基于深度学习算法的健美操动态姿势识别分析系统
2022-06-15 04:58项亚光
安阳工学院学报 2022年4期
贺 莉,项亚光
(皖西学院 体育学院,安徽 六安 237012)
0 引言
随着生活水平的提高,人们对自身健康的关注程度也越来越高[1]。健美操由于韵律性强、步法简单逐渐成为一种主流的健身方式,但大多数运动者缺乏对自身姿态的正确认知,且由于动作要领不当等问题,极易因自身姿势变形而引起运动性损伤。如果能对运动者的动作姿势进行识别与分析,并提出相对合理的改善意见,将能够最大程度上降低因姿态不当而带来的非必要损伤[2-3]。传统时空权重姿态运动特征型识别方法能够根据人体姿态视频帧间的时空特征,确定动态节点之间的时序建模关系,再利用大数据技术,实现对关联节点的按需识别。然而此方法对于健美操动态姿势的捕捉精准性水平较差,且由于计算量相对较大,易造成位姿数据识别时间的无限延长[4]。深度学习网络的实质就是对人类脑神经系统的模拟,在应用过程中,同时包含多个隐藏层结构。一般来说,与前面隐藏层组织匹配的输入数据特征等级较低,而与后面隐藏层组织匹配的输入数据特征等级较高,为保证分类行为的准确性,所有高级数据特征都是由低级数据特征转化而来的。深度学习网络的“深度”主要体现在网络层组织的连接数量上,与传统算法相比,该类型网络的应用层级数量水平明显更高。同一网络模型中往往包含多个相互对应的非线性映射关系,这样的优点在于低级特征能够通过变换处理的方式,逐渐转变成中级特征,并随着网络层次性等级的改变,最终累积成为高级特征。对于人体行为识别而言,深度学习网络能够总结行为帧的空间特征,一般包含连续图像的物体轮廓、前景、背景、颜色、纹理等。由于深度学习网络具备以上优势,为了解决上述问题,本文引入深度学习算法的应用思想,并以此为基础,设计一种新型的健美操动态姿势识别分析系统。
1 硬件特化人体骨架模型
以健美操运动为例,人体的动作可被看作是一系列随时间变化而出现的位姿数据,相较于其他方法,人体骨架这一特殊的运动学特征模型在描述姿势变化状态方面具有极大的应用优势。
为了在少量传感器元件配合的情况下使用反馈微调框架,人为规定健美操动态姿势识别分析系统所使用的特化人体骨架模型必须是二维存在形式的,这有利于准确识别二维特征(例如蹦跳、挥手、晃动等)较强的动作位姿,但对于三维特征(例如旋转、翻转等)较强的动作而言,则具有较为明显的局限性。
(1)关节点
在健美操运动过程中,特化骨架模型将人体结构简化成了11个独立的关节点传感器及它们之间的连接线段,这11个独立的关节点分别为右手、右手肘、右脚、右膝盖、左手、左手肘、左脚、左膝盖、腰、头还有锁骨。当运动行为发生变化时,这些关节表现出的变化情况极为明显,对于较为关键的节点组织而言,根据它们的运动学特征,就可以大体上掌握人体的基本动作趋向[5]。利用10根线段将上述11个关节节点连接起来,就可以得到一幅初始的人体特化骨架模型。
(2)关节角
人在进行健美操运动的时候,各关节处连接的骨头的摆动频率及幅度都具有很明显的特征,且这些物理量指标都可以由关节点传感器直接测量得到,根据这些物理量,能够准确描述各个身体部位的实际运动情况。将对应的关节节点作为顶点,与之相连的两条线段作为两个边,那么由它们所构成的物理夹角,也就叫与对应关节相关的关节角。
(3)关节角的角加速度
关节角的角加速度描述了进行健美操运动时,各个身体躯干部分的动作幅度,将其与关节点传感器测量得到的标准动态姿势样本对比,从而研究受识别者的运动学动作特征,并给出相应的分析意见。
(4)关节点的重叠
在深度学习算法支持下,健美操动态姿势识别分析系统所提取出的人体骨架是二维形式的,因此,随着运动行为的展开,特化人体骨架模型中势必会出现一定程度的节点重叠现象,此时关节点传感器直接提取出来的关节点数量也就相对较少[6]。
(5)特殊化
对于特定的健美操动作,在实施姿势分析与识别时,需要忽略一些不必要的关节点动态行为,从而达到改变各个数据所属权重值的目的。
2 基于深度学习算法的动态姿势识别
基于深度学习算法的动态姿势识别包含动态姿势数据整合、RBM系数调节、识别系数反馈微调三个处理环节,具体操作方法如下。
2.1 动态姿势数据整合
对于健美操运动而言,动态姿势数据整合是一个相对复杂的处理环节。在深度学习算法支持下,可将健美操运动看成是多个分级节点的连续表达形式,且根据节点所处位置的不同,这些姿势数据所展现出的表达形式也会有所不同。若将整个深度学习网络看作是一个同时包含X轴、Y轴、Z轴的坐标空间,每一个动态姿势节点也会因为所处位置的不同,而展现出不同的坐标组成形式[7-8]。一般来说,位置靠上节点的Y轴坐标值相对较大,置于身体前侧节点的Z轴坐标值相对较大,而置于身体左侧节点的X轴坐标值相对较大。设健美操运动的起始坐标点为O(x0, y0,z0),s1(x1, y1, z1)、s2(x2, y2, z2)、…、sn(xn, yn, zn)分别代表n个不同的动态姿势点坐标,在深度学习网络空间内,参数n的取值结果无限趋于+∞ 。联立上述物理量,可将基于深度学习算法的健美操动态姿势数据整合结果表示为:

公式(1)中,两个动态姿势点坐标之间的影响关系如下:
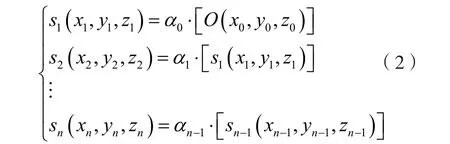
其中,a0、a1、…、an-1分别代表n个不同的节点坐标整合系数。数据集合中的每一个动态姿势坐标都对应一个独立的节点分类条件,当完成所有的坐标样本处理后,将数据集合存入深度学习网络中,以便于系统下一阶段指令的直接调用[9-10]。
2.2 RBM系数调节
RBM系数调节是健美操动态姿势识别分析系统设计过程中的必要处理环节,在深度学习算法的作用下,该处理步骤以层层递增的方式,确定整合后动态姿势数据的实用性价值,再通过计算隐藏层、可见层结构体之间干预权值的方式,来判断系统内识别分析指令所处的实时传输位置[11]。从这个层面来看,RBM系数调节对于健美操动态姿势识别分析系统的构建至关重要,在普通深度学习网络的训练过程中,最难解决的问题就是怎样选择最为适宜的初始化参数赋值结果,从而使得整个系统保持较强的操作灵活性,如果这个参数的选择结果不能完全满足实际应用需求,往往会导致系统主机对于健美操动态姿势的捕捉精准程度下降,并最终造成位姿识别结果出现较大偏差[12-13]。
图1展示了深度学习网络每层RBM结构之间的具体调节过程。
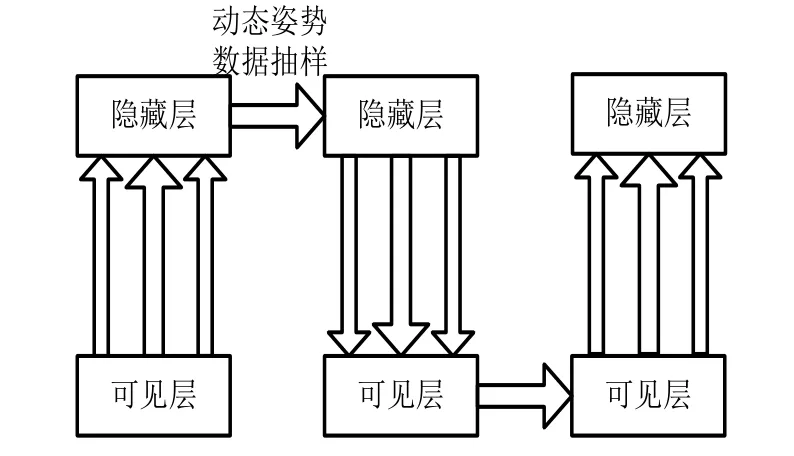
图1 基于深度学习算法的RBM系数调节原理
对于健美操动态姿势识别分析系统而言,所有RBM系数首先执行由可见层到隐藏层的转换,且经历了这次的转换处理之后,系统主机能够以隐藏层组织作为基层结构,对健美操动态姿势数据进行抽样处理隐藏层,在准确掌握隐含层节点存在状态的同时,根据深度学习算法,反推可见层节点的执行应用能力[14]。一般来说,完成这次转化处理后,还要再按照上述流程,进行一次由可见层到隐藏层的转换处理,这也是保障健美操动态姿势数据抽样指令能够得以连续执行的主要原因。
2.3 识别系数的反馈微调
深度学习算法的反馈微调主要包含如下三个实现过程:加载动态姿势数据文件、构造待识别的数据立方体、循环调节[15]。其中,前两个执行过程能够为识别分析系统的响应做足前期准备工作,而最后一个执行过程中则能够直接影响深度学习算法在反馈微调机制中的应用能力。
图2描述了健美操动态姿势识别分析系统系数指令的反馈微调执行流程,整体结构形式分为5层,在深度学习算法的作用下,随着层次数量的增加,该层级结构中识别系数的维度水平逐渐降低。在反馈微调阶段,系统主机首先根据深度学习算法,自底向上执行识别系数的转换,而到了最高层的Layer(4)识别层次结构之后,再进行自下而上的数据转换处理,从而实现对整个反馈微调结构的二次构建[16]。

图2 识别系数指令的反馈微调流程
(1)加载动态姿势数据文件。在实施识别系数的反馈微调之前,经历了多次完整的RBM系数调节流程,这就使得深度学习网络的每个层级结构都被分配了与之相关的链接权值结果。
(2)构造待识别的数据立方体。这一过程的执行目的与健美操动态姿势识别分析系统的执行需求完全相符,经历了RBM节点的调节处理之后,动态姿势数据的传输速率不断加快,这也是新型系统在识别运动位姿数据方面所需消耗时间相对较短的主要原因。
(3)循环调节。这一过程是识别系数反馈微调体系的主体部分,能够在深度学习算法的作用下,对健美操动态姿势数据进行全局调度处理。
3 健美操动态姿势识别分析系统功能设计
在深度学习算法的支持下,按照特化人体骨架模型构建、行为识别数据集确定、信号特征提取的处理流程,实现健美操动态姿势识别分析系统的设计与应用。
3.1 行为识别数据集
在健美操动态姿势识别分析系统中,行为识别数据集可以分为RGB视频数据集、RGB-D深度视频数据集两种,一般来说,这两种形式的数据集信息都是由深度相机直接采集得到的,如常见的骨架关节点、深度图像序列等[17]。RGB视频数据集的每一段数据都只包含一个运动行为种类,对于健美操运动而言,由于关节点姿态的变化,这种数据集采集方式就显得略微单一。RGB-D深度视频数据集的每一段数据都包含多种运动行为种类,并且不对关节点的姿态存在形式进行严格要求[18]。假设健美操行为识别数据集是动态姿势数据整合集的子集存在形式,ε表示动态行为系数,联立公式(1),可将健美操运动的动态行为识别数据集表示为:

其中,p1表示RGB视频数据集中的信息识别条件,p2表示RGB-D深度视频数据集中的信息识别条件,x表示既定关节点处的运动姿势变化量。一般来说,行为识别数据集的覆盖范围越广泛,就表示健美操动态姿势节点的存在数量越多。
3.2 信号特征提取
信号特征提取是一种从行为识别数据集中提取能够准确表示健美操动态姿势运动特性的过程中。通过提取信号特征的方式能够减少运动行为信号的维度,这样能够最大化提升系统主机对于运动位姿数据的识别与分析速度。在深度学习算法作用下,信号特征提取能够清晰、简单地表现出健美操动态姿势的变化情况,且在特化人体骨架模型中,由于关节点数量相对较少,线段相互交叠事件的发生几率可以得到较好控制,这也是健美操动态姿势识别分析系统能够对运动位姿数据进行精准捕捉的主要原因[19-20]。假设θ0代表动态姿势节点的初始识别系数,θn代表动态姿势节点的最大化识别系数,联立公式(3),可将信号特征提取结果表示为:
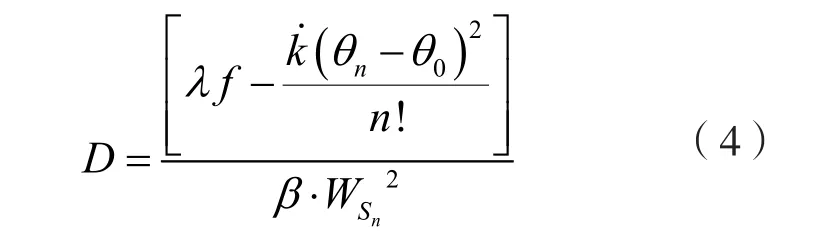
上式中,表示健美操动态位姿信号的维度特征值,f表示既定的运动位姿数据,λ表示基于深度学习算法的信号识别系数,β表示特化人体骨架模型中的线段交叠向量。至此,实现了各项指标参量的计算与处理,在深度学习算法的支持下,完成健美操动态姿势识别分析系统的设计。
4 仿真实验
为证明设计系统的应用价值,设计如下仿真对比实验。利用计算机软件模拟如图3所示的健美操动态姿势,在连续运动过程中,分别采用传统的时空权重姿态运动特征的人体骨架行为识别方法[4]与设计方法对运动行为进行控制,其中前者作为对照组、后者作为实验组。
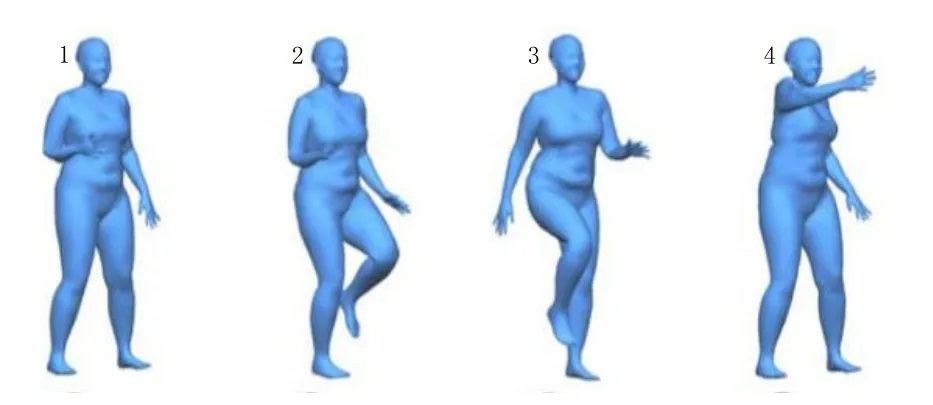
图3 健美操动态姿势
嵌入维数能够反映识别主机对于健美操动态姿势的捕捉精度水平,一般来说,嵌入维数值越小,则表明识别主机对于健美操动态姿势的捕捉精度水平越高,反之则越低。
下面将针对实验组、对照组的嵌入维数值展开深入研究。
分析图4可知,动作1、动作2的运动幅度相对较小,与之相关的嵌入维数值变化形式也较为简单,整个实验过程中,实验组、对照组曲线都保持着单一的上升变化状态,且实验组嵌入维数值的均值水平一直低于对照组。
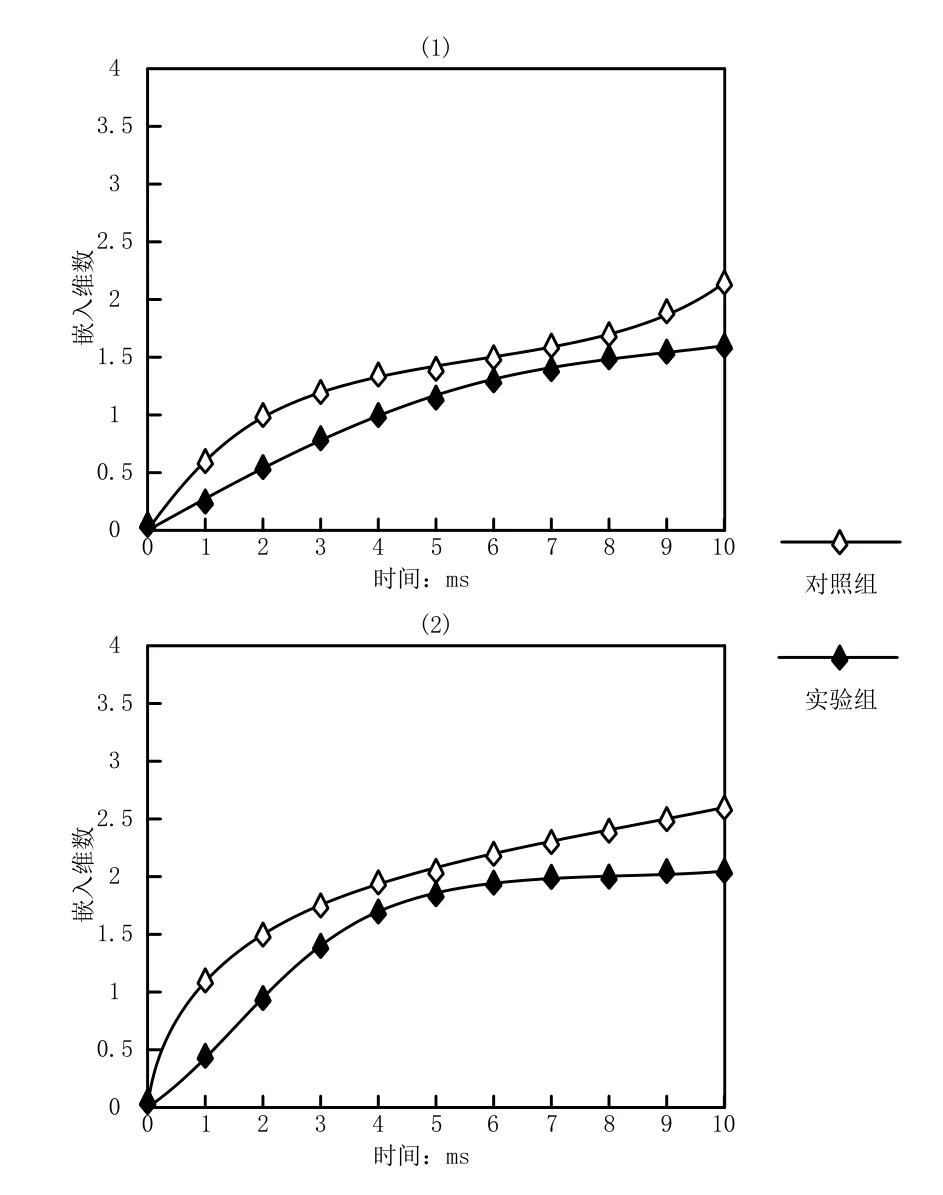
图4 动作1、动作2的嵌入维数值
分析图5可知,动作3、动作4的运动幅度相对较大,与之相关的嵌入维数值变化形式也就更为复杂。随着运动幅度的增大,嵌入维数的数值水平也会不断增大,但在整个实验过程中,实验组曲线始终存在于对照组曲线下部。

图5 动作3、动作4的嵌入维数值
为便于后续的实验操作,在对位姿数据识别时间进行检测时,规定关节角数值只能在1°至10°之间不断变化。具体实验情况如表1所示。
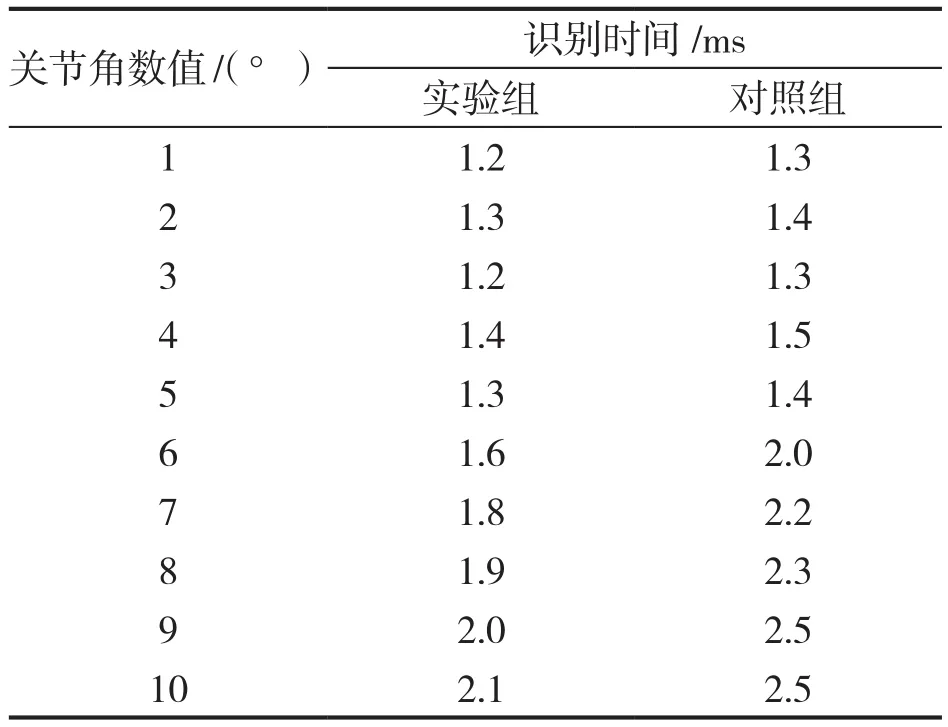
表1 运动位姿数据识别时间
分析表1可知,当关节角数值保持在1°至5°之间时,实验组、对照组运动位姿数据识别时长的变化趋势基本保持一致,只不过对照组时间均值水平略高。当关节角数值保持在6°至10°之间时,实验组运动位姿数据识别时长则出现连续上升的数值变化趋势;此时,对照组运动位姿数据识别时长出现先上升、再稳定的变化趋势,只不过对照组的均值水平明显高于实验组。
综上可知,随着基于深度学习算法的识别分析系统的应用,系统主机检测出的健美操动态姿势嵌入维数值水平虽然出现了一定程度的上升变化趋势,但无论位姿动作的简单与否,嵌入维数的数值水平都能得到较好控制,其平均值始终低于时空权重姿态运动特征型识别手段的检测数值,这对于精准捕获健美操动态姿势具有较强的促进性作用。在识别时长方面,随着关节角数值的增大,深度学习算法始终能够对精准识别健美操运动位姿数据所需时间进行有效控制,与传统时空权重姿态运动特征型识别方法相比,更符合实际应用需求。
5 结束语
在深度学习算法的支持下,本文设计的健美操动态姿势识别分析系统,可以通过整合动态姿势数据的方式对RBM系数的调节能力进行控制,再根据反馈微调原理,定义特化人体骨架模型。由于行为识别数据集结构的存在,信号特征提取结果能够直接影响与系统主机匹配的位姿数据捕捉能力。而且对于连续的健美操动作而言,设计系统始终能够较好控制嵌入维数值的表现情况,且当关节角变化幅度相对较小时,系统主机所需的运动位姿数据识别时间也始终较短。
猜你喜欢
沈阳航空航天大学学报(2022年3期)2022-11-08
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
计算机系统应用(2020年6期)2020-06-20
文苑(2020年5期)2020-06-16
小学生学习指导(低年级)(2020年3期)2020-06-02
山东工业技术(2019年16期)2019-07-19
小学教学研究(2018年6期)2018-09-04
学校教育研究(2017年30期)2017-08-13
读书(1985年6期)1985-07-15