主地完成巡线、拍照自动储存、障碍物检测识别以及远程遥控等任务,有效解决了高压线路的故障检测问题。
关键词:四旋翼飞行器;电力巡检机器人;机械视觉;无线数据传输;GPS
中图分类号:TP242 文献标识码:A文章编号:2096-4706(2022)02-0169-05
Abstract: In the power system, various factors bring perishing or damage to the surface of high-voltage wires, insulator strings, poles and towers, metal fittings, wire hanging points and so on, causing the necessity of circuit maintenance at irregular intervals. The power inspection robot, equipped with GPS (Global Positioning System) positioning module, using mechanical vision image processing technology and wireless transmission technology, the inspection robot can find various problems in power lines, give real- time warnings, and ensure the electricity safety. Comprehensive tests and analyses testify that the robot can independently complete tasks such as inspecting line, automatic photographing and storing, detecting and recognizing obstacles, and remote controlling as well. The problem of fault detection of high voltage line is effectively solved.
Keywords: quadrotor aircraft; power inspection robot; mechanical vision; wireless data transmission; GPS
0 引 言
我国地大物博,地形复杂,人口众多,作为与人们日常生产生活关系最为紧密的主要能源——电力,其在全国的需求十分巨大。国家投入大量资金修建电网,电网线路复杂,遍布全国各地,保证全国各族人民都能安全用电,但在解决人民安全用电的同时也滋生了另一个大问题——电网的维护。高压电线架设高度一般在25~40米,电力工人在检修高压电线时需要在铁塔之间的输电线路上行走,这属于高空作业,带有一定的危险性。
在电力工人作业风险亟待降低的情境下,电力巡检机器人应运而生,该机器人主要由机械结构、电子器件和系统软件三部分组成。机械结构的主要部分是四旋翼飞行器的机身,其整个机身全部采用高硬度、质量轻的碳纤维材料,主要作用是充当主控板、电路模块、各种传感器以及蓄电池等的载体。运用机械视觉巡查和无线数据传输技术,一定程度上减轻了人工电力巡检的艰辛,不仅节省了人力成本,而且大大提升了线路巡检的安全性。因此研发电力巡检机器人在确保电网安全运行方面是大有裨益,也是非常有必要的。巡检机器人的控制系统包括硬件系统和软件系统。
1 硬件系统
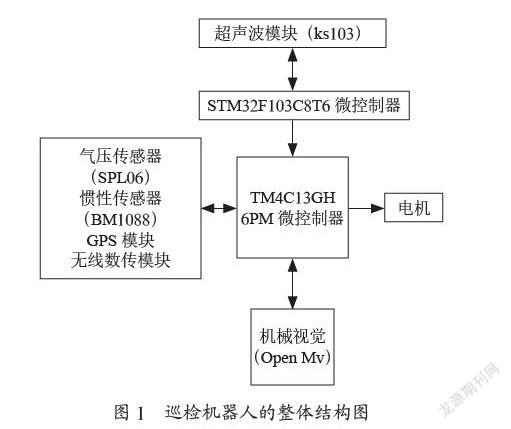
电力巡检机器人的硬件部分主要包括由主控电路、气压传感器(SPL06)、电子罗盘(AK8975)、惯性传感器(BMI088)、GPS北斗双模定位模块ATK1218-BD构成的定点悬停,由机械视觉(OpenMv)构成的发现异常拍照检测系统[1],由无线数据传输模块(NRF24L01)构成的通信系统,以及由ks103超声波模块和STM32F103C8T6微控制器构成的自动探测距离系统。硬件系统的整体结构示意图如图1所示。
1.1 主控電路
硬件系统部分主控制器为TM4C13GH6PM单片机,它具有功耗低、接口丰富、控制方便、易于拓展等优点。这一部分电路的主要作用为:控制整个系统的运转,通过实时采集传感器数据和STM32F103C8T6微控制器传输数据来控制四旋翼飞行姿态,解析OpenMv发送数据,将其位置信息和传感器工作状态信息通过无线数据传输模块(NRF24L01)传送给地面上位机。
1.2 气压传感器(SPL06)
SPL06是一种高精度、低电流消耗的小型双气压计。SPL06既是温度传感器,也是压力传感器。压力传感器元件基于电容式传感原理,确保温度变化时的高精度。SPL06的内部信号处理器可以将压力和温度传感器元件的输出转换为24位结果。每个压力传感器都已单独校准并将测量结果转换为真实的压力值和温度值。气压传感器是用于测量气体绝对压强的,其主要功能是飞行器用以判断其当前高度是否正确[2]。
1.3 电子罗盘(AK8975)
电子罗盘[3-7]是一种重要的导航工具,它能实时提供电力巡检机器人的姿态和航向。该模块采用高灵敏度霍尔传感器技术,通过I2C读取X、Y、Z轴的磁力计数据,通过解算磁力计数据得出较为可靠的偏航角。但是只通过惯性传感器(BMI088)解算出来的偏航角、欧拉角并不准确,所以我们需要通过磁力计解算出来的偏航角予以修正,才能得出准确的偏航。
1.4 惯性传感器(BMI088)
惯性传感器是用于检测和测量加速度、振动、冲击、倾斜、旋转和多自由度(Degree of Freedom, DF)运动的一种传感器。惯性传感器(BMI088)是一款高性能6轴惯性传感器,由16位数字三轴±2 000°/s陀螺仪和16位数字三轴±24 g加速度计组成,允许高精度测量方向和沿三个正交轴的运动检测,可以很好地实现三维的比力和角速率测量,抑制飞行器发生漂移[8]。
1.5 GPS北斗双模定位模块
由于是在室外工作,巡检机器人必须搭载定位模块,用于测量四旋翼飞行器的飞行速度以及四旋翼飞行器的位置信息[9]。如果巡检机器人未搭载定位模块,则其在户外工作中飞行到一定高度后就无法实现定点悬停,会出现飞行器跑丢的情况。在这里我们使用的定位模块是GPS北斗双模定位模块ATK1218-BD,芯片采用的是S1216芯片,通信协议使用的是NMEA-0183协议,定位精度在2.5 mCEP,数据更新速率最高可达20 Hz,捕获追踪灵敏度为-165 dbm,工作温度在-40 ℃~85 ℃之间,完全能够经受住高空作业时的环境温度。此外,其外形小巧、便于搭载、价格便宜,非常符合我们巡检机器人的设计需求。为防止模块突然断电导致星历数据的丢失,该模块上装有小型纽扣电池,如果模块在掉电半小时以内重新上电,该模块便可在几秒内快速实现定位,真正做到了秒定。
1.6 机械视觉(OpenMv)
机械视觉采用OpenMv,一是因其体积小便于搭载在四旋翼飞行器上,二是因其具有成本低、开发周期短等优点。OpenCv虽然功能强大、像素高,但其开发周期长、体积大不便于搭载在四旋翼飞行器上,因此被舍弃。这里我们使用的是32位处理器的OpenMv4H743II,STM32H743II是一款基于ARMCortex M7内核STM32系列的32位微控制器,主频高达480 MHz,拥有1 MB RAM(随机存取存储器)和2 MBflash(程序存储器),OpenMv4H743II的像素高达500 W,完全能够满足我们的需求。主要利用其颜色及形状等智能识别算法检测高压电线故障问题并进行拍摄和存储故障照片[10,11]。
1.7 无线数据传输模块(NRF24L01)
Si24R1是一款工作在2.4~2.5 GHz,世界通用ISM频段的单片无线收发器芯片。输出功率频道选择和协议的设置可以通过SPI接口实现。是目前2.4 G无线射频芯片中,性价比较高的一款芯片。
NRF24L01是一款挪威NordicVLSI公司出品的工作在2.4 GHz的国际通用无线数传芯片。其灵敏度高,发射功率大,并且支持125个通信频率,是目前市场上主流的2.4 G无线射频芯片,其功耗低于Si24R1。增强型的Enhanced ShockBurstTM传输模式,使得NRF24L01支持6个数据通道,大大提高了数据传输效率,此外,NRF24L01还支持250 k、1 Mbps和2 Mbps的数据传输速率。使用SPI通信与MCU完成数据信息通信与通信控制等功能。
考虑到巡检机器人高空作业时的功耗问题,我们选择NRF24L01作为巡检机器人的通信模块。通过此模块将巡检机器人的飞行状态、飞行姿态以及各传感器采集的数据实时传送到地面上位机。
1.8 自动探测距离装置
该探测装置的主控使用的是STM32F103C8T6微控制器,它是一款基于ARM Cortex M内核STM32系列的32位微控制器,属于中等容量单片机,flash容量为64 KB,主频高达72 MHz。拥有3个高速串口、2个IIC等丰富的外围设备,完全能够满足该装置对主控的要求。距离的测量使用的是高性能、低功耗超声波(ks103),该超声波支持IIC和TTL两种通信方式,这里使用的是IIC通信,通信速率为50~100 kbit/s,探测速率可达500 Hz,不仅探测速度快而且精度高(精度达1 mm~3 mm)。自带滤波降噪器,在受到较大噪音干扰时,仍可正常工作。其配置方法也比较简单,只需向超声波(ks103)发送指令时序“IIC地址+寄存器2 +0x70/0x71/0x72/0x73/0x74/0x75”即可,发送完成后延时至少2秒,以让系统自动完成配置。所以该装置總的工作流程为:STM32F103C8T6微控制器向超声波(ks103)发送探测指令,超声波(ks103)收到探测指令后立即开始探测并将探测到的距离数据通过串口发送给STM32F103C8T6微控制器,STM32F103C8T6微控制器再将超声波(ks103)发送来的数据通过串口发送给TM4C13GH6PM飞控。
2 软件系统
软件系统主要由飞行姿态实时控制功能模块、图像处理功能模块、自动探测距离功能模块、人机交互界面等4个功能模块组成。系统总流程图如图2所示。
2.1 飞行姿态实时控制
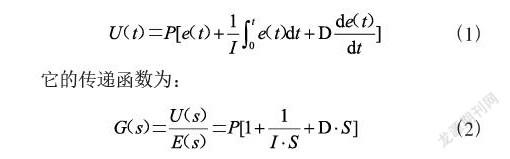
系统利用惯性传感器采集飞行姿态参数并传送给TM4C13GH6PM单片机,采用卡尔曼滤波算法根据气压计和罗盘采集的数据,计算得出期望姿态角,然后通过PID控制算法[12],将期望姿态角转化为PWM值输出到电机,从而实现对飞行姿态的实时控制。PID控制算法的输入e(t)与输出U(t)的关系为:
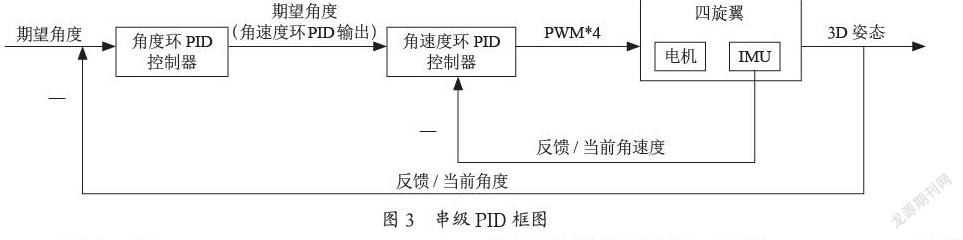
单极PID适用于线性系统,四旋翼飞行器输出的电压和电机转速并非呈正比关系,因此四旋翼飞行器不是线性系统,四旋翼飞行器通常被简化为一个二阶阻尼系统。螺旋槳转速和升力是平方关系,单极PID在四旋翼上很难取得理想效果,因此我们采用串级PID算法。串级PID就是将两个PID串在一起,分为内环PID和外环PID。我们采用内环PID控制角速度,外环PID控制角度。单极PID输入的是期望角度,反馈的是角度数据,串级PID中外环输入的是期望角度,反馈的也是角度数据,内环输入的是角速度数据,反馈的便是角速度数据。串级PID框图如图3所示。
对电机组进行闭环调节,从而实现定点悬停、一键起飞定高和降落等指定功能。其核心代码为:
static void Loop_Task_0()//1ms执行一次
{ Fc_Sensor_Get(); //传感器数据读取
Sensor_Data_Prepare(1) ;//惯性传感器数据准备
IMU_Update_Task(1);//姿态解算更新,如果偏转关闭电子罗盘,获取WC_Z加速度
WCZ_Acc_Get_Task();
WCXY_Acc_Get_Task();
ANO_DT_Data_Exchange(); //数传数据交换
}
static void Loop_Task_1(u32 dT_us) //2ms执行一次
{float t1_dT_s;
t1_dT_s = (float)dT_us *1e-6f;
Att_1level_Ctrl(2*1e-3f); //姿态角速度环控制
Motor_Ctrl_Task(2); //电机输出控制
}
static void Loop_Task_2(u32 dT_us) //6ms执行一次
{float t2_dT_s;
t2_dT_s = (float)dT_us *1e-6f;
calculate_RPY();//获取姿态角(ROLL PITCH YAW)
User_my_yaw_2level(6,line); //寻线YAW(航向角)修正
Att_2level_Ctrl(6e-3f,CH_N); //姿态角度环控制
}
static void Loop_Task_5(u32 dT_us)//11ms执行一次
{
float t2_dT_s = (float)dT_us *1e-6f;//0.008f
WCZ_Fus_Task(11); //高度数据融合任务
GPS_Data_Processing_Task(11);
Alt_1level_Ctrl(11e-3f); //高度速度环控制
Alt_2level_Ctrl(11e-3f); //高度环控制
AnoOF_DataAnl_Task(11);
}
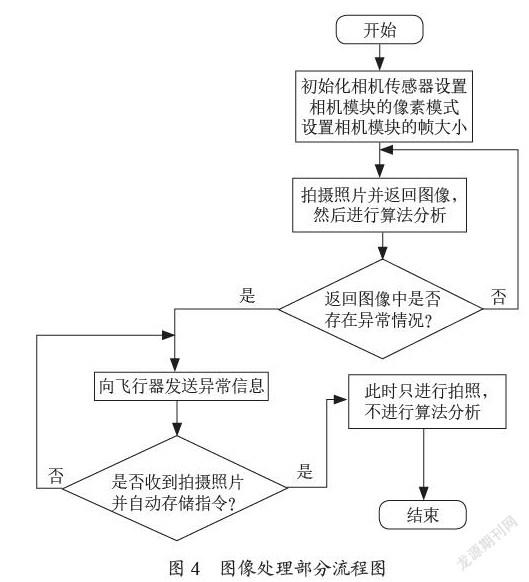
2.2 图像处理功能
使用OpenMv自带颜色和形状识别算法对巡检电线进行拍摄分析,如果识别到异常,OpenMv会向巡检机器人发送异常信息,巡检机器人接收到异常信息后会立即向OpenMv发送拍照指令,OpenMv拍完照片后会自动保存。该部分流程图如图4所示。
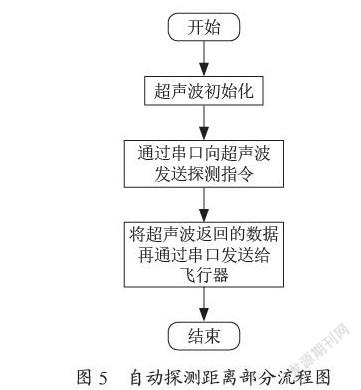
2.3 自动探测距离功能
STM32F103C8T6微控制器通过IIC通信向ks103超声波发送探测指令,超声波(ks103)接收到指令后开始探测,并将探测到的距离通过串口发送给STM32F103C8T6微控制器,最终STM32F103C8T6微控制器再将自己接收到的距离信息通过串口发送给TM4C13GH6PM微控制器。该部分流程图如图5所示。
2.4 人机交互
将处理器中的传感器数据、蓄电池电压以及飞行器的飞行状态等信息通过无线数据传输模块(NRF24L01)实时发送到上位机进行显示。通过上位机也可以实时控制飞行器的飞行状态以及使飞行器紧急降落。
3 测试与实验
从三个方面对飞行器工作性能进行测试及结果分析:
(1)飞行器定高巡航测试。通过设定高度,利用卷尺测量,飞行器自动测量数据并发送到上位机PC上,一键起飞定高后,飞行器到达设定高度后自动悬停,然后使用卷尺测量巡航高度,飞行器的巡航高度测试结果如表1所示。
(2)巡航测试。设置障碍物6处、电线破损3处、接点老化变色3处、经多次测试,识别率达100%,能及时拍照、保存并转发到上位机PC上。
(3)巡检过程中巡检机器人与电线的安全距离测试。安全距离设置为45 cm,测试过程中通过人为移动电线来模拟实际工作中电线角度的变化,利用卷尺测量,飞行器上搭载的自动探测距离装置将探测到的距离数据发送到上位机PC上,巡检过程中安全距离测试结果如表2所示。
测试结果分析:一键起飞定高巡航测试能够准确完成,误差较小,但模拟环境较简单,实际测试环境下还要进一步优化。
4 结 论
使用者只需将该智能电力巡检机器人放到需要巡检的高压电线下,接通电源并解锁,该机器人即可开始巡检工作,其在检测到异常情况时会自动拍照并存储,整个过程不需要人为干预,使用者可在距离其2千米以内的地方通过上位机进行实时监控。经实际测试,该机器人运行状态良好,可以自主完成巡线、拍照自动储存、障碍物检测识别等功能。不仅提高了巡检效率,而且降低了巡检成本,同时电力工人的安全也得到一定的保障。我国是一个电力大国,该巡检机器人对于改变我国人工电力巡检工作具有重大的现实意义。
参考文献:
[1] 李力.旋翼飞行机器人视觉定位方法及电力巡线应用研究 [D].长沙:湖南大学,2016.
[2] 河海大学.一种基于多气压传感器定高的小型飞行器:CN206671893U [P].2017-03-21.
[3] 彭树生.数字电子罗盘HMR3000的特性及应用 [J].电子技术,2004(8):39-43.
[4] 求是科技.单片机典型模块设计实例导航 [M].北京:人民邮电出版社,2004:176-189.
[5] 陈皓生,徐军,李疆.HMR3000数字罗盘在微型飞行器中的应用 [J].传感器技术,2001(9):44-46.
[6] 张颖.基于高级语言的HMR3000模块接口编程 [J].兵工自动化,2002(4):41-43.
[7] 赵毅强,管大年,陈豪敏.电子罗盘在精确定位平台中的应用 [J].传感技术学报,2005(1):140-142.
[8] 曾唯.微型惯性传感器应用于飞行器模型姿态测试的研究 [D].厦门:厦门大学,2007.
[9] 朱振乾,张建洲.GPS和惯导信息在飞行器制导中的综合应用 [J].航天控制,1996(2):1-9.
[10] 周士超.无人机电力巡检视觉避障技术研究 [D].北京:北京理工大学,2016.
[11] 刘俍.输电线路巡检中的电力线追踪算法研究与工程应用 [D].济南:山东大学,2013.
[12] 宿敬亚,樊鹏辉,蔡开元.四旋翼飞行器的非线性PID姿态控制 [J].北京航空航天大学学报,2011,37(9):1054-1058.
作者简介:贾相为(1999—),男,汉族,安徽阜阳人,本科在读,研究方向:智能控制;郑文龙(2000—),男,汉族,安徽合肥人,本科在读,研究方向:智能控制;黄于晨(2002—),女,汉族,安徽淮南人,本科在读,研究方向:智能控制;通讯作者:王本有(1970—),男,汉族,安徽六安人,副教授,硕士,研究方向:机器人与智能控制应用。