基于机器视觉的智能垃圾分拣小车的设计与实现
2022-06-15 03:32高少伟 郭磊 陈其菠 陈帅兴
现代信息科技 2022年2期
高少伟 郭磊 陈其菠 陈帅兴

摘 要:目前我国生活垃圾分拣的方式仍然以人力为主,其在消耗人力的同时还存在工作强度高、效率低以及影响环卫工人身体健康等缺陷。为解决以上问题,文章以STM32为主控芯片,以树莓派为运算部件,设计出以四轴机械臂、机械爪以及传感器为机械部件并辅以YOLOv5深度学习识别模型的智能垃圾分拣小车。在实现垃圾分拣一体化的同时,还部分解决了人工垃圾分拣的缺陷。
关键词:机器视觉;智能;垃圾分拣小车
中图分类号:TP391.4 文献标识码:A文章编号:2096-4706(2022)02-0180-03
Abstract: At present, the sorting method of domestic waste in my country is still mainly manpower, which consumes manpower and also has defects such as high work intensity, low efficiency and affecting the health of sanitation workers. In order to solve the above problems, this paper takes STM32 as the main control chip and raspberry pie as the calculation part, and designs an intelligent garbage sorting trolley with four-axis mechanical arm, mechanical claw and sensor as the mechanical parts, supplemented by YOLOv5 deep learning recognition mode. While realizing the integration of waste sorting, it also partially solves the defects of artificial waste sorting.
Keywords: machine vision; intelligence; garbage sorting trolley
0 引 言
随着生活水平的逐步提高,我国生活垃圾的种类和数量也在逐年递增[1]。生活垃圾的无序堆放,不仅挤占有效市容空间还会對城市环境造成污染。当然,生活垃圾也并非全部为废弃物,合理的处理方式不仅能够使得资源再利用,还能避免对环境造成二次污染[2]。垃圾分类制度虽然已经在我国大部分地区开始实行,但是市民对于垃圾分拣的知识仍然较为匮乏,城市公共空间中的生活垃圾分类问题仍然依靠市民的自觉。现阶段垃圾分拣工作仍然以人工为主,在消耗物力以及人力不出错的前提下不仅会造成劳动力的浪费,分拣效率也会随着工作时长的增加而降低,同时还可能存在损害健康的风险[3]。因此,设计一款既能满足垃圾高效、合理分拣要求,又能规避人工分拣缺陷的较为低廉的智能垃圾分拣设备,就成为关乎环境保护和人民生命安全的迫切需求。
1 智能垃圾分拣小车的总体设计方案
1.1 功能描述
智能垃圾分拣小车主要应用于城市中地面垃圾的收集以及分拣的场景,通过对城市生活垃圾的识别,归类出所属的垃圾类型,完成一系列定位、收集、拾取、分类操作,实现在指定起始位置下,完成自动搜寻、发现最终将同类垃圾统一投放到指定的垃圾分拣区域,完成全自动无人化垃圾分拣工作。
1.2 总体设计方案
智能垃圾分拣小车以单片机为主控芯片,由树莓派、摄像头构成机器视觉模块,六轴传感器、磁性编码器、陀螺仪、驱动电机、麦克纳姆轮以及四轴机械臂和机械爪为动作部件,三者联合并结合深度学习模型实现智能垃圾分拣小车的总体设计方案。在树莓派加载机器视觉模块后,通过摄像头定位到垃圾,对其进行识别分类后反馈给主控芯片,主控芯片把机器视觉模块得出的垃圾信息传导给动作部件,最终由动作部件实现垃圾的收集和拾取操作完成分拣[4]。设计方案具体流程为:
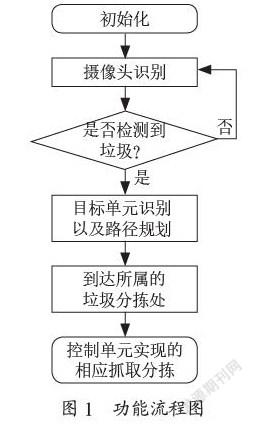
首先机器视觉模块通过摄像头采集的视觉信息进行垃圾定位、垃圾分类以及完成小车运动路径规划,然后主控芯片把机器视觉模块提供的数据分别反馈给垃圾收集和拾取模块和运动模块,小车整体运动将垃圾推向垃圾分拣区域,完成小车的运动以及垃圾的收集和分类拾取。其中,垃圾收集和拾取模块通过获得的数据操控舵机进行机械爪地张开和闭合、机械臂对目标方向的运动和抓取方式即钉子或磁铁的选用;运动模块通过获得的数据,依照规划好的路径结合传感器和编码器的反驱动电机进行小车的整体运动,保证整体路线不偏移。最终,通过机器视觉模块结合垃圾收集和拾取模块以及运动模块的共同配合,将垃圾按照类别移动到指定的放置区域完成分拣。功能流程图如图1所示。
2 机器视觉模块的设计
机器视觉模块包括树莓派、摄像头和深度神经网络模型。树莓派可以完成相同的IO引脚控制之外,还能运行有相应的操作系统,可以完成更复杂的任务管理与调度。摄像头采用市面上较为流行的Open CV进行识别。
相对于EfficientDet模型,YOLOv5在更快推理速度的前提下能够获得更高的AP指标,精度有显著的提高。固本深度神经网络采用YOLOv5网络模型进行训练,经过Mosaic数据增强、自适应Anchor计算以及自适应图像缩放等操作,大大提高了模型的训练效率和模型的分类能力。
和以往对图片进行翻转、放大、缩小进行的数据增强不同,Mosaic数据增强是将多张图片进行随机缩放、裁剪、排布并拼接到一张图片上,从而减少训练过程中出现非信息像素,以及混合后图片不自然的情况,提高了模型的训练效率和分类能力;自适应anchor计算是在模型训练中采用真实边框相对于预设边框的偏移构建多个不同形状以及大小的自适应anchor,提高了检测的召回率以及精度;自适应图像缩放是把输入图像长宽等比缩放到模型预定得尺寸,即若缩小后图片长或宽小于预设尺寸,则长或宽用“0”即全部涂黑进行填充图片至图片到达预设图片尺寸,以防止图像在缩放过程中出现比例错误,导致图像的长宽比与预设不一致,造成模型识别有误的现象。
算法模型主要采用Focus、CSP、FPN+PAN结构,极大提高了神经网络模型获取特征的能力;损失计算采用GIoU Loss,即在预测框上加入了一个闭包惩罚,从而减少双框合并面积在闭包的比例,使预测框极大拟合目标框[5]。YOLO处理流程为:
(1)将图像resize到448×448作为神经网络的输入。
(2)运行神经网络,得到一些Bounding-Box坐标、Box中包含物体的置信度和class probabilities。
(3)进行非极大值抑制,筛选Boxes。垃圾分类效果如图2所示。
3 动作部件的设计
智能垃圾分拣小车的动作部件是以STM32F103ZET6作为主控芯片,采用机械爪、四轴机械臂、六轴传感器结合霍尔编码器反馈输出的信息,通过校准的驱动电机以及麦克纳姆轮联合实现。
3.1 垃圾收集和拾取模块设计
垃圾收集和拾取模块以STM32F103ZET6作为主控芯片,小车前端的机械爪以及位于小车上方的四轴机械臂完成垃圾的收集和拾取操作。
小车前端的机械爪由两个舵机进行驱动,小车在初始状态下机械爪张开,当小车识别到目标并对目标方向运动时,机械爪闭合对车身附近垃圾进行聚拢和收集,防止小车在运动的过程中目标消失,以便能够更好地完成下一步动作。
四轴机械臂主要由一个云台、四个舵机以及若干连接用U型架构成,机械臂的前端采用钉子结合磁铁的模式以方便对不同类型的垃圾进行拾取分类[6]。四个舵机中最下方的舵机用于控制机械臂的左右运动,中间两个舵机用于控制机械臂的上下来回运动,最前端舵机则用于控制磁铁的磁吸以及推出。其中,四轴机械臂的结构可以保证机械臂在180度范围内自由运动,更方便完成垃圾拾取操作;机械臂前端锋利的钉子可以对一些柔软的物体进行钉取,对于可磁吸的金属垃圾则通过强力磁铁的方式吸取获得,两者结合大大提高了垃圾拾取的效率。
3.2 运动模块设计
在摄像头结合机器视觉模块获取目标单元的定位分类及路径规划信息后,主控芯片控制l 298 n电机驱动并结合霍尔编码器的反馈对麦克纳姆轮进行整体运动。麦克纳姆轮辊子轴线和轮毂轴线夹角成45°,轮毂的轮缘上斜向分布着许多小轮子,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,可以轮子能够连续地向前滚动,从而实现机体全方位移动功能。
编码器能够将电机的機械几何位移转化为脉冲信号或数字量,利用检测编码器输出的脉冲信号,能够获取电机转动的角度、转速等相关信息,再由MPU6050传感器获得的姿态信息并结合编码器反馈的数据,通过PID算法减小偏移误差,从而实现小车前后的直线行走以及掉头、转弯等运动操作。同时,在MPU6050中利用陀螺仪传感器测量的角度结合角速度传感器测量出的加速度,可以得出小车在行进中的偏移方向,再通过PID算法调整轮子的转速从而达到控制方向的目的,保证小车整体可以按照规划路径行进。
4 功能测试
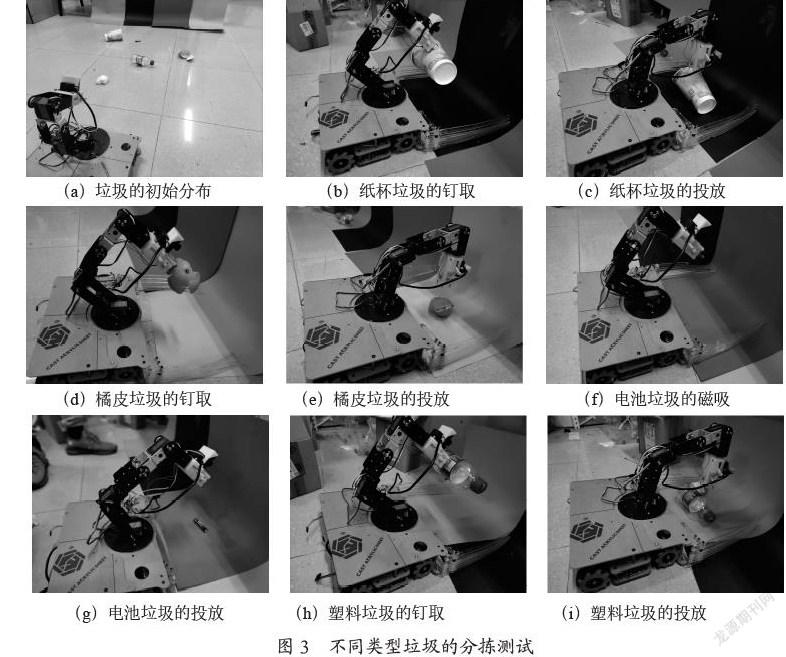
智能垃圾分拣小车通过系统初始化后,摄像头开启,树莓派加载机器视觉模块进行垃圾定位分类以及完成路径规划,主控芯片接收到机器视觉模块反馈的信息后控制小车整体移动到垃圾处并进行聚拢收集,再通过树莓派得到的信息将垃圾推向大致所属分拣区域,最后由机械臂完成每个个体相对于垃圾分拣区域的拾取。测试采用5种不同类型的垃圾进行拾取,测试结果如图3所示。
由图3可知,小车完成了纸杯、橘皮、电池和塑料垃圾的定位、收集、分类和拾取的操作,实现了对四种类型垃圾的全自动智能机械式分拣。
注:3(f)、3(g)区域要求投放有害垃圾,3(h)、3(i)区域要求投放可回收垃圾,3(b)、3(c)区域要求投放其他垃圾,3(d)、3(e)区域要求投放厨余垃圾。
5 结 论
随着科学技术的发展,人工垃圾分拣的工作效果显得越来越不理想,国内对于人们垃圾分拣的意识宣传较为匮乏,城市环境在不规范合理的垃圾堆放下显得越来越糟糕。基于机器视觉的智能垃圾分拣小车以STM32为主控制器,通过机器视觉模块的识别、定位、分类与动作部件的运动、收集、拾取、分拣的结合,实现了对不同种类、不同尺寸大小的生活垃圾的全自动智能化分拣操作。该套智能设备在节省大量劳动力的同时还能避免人工分拣带来的健康风险。与人工分拣相比,它价格相对低廉,不受气候、时间和体力的限制,工作时长要远远大于人工,并且在分拣效率方面也有极大的提升。一套完整的智能垃圾分拣小车对于生态环境的保护和资源的重复利用带来了便利,也为智能垃圾处理设备的实用化提供了有意义的参考。
参考文献:
[1] 王帅,韩贞年,刘新星,等.一种生活垃圾回收装置控制系统的研究 [J].河北省科学院学报,2021,38(2):41-44.
[2] 秦铂涛.基于视觉识别的智能垃圾分拣车的设计与实现 [J].机械研究与应用,2021,34(6):90-92.
[3] 吕纯.城市生活垃圾机器视觉智能分拣系统、软硬件设计要点研究 [J].智能城市,2020,6(20):8-9.
[4] 郜辉,吕志刚,王宾,等.智能垃圾分拣系统的设计 [J].自动化与仪表,2020,35(12):31-34+39.
[5] 董子源.基于深度学习的垃圾分类系统设计与实现 [D].辽宁:中国科学院大学(中国科学院沈阳计算技术研究所),2020.
[6] 马嘉宁,张立昂,张荣峰,等.智能垃圾分拣机器人 [J].河北农机,2021(7):80-81.
作者简介:高少伟(2000—),男,汉族,广东汕头人,本科在读,研究方向:机械设计;通讯作者:郭磊(1982—),男,汉族,黑龙江哈尔滨人,讲师,博士,研究方向:图像处理与机器视觉;陈其菠(2002—),男,汉族,广东韶关人,本科在读,研究方向:软件设计;陈帅兴(2001—),男,汉族,广西钦州人,本科在读,研究方向:机器视觉。
猜你喜欢
儿童故事画报·智力大王(2018年7期)2018-11-02
数学大王·低年级(2017年9期)2017-09-18
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
世界汽车(2016年8期)2016-09-28
企业导报(2016年10期)2016-06-04