海洋核动力平台定位系统多体动力学建模与分析1)
2022-06-16 05:50郭冲冲武文华吴国东曹光明吕柏呈
力学学报 2022年5期
郭冲冲 * 武文华 *, 吴国东 ** 曹光明 ** 吕柏呈
* (大连理工大学工业装备与结构分析国家重点实验室,辽宁大连 116024)
† (大连理工大学深圳研究院,广东深圳 518057)
** (武汉第二船舶设计研究所,武汉 430064)
†† (中国海洋石油有限公司研究总院,北京 100028)
引言
海洋核动力平台(见图1),是小型核反应堆与船舶工程有机结合而成的海上移动式核电站[1],主要为海洋石油开采、偏远岛屿和海水淡化供应能源,具有安全系数高和对海洋环境危害小等优点,被认为是海上能源供给最理想的方式[2].海洋核动力平台采用定位系统实现对平台的系泊定位.由于国内海工领域的定位系统没有浮式核动力平台的工程应用案例,现有定位系统的安全保障措施主要针对FPSO,因此开展针对海洋核动力平台定位系统的安全性能研究具有重要工程价值.

图1 海洋核动力平台Fig.1 Marine nuclear power platform
近年来,许多国家对海洋核动力平台进行了大量的设计和研究[3-5].如美国的OFNP-300/OPNP1100、俄罗斯的KLT-40/RITM-200 和法国的Flexblue[6]等.在中国,一些研究机构正在专注于海洋核动力平台的小型核反应堆设计,包括中核集团基于ACP100[7]设计的310 MWt ACP100 S 和中广核设计的200 MWt ACPR50 S.中船重工719 研究所则专注于系泊与船体的设计.针对海洋核动力平台定位系统的安全问题,国内外学者所开展的数值计算研究仍较为初步.章红雨等[8]采用数值方法对海洋核动力平台的耐波性进行了计算.梁双令等[9]采用频域数值方法研究了海洋核动力平台在不同波浪谱下的低频响应.端木晚露等[10]分析了海洋核动力平台的波浪载荷特性,采用设计波法对全船结构进行强度校核.另一方面,由于定位系统与油气平台的水上软刚臂系泊系统具有高度相似性,包括结构形式和功能原理,一些学者对其运动形式和受力传递进行了研究.范模[11]介绍了软刚臂单点系泊系统的工作原理,采用静力学分析了系泊系统结构特性.Sun 等[12]利用二维简化方法,推导了软刚臂系泊系统的动力学刚度,建立了系泊系统时域分析模型.李欣等[13]建立了软刚臂单点系统的Kane 动力方程,并与模型试验系泊力的对比结果吻合.Wu 等[14]基于Kane 动力学方法开发了渤海某FPSO 的系泊回复力监测系统,实现了对软刚臂单点系泊系统安全评估的工程应用.
海洋平台中存在大量多刚体系统,开展多体动力学分析能够为其性能评估和安全设计提供理论支撑.文献[15]利用多体动力学方法,对波浪发电设备开展了建模和动力学仿真.文献[16]将水上起重机作为多体动力学模型,讨论了流固相互作用的方法模型.Ha 等[17]设计了一种多体系统动力学仿真方法,对船舶和近海结构的建造和运输过程进行了模拟.Atipovic 等[18]基于线性化多体动力学方法,计算了水上浮式起重机的固有频率.文献[19]基于多体技术,研究了起重船的负载摆动问题.Rong[20]对近年来的动力学建模方法、计算策略、控制设计、软件开发以及多体系统实验进行了研究,并指出了该领域未来的研究方向.Rui[21]提出了一种新的多体动力学方法,并给出了该方法的公式以及一些多刚体系统动力学的算例,验证了该方法合理性.一些学者将多体动力学引入到FPSO 的系泊系统进行研究.Wang 等[22]将多体动力学仿真方法应用到FPSO 软刚臂系泊系统的耦合动力分析中.Lü等[23]提出了一种适用于FPSO 系泊系统多体动力学模型,并基于长期的监测数据对在役系泊系统进行了易损性评估.金锋等[24]基于软刚臂系泊系统的多体动力学模型,开发了祖冲之类方法的保辛数值积分算法,对于非线性系统具有较高的求解精度.但海洋核动力平台与FPSO 在结构和水动力学等方面存在一定差异.主要体现在海洋核动力平台搭载核动力装置,须要保证核安全要求[25];核动力平台需要满足500年一遇海洋条件,使用条件更加苛刻等.因此海洋核动力平台的设计重现期比同样采用单点系泊型式的FPSO 高.海洋核动力平台的船长船宽比L/B明显小于FPSO,因此其纵向扭矩表现比较突出,更容易出现弯扭耦合,在斜浪下其总纵载荷(纵垂弯矩、纵垂剪力)更危险为突出.由于船型差异,核动力平台与FPSO 水动力学性能不同,表现在响应幅值算子RAO 的幅值和峰值频率不同.所以针对海洋核动力平台的研究需要考虑两者的差异.同时关于核动力平台在设计海况下浮体运动时程构造、多体动力学模型分析以及系泊刚度特性等方面,还需要进一步研究.
本工作针对海洋核动力平台定位系统的多体动力特性开展分析,运用多刚体动力学理论,结合定位系统多铰连接的拓扑结构,建立定位系统的多体动力学控制方程.同时,考虑渤海多年一遇的设计环境条件,通过谱分析与线性叠加原理相结合的方法得到核动力平台六自由度运动时程.在此基础上,对设计海况下定位系统的多体动力特性开展评估,并与传统的准静力学模型和Kane 动力学模型进行对比分析.研究结果表明,本工作所开展的定位系统多体动力学计算可获得动力特性显著的系泊回复力与连接结构受力.本工作计算的动刚度曲线和提出的系泊回复力动力放大系数,可以为定位系统的工程设计和系泊能力评估提供辅助,具有较为重要的工程价值.
1 定位系统多体动力学模型
1.1 结构形式与模型化
海洋核动力平台通常依靠定位系统作为系泊装置保证其在某一固定区域作业.定位系统依赖于水上多铰连接方式,释放转动自由度,实现核动力平台的风向标效应,使得平台船体在风、浪、流等外界环境载荷联合作用下,位于合力最小的位置上.并通过压载水舱重力提供纵向回复力.
定位系统包括单点转塔,YOKE,左系泊腿,右系泊腿以及系泊支架.系泊支架与核电船固接.图2 为定位系统及其拓扑结构图.其中B0为单点转塔,B1为YOKE 刚臂,B2为左系泊腿,B3为右系泊腿,B4为系泊支架.
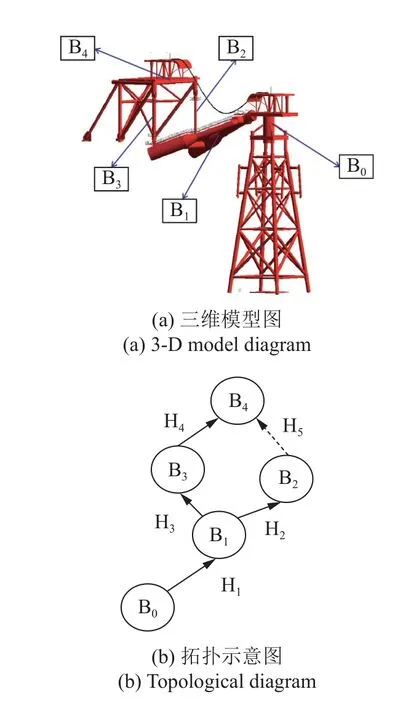
图2 定位系统动力学分析拓扑结构图Fig.2 Topology view of positioning system for dynamic analysis
定位系统由13 个铰节点连接.单点转塔与YOKE 连接处,由一个回转支承H12,一个旋转铰H11和一个滑环H13组成,释放了YOKE 绕转塔横摇、纵摇及艏摇自由度,限制了YOKE 横荡、纵荡及垂荡运动.多体动力学建模中将三个铰节点合并,其模型化为球铰,如图3 所示 .
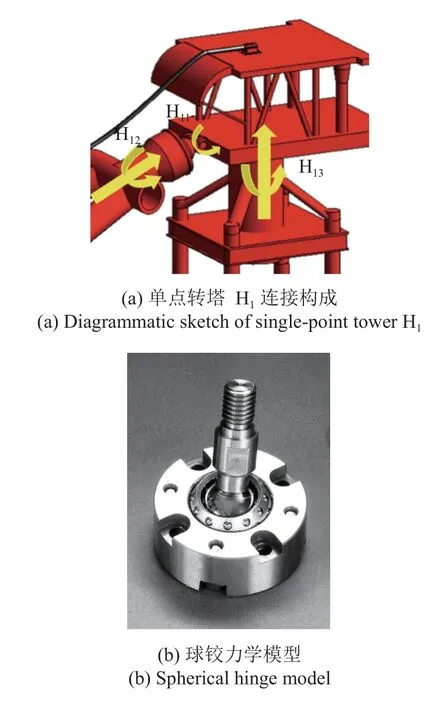
图3 单点转塔铰节点力学简化模型Fig.3 Mechanical model of the hinge joint in the single-point tower
两根系泊腿分别连接YOKE 和系泊支架.系泊腿下部铰节点由两个旋转铰组成,仅释放系泊腿横摇、纵摇的旋转自由度.在建模中系泊腿下铰节点分别模型化为胡克铰H2和H3,图4(a).系泊腿上铰节点由两个旋转铰H41,H42和一个止推轴承H43组成,释放系泊腿横、纵摇和轴向转动,两铰节点尺寸远小于系泊腿长度,在建模过程中将其模拟为球铰结构,图4(d).右系泊腿上铰节点为球铰H4,左系泊腿上铰节点为球铰H5.表1 给出了定位系统多体动力学模型各单体及各铰节点连接方式.
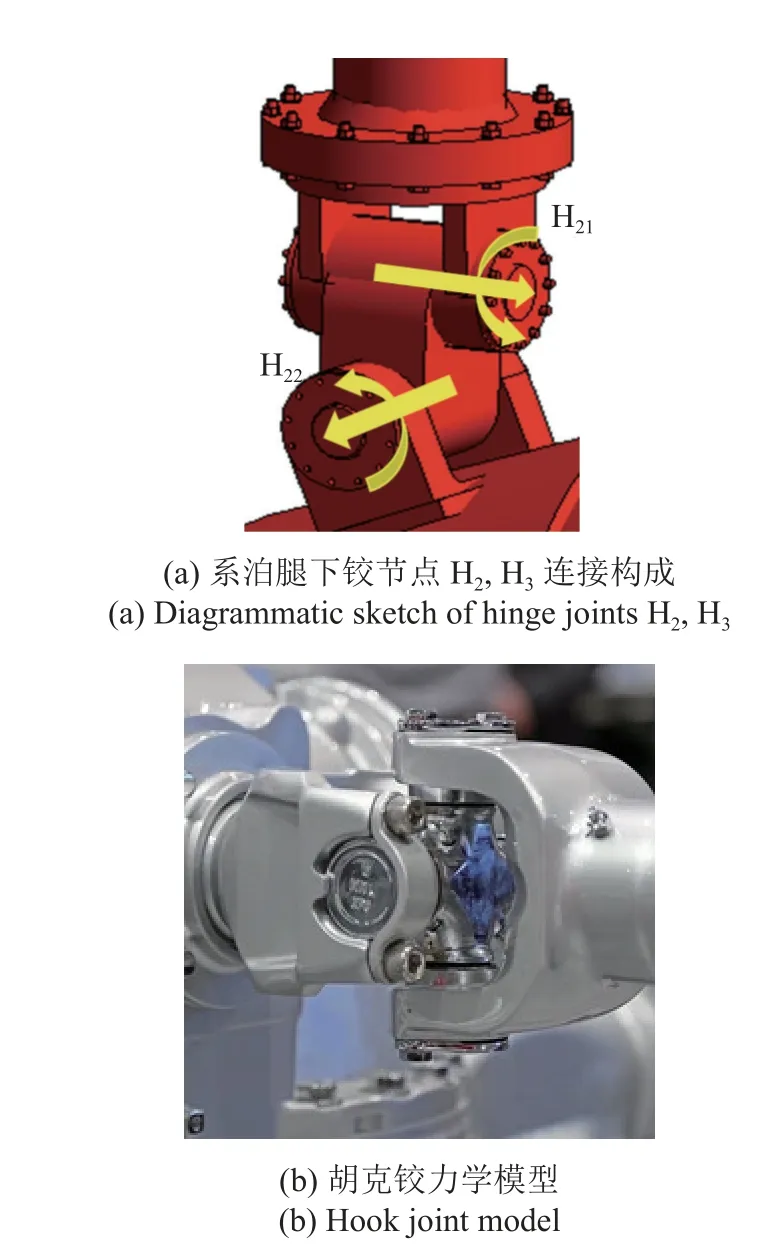
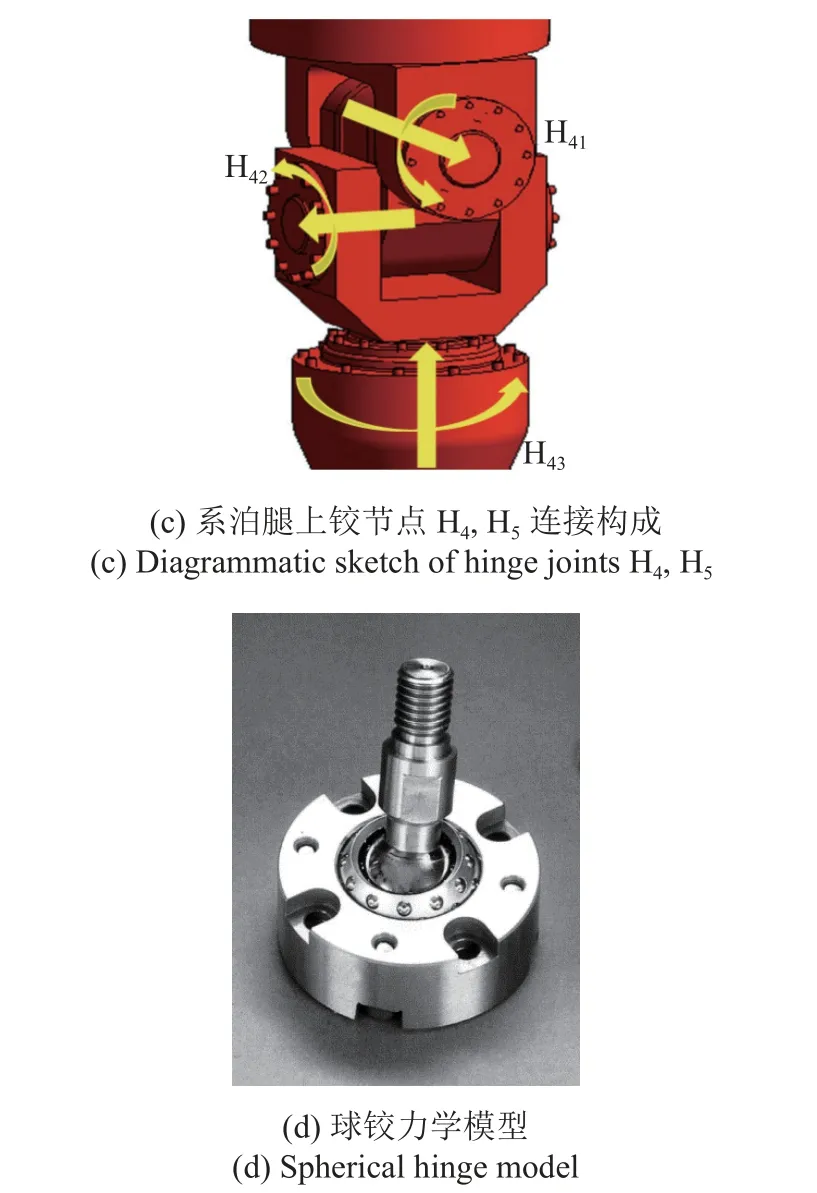
图4 系泊腿上下节点力学简化模型Fig.4 Mechanical model of hinge joints on mooring legs
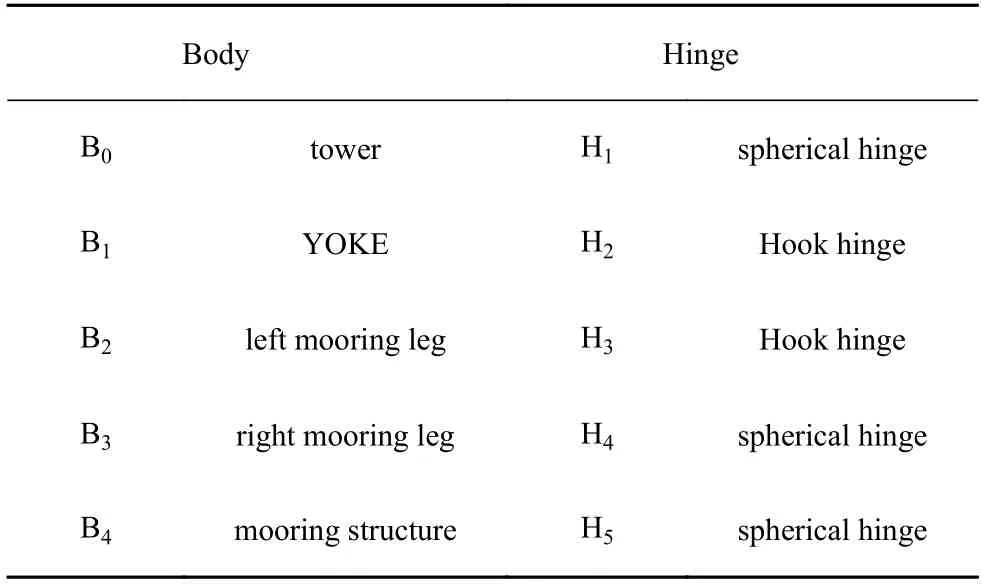
表1 定位系统各单体及铰接方式Table 1 Connection types of positioning system hinge structure
1.2 多刚体动力学模型
定位系统为典型的有根非树多体系统,而且为闭环多体系统.建模过程中,选择左系泊腿上铰节点H5进行切断,得到由5 个刚体,4 个铰组成的定位系统派生树系统.
定位系统在相对坐标方法下的广义坐标向量为

式中,YOKE与单点连接铰的转动角度为(q11,q12,q13),左、右系泊腿下铰节点的转动角度分别为 (q21,q22) 和 (q31,q32),右系泊腿上铰节点的转动角度为 (q41,q42,q43) .
定位系统中YOKE、左系泊腿、右系泊腿和系泊支架等各单体的随体坐标系分别对应
各铰节点转轴矢量为


式中,g1,g2,g3为大地坐标系基矢量.
定位系统各单体的质心位置和体铰矢量如图5所示,各单体质心位置表示为oi(i=0~ 4),物体i到物体j的体铰矢量表示为Cij(i=1~ 4,j=0~ 4).式(6)为各单体的质心位置矢量
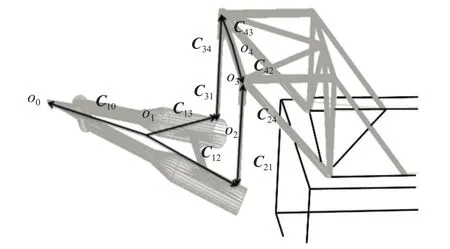
图5 定位系统体铰矢量Fig.5 Body-hinge vector of the positioning system
本文选取左系泊腿上铰节点H5作为切断铰,则与铰H5相连接的系泊腿和系泊支架相对位移为h5=r4+C42-r2-C24,为球铰H5相对位移的二阶相对变化率[26],可得定位系统相对加速度约束方程
式(7)可以改写成约束雅克比矩阵形式为

式中,Φ5为约束雅克比矩阵,t5为由广义速率引起的加速度.
由虚功原理可以得到定位系统的多体动力学方程为
式中,M为12×12 定位系统广义质量矩阵,F为系统的广义外力向量,λ 为拉格朗日乘子列向量.根据拉格朗日乘子的物理意义,λ =(F51,F52,F53)T为左系泊腿上铰节点的约束反力.由式(9)计算得到广义加速度计算公式为

为了便于核动力平台船体的运动信息输入到定位系统的多体动力学模型,建立定位系统多体动力学广义坐标向量与六自由度运动信息关系.通过式(11)求解定位系统切断铰方程广义坐标向量Q和广义坐标速度向量
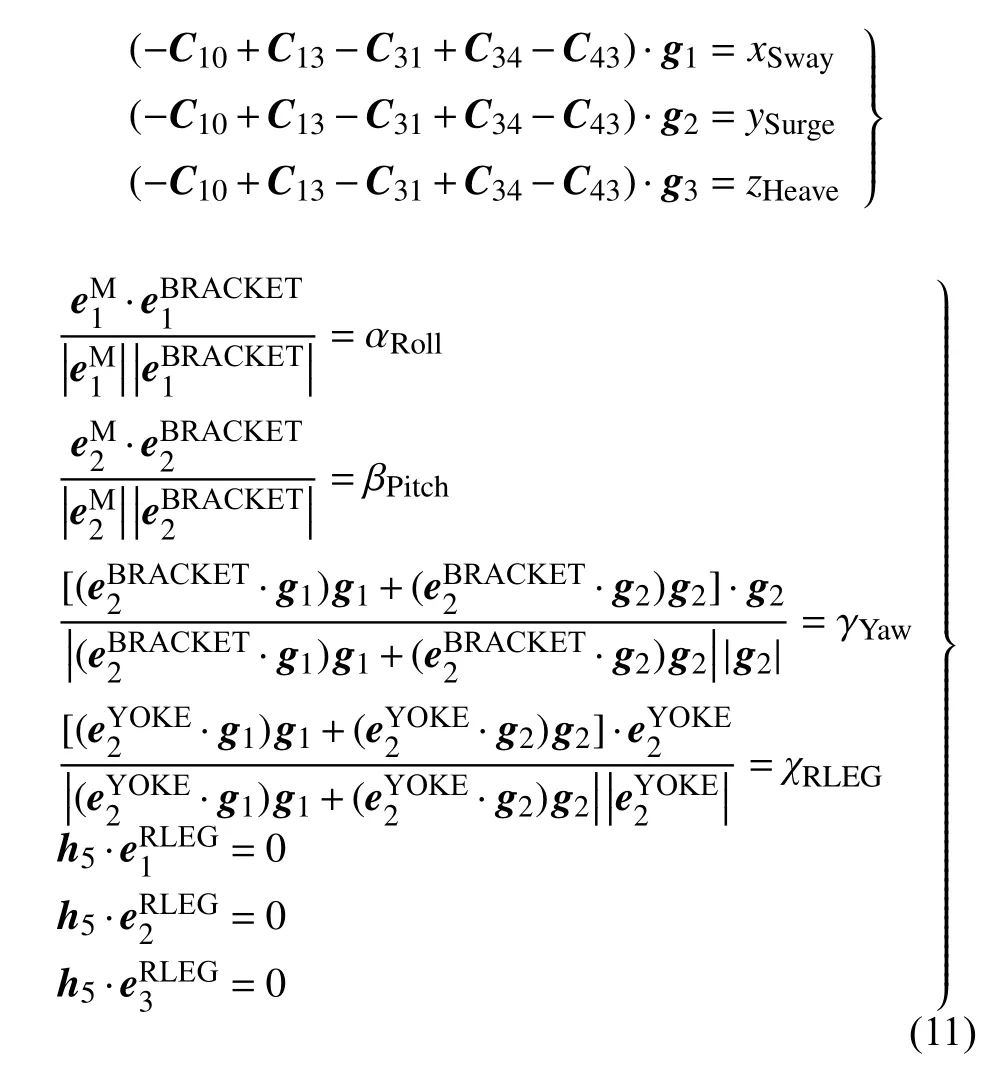
式(11)的第1~ 6 个等式为核动力平台船体的三个平动自由度和三个转动自由度方程,第7 个等
式为左系泊腿的横摆,第8~ 10 个等式为定位系统切断铰位置约束方程,各等式间相互独立.式(11)中xSway,ySurge,zHeave为核动力平台船体的横荡、纵荡和垂荡,αRoll,βPitch,γYaw为核动力平台船体的横摇、纵摇和艏摇,χRLEG为左系泊腿的相对横摆角度(一般依靠实测数据,文中给定初始默认值),,分别为核动力平台船体的随体坐标系基矢量在水平面的投影矢量.
因此,首先输入核动力平台六自由度信息,换算得到多体动力学系统广义坐标向量,对其进行一阶和二阶求导分别得到广义角速度和广义角加速度;其次,基于角速度叠加定理得到角速度,结合广义角速度和广义角加速度对角速度求导得到角加速度;然后,对质心的位置矢量求导结合角速度和角加速度可求得速度和加速度;最后代入到多体动力学方程(动力学方程和切断铰约束方程),得到切断铰约束反力,进而递推计算其他铰节点受力信息.具体的计算流程如图6 所示,采用MATLAB 软件编写计算程序.
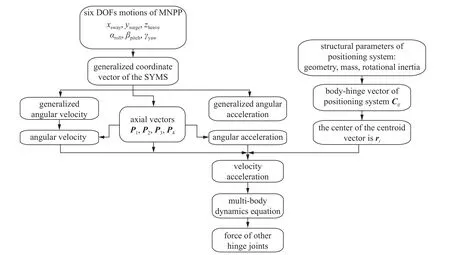
图6 计算流程图Fig.6 Computing process
2 基于线性叠加原理的船体六自由度时程
为了验证定位系统多体动力学模型的正确性,选择设计海况下核动力平台的六自由度信息进行分析.所以本节利用JONSWAP 谱与线性叠加原理相结合的方法,计算海洋核动力平台在设计海况下的六自由度响应时程,进而对定位系统进行多体动力学计算.
2.1 六自由度响应谱
由于海浪是随机的、不规则的,在实际工程分析中常使用波浪谱对不规则波进行描述.因此选择适合海洋核动力平台设计作业区域的波浪谱计算不规则海况,工程上常用的波浪谱有JONSWAP 谱、P-M 谱等[27].本文采用JONSWAP 谱为计算目标谱,以某极端海况参数为例(表2),拟合得到海洋核动力平台设计作业海域的JONSWAP 波浪谱值如图7 所示.
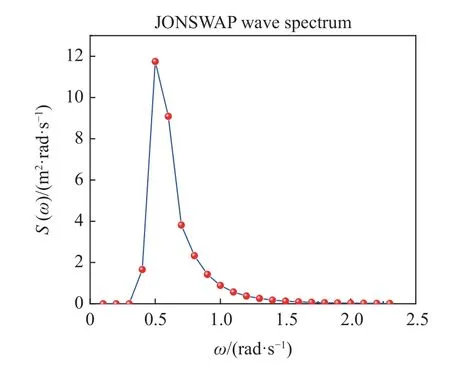
图7 JONSWAP 波浪谱Fig.7 JONSWAP wave spectrum

表2 某极端海况设计环境条件Table 2 Design environmental conditions of an extreme sea state
基于三维辐射绕射理论,计算海洋核动力平台在单位波幅规则波上的响应,从而得到对应一系列频率规则波的船体六自由度响应传递函数[28],即响应幅值算子RAO.由于海洋核动力平台的系泊特性,单点转塔使得船体始终处于迎浪状态.本文通过商业水动力软件AQWA 计算得到海洋核动力平台在浪向角180°下的响应幅值算子,图8 为海洋核动力平台在迎浪条件下的六自由度RAO

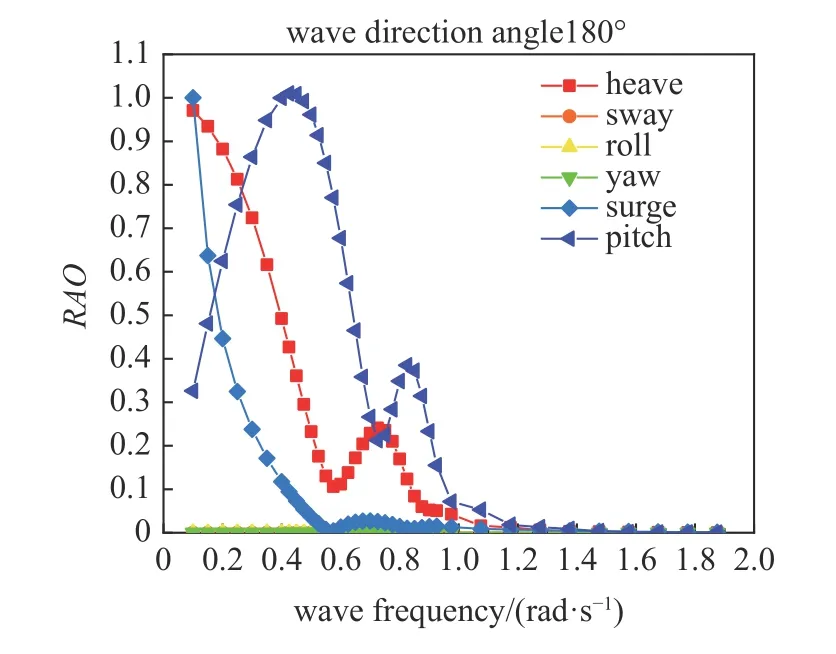
图8 海洋核动力平台6 自由度RAOFig.8 6-DOF RAO of nuclear power platform
式中,Am(ω) 为某波浪频率下核动力平台的六自由度运动幅值,Aw(ω) 为某波浪频率下的单位规则波幅值.
海洋核动力平台的六自由度响应谱是将响应幅值算子RAO(式(12))和波浪能量谱SW(ω) 通过谱分析方法计算而得到[29]

式中,SR(ω) 为海洋核动力平台六自由度运动响应谱.
2.2 六自由度时程
一些学者[30]把线性叠加原理引进到船舶的摇荡运动研究中来.将海浪(不规则波)看做一平稳随机过程,由许许多多波长、波高、频率或周期不同的正弦或余弦规则波叠加而成.因此海洋核动力平台对不规则波的响应等于构成不规则波的各成分波单独响应之和,这样通过线性叠加得到总的响应

式中,j=1~ 6,分别代表6 个自由度分量:垂荡、横荡、纵荡、艏摇、横摇和纵摇;ηj(t)为第j个分量在t时刻的M个响应的瞬时幅值总和;为第i个成分响应的振幅; ωi为第i个成分响应的圆频率;εi为第i个成分响应的初相位,一般取(0,2π)范围内均布的随机数.
设定模拟的靶谱(海洋核动力平台响应谱)SR(ω) 的能量绝大部分分布在 ωL~ωH范围内,其余部分可以忽略不计,把频率范围划分成M个区间,其间距 Δ ω=(ωH-ωL)/M,取
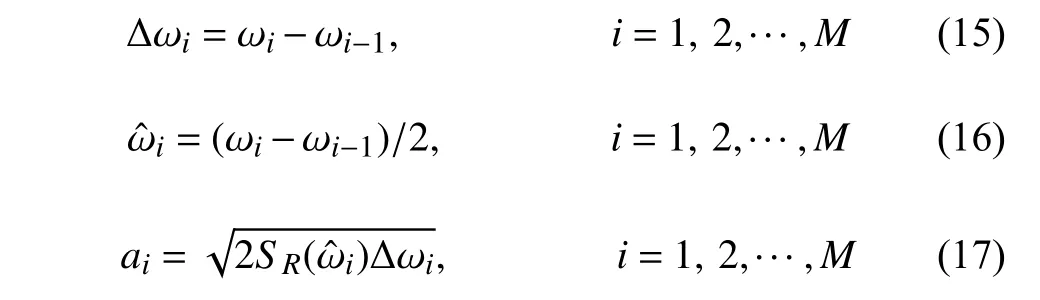
式中,Δ ωi为第i个频率区间;为第i个区间内圆频率的中值.
将代表M个区间内的M个余弦响应叠加起来,即可得到核动力平台六自由度运动时程

3 算例分析和结果讨论
3.1 多体动力学模型参数
基于核动力平台定位系统的结构参数,可得到表征定位系统多体动力特性的控制方程.平台主要参数如表3 所示.定位系统各单体的质量、质心位置以及转动惯量等参数信息见表4.
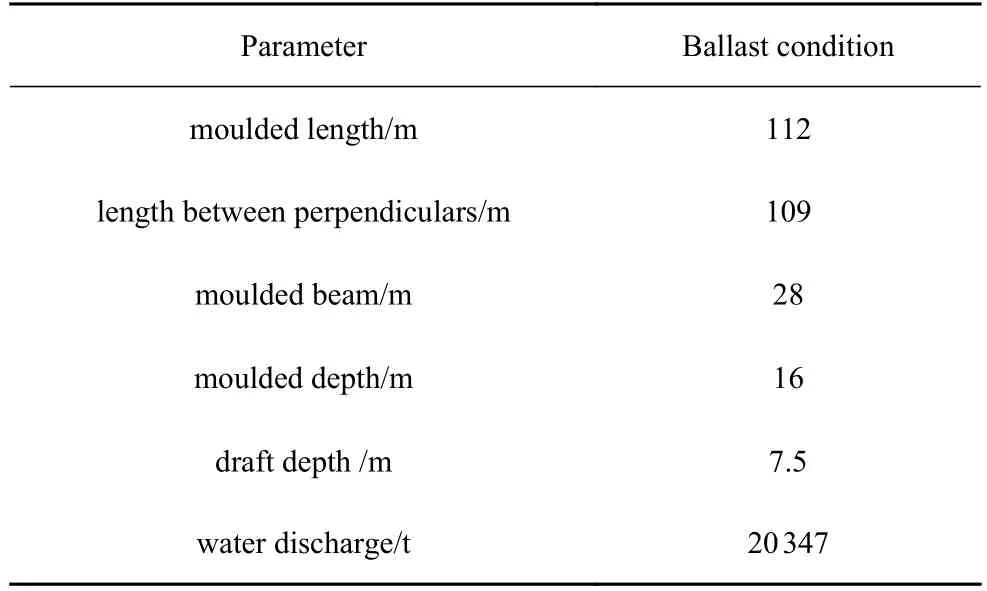
表3 海洋核动力平台主要参数Table 3 Major parameters of nuclear power platform
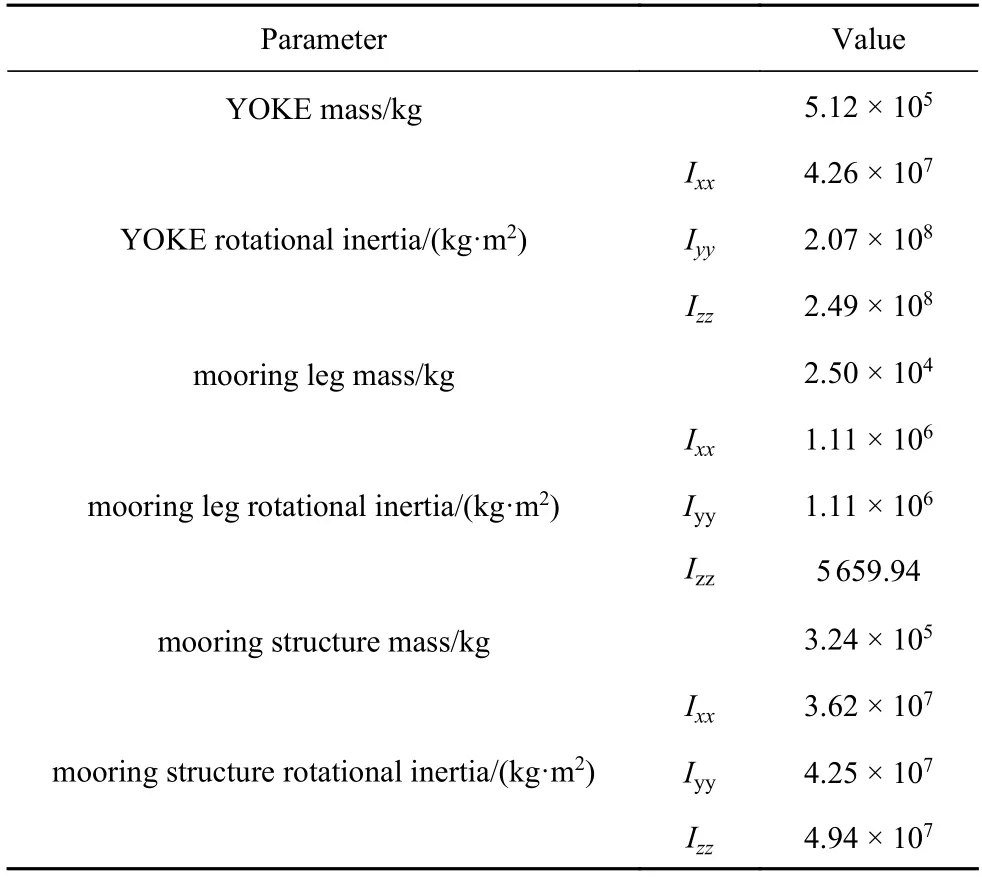
表4 定位系统主要参数Table 4 Major parameters of the positioning system
3.2 渤海设计环境条件
海洋核动力平台设计作业区域渤海(海域水深20 m 左右)的设计环境参数[31]如表5 所示.

表5 渤海设计环境条件Table 5 Design environmental conditions of Bohai Sea
现以表5 渤海设计环境条件参数,拟合得到JONSWAP 波浪谱值如图9 所示.
从图9 可以看出,波浪是窄带随机过程,在JONSWAP 波浪谱中频率很小和频率很大的组成波提供能量很小,能量主要由一狭窄频率带内的组成波提供.同时,JONSWAP 波浪谱的能量随着海况重现期标准的提高而显著增大.
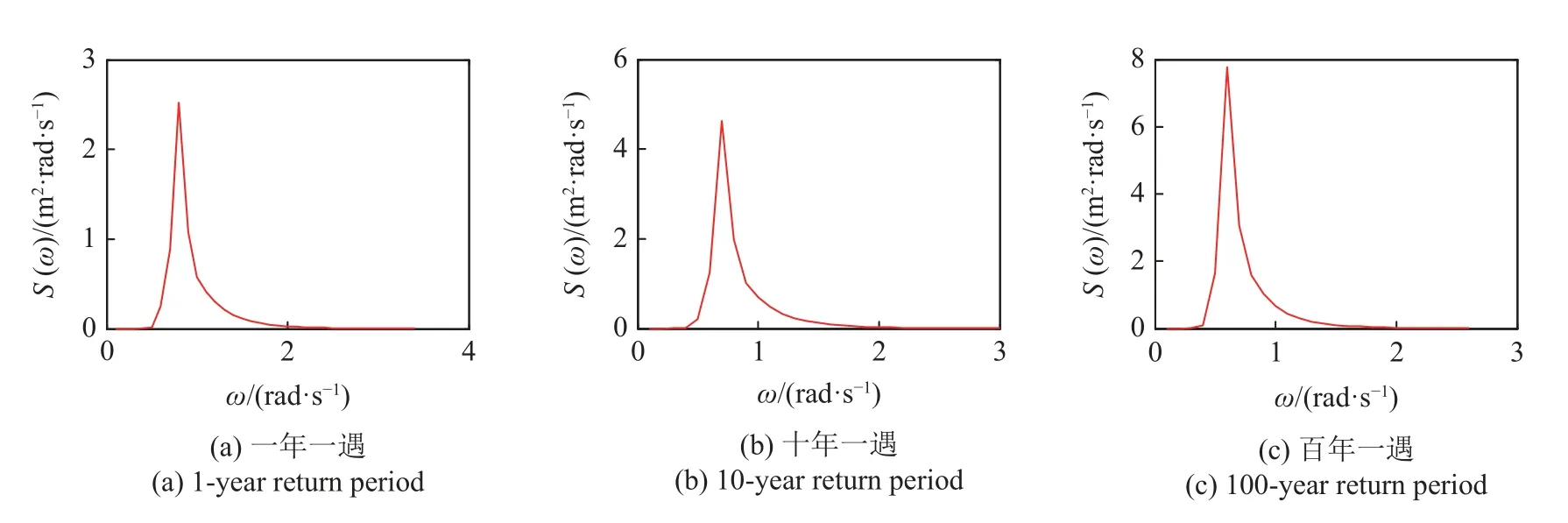
图9 多年一遇重现期拟合的JONSWAP 波浪谱Fig.9 JONSWAP wave spectrum with multi-year return period
3.3 结果分析
3.3.1 系泊回复力与动力放大系数
根据定位系统多刚体动力学模型,结合设计环境下核动力平台响应时程,对定位系统的受力行为进行分析.计算一年一遇、十年一遇和百年一遇海况下,海洋核动力平台定位系统在不同力学模型下的水平系泊回复力(两根系泊上铰节点沿水平方向的合力),计算结果如图10~ 图12.图13 为不同重现期海况下不同力学模型计算得到的水平系泊回复力均值对比.
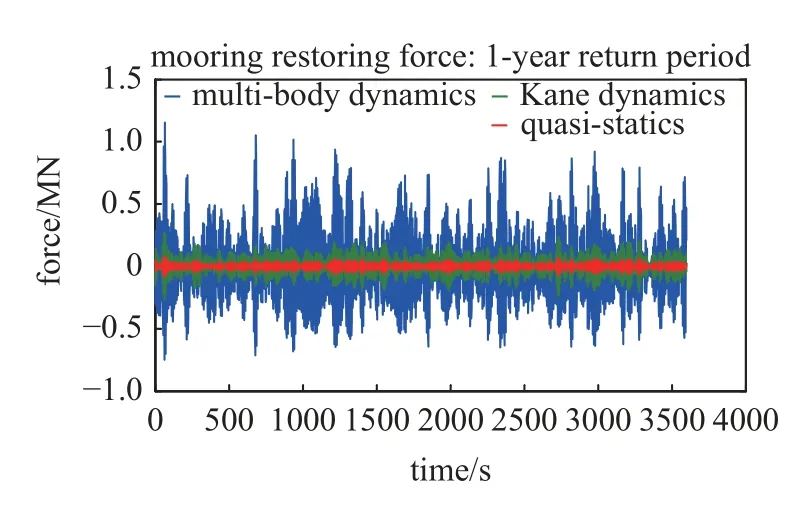
图10 一年一遇水平系泊回复力Fig.10 Mooring restoring force of 1-year return period
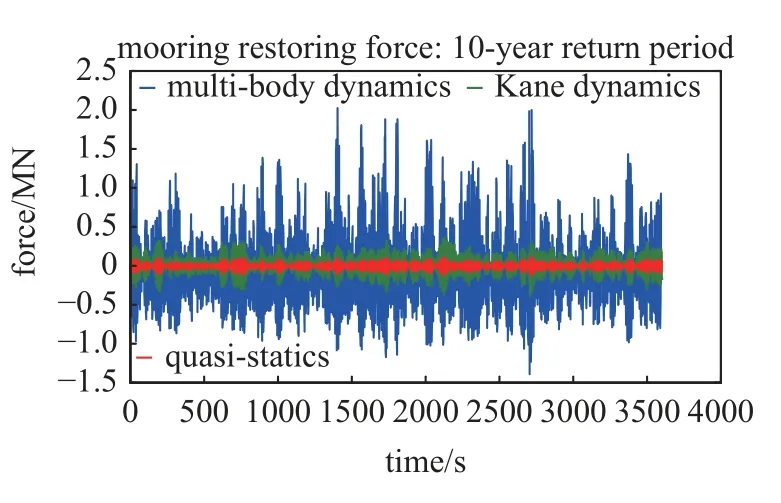
图11 十年一遇水平系泊回复力Fig.11 Mooring restoring force of 10-year return period
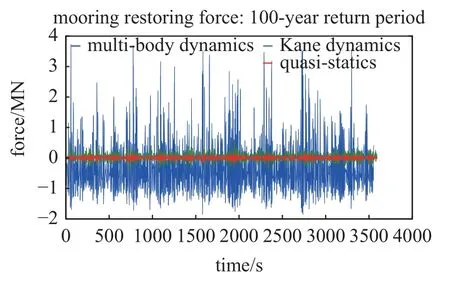
图12 百年一遇水平系泊回复力Fig.12 Mooring restoring force of 100-year return period
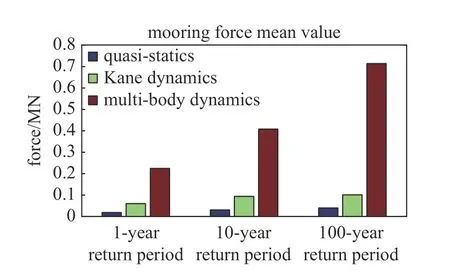
图13 不同重现期海况水平系泊回复力均值对比Fig.13 Comparison of mean values of mooring restoring force in different multi-year return periods
由图10~ 图12 可以看出,在同一海况重现期下,Kane 动力学模型相较于准静力学模型的计算结果具有明显的动力效果,多体动力学模型相较于Kane 动力学模型的计算结果具有显著的动力效果,说明了在定位系统力学建模中考虑三维拓扑空间的必要性;同时,准静力学模型与Kane 动力学模型计算幅值的数量级为105N,而多体动力学模型计算幅值的数量级为106N,说明在极端海洋环境下准静力学模型和Kane 动力学模型计算得到的结果偏小,无法反应定位系统的真实动力响应,对于海洋核动力平台的工程设计而言偏于风险.在不同海况重现期下,随着标准期的提高,定位系统的水平系泊回复力显著增加,从一年一遇的1.1 MN 增大到百年一遇的4.0 MN,因此须重视对高重现期海况下定位系统系泊结构的安全校核.
由图13 可以看出,多体动力学模型计算结果随着重现期标准越高而增大,真实的海况输入与准确的定位系统力学模型对于计算结果都至关重要,本文所建立的多刚体动力学模型能够准确描述定位系统的受力行为.
将动力学模型计算的水平系泊回复力最大值与静力学模型计算的水平系泊回复力最大值的比值定义为反映定位系统动力特性的动力放大系数.计算不同的海况重现期下Kane 动力学模型与多刚体动力学模型的水平系泊回复力动力放大系数,见表6.
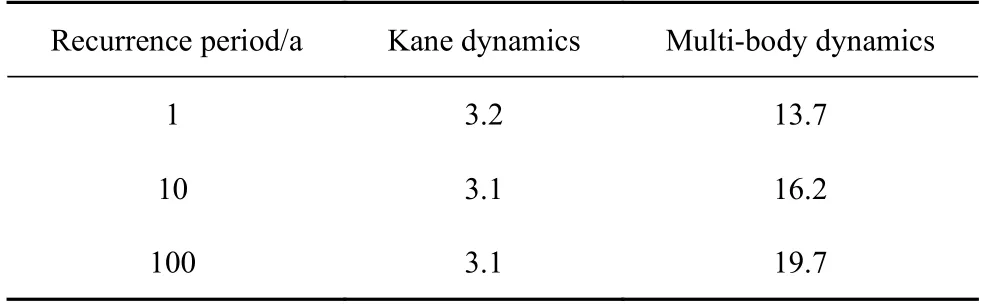
表6 水平系泊回复力动力放大系数Table 6 Mooring restoring force dynamic magnification factor
可以看出,在同一海况重现期下,多刚体动力学模型相较于Kane 动力学模型的动力放大系数显著增大,说明多刚体动力学模型能够较为全面反映定位系统三维空间拓扑结构的动力效应;在不同的海况重现期下,Kane 动力学的动力放大系数稳定在3.1 左右,而多刚体动力学的动力放大系数随着海况重现期标准的提高而明显增加,从一年一遇的13.7 增大到百年一遇的19.7,说明剧烈海况会加剧多刚体动力学的动力放大效应.同时,在传统的静力学分析附加安全因子的海工校核方法中,定位系统水平系泊回复力的动力放大系数可以为安全因子选取提供理论参考.
3.3.2 系泊回复刚度
计算海洋核动力平台偏离平衡位置不同位移处的水平系泊回复力,即得到核动力平台在准静力学和Kane 动力学模型下的系泊回复刚度,本文以纵向位移0~ 8 m 为例,如图14 所示.与准静力学和Kane 动力学模型的系泊刚度有解析解不同,多刚体动力学模型在求解时采用数值积分方法,因此只能得到多刚体动力模型系泊刚度的数值解.计算一年一遇、十年一遇和百年一遇海况下多刚体动力模型系泊回复刚度曲线,如图15 所示.
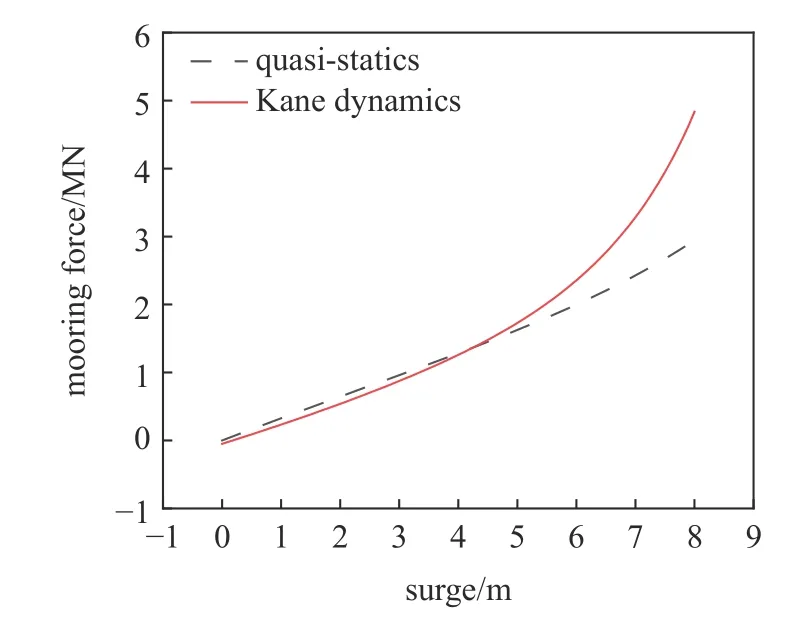
图14 准静力模型[12]和Kane 动力学模型[14]系泊回复刚度Fig.14 Mooring restoring stiffness curve of quasi-static[12] and Kane dynamic[14] models
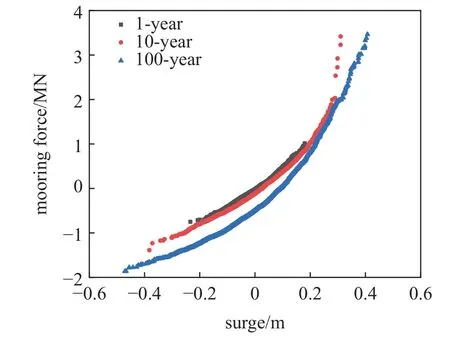
图15 不同重现期海况多刚体动力学模型系泊回复刚度Fig.15 Mooring restoring stiffness curve of multi-body dynamic model in sea conditions of different return periods
从图14 可以看出,在纵向位移0~ 5 m 范围内,准静力学模型与Kane 动力学模型计算的系泊回复刚度曲线吻合度良好;当纵向位移大于5 m 时,Kane 动力学模型计算的系泊回复刚度曲线显著增大.准静力学模型的水平系泊回复力与纵向位移基本呈现线性关系,其系泊回复刚度曲线的斜率为3.68 × 105N/m;而Kane 动力学模型的水平系泊回复力与纵向位移呈现非线性关系,特别是纵向位移较大时更加明显,说明当核动力平台在出现大幅运动时,基于准静力学的系泊回复刚度无法反应定位系统的本构关系,对于定位系统的刚度设计带来了危险性.
从图15 可以看出,在同一海况重现期下,多刚体动力模型的系泊回复刚度曲线具有显著的非线性特征,且纵向位移越大系泊回复刚度的斜率越大;在不同的海况重现期下,可以参考图中系泊回复刚度曲线计算定位系统的受力与运动响应.
根据图14 和图15 的计算数据,本文近似给定等效线性回复力系数,见表7.
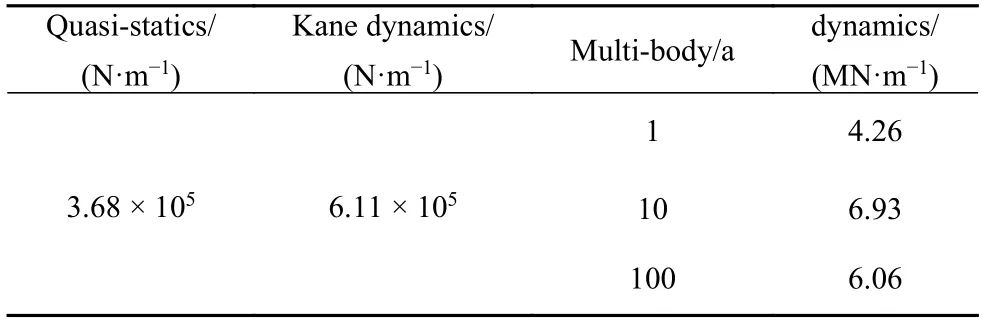
表7 等效线性回复力系数Table 7 Equivalent linear restoring force coefficient
3.3.3 连接节点受力
铰和轴承等连接结构是定位系统的核心连接部件,实现系泊回复力的传递,并且多铰组合的连接形式使得定位系统具有柔性特质,共同完成多自由度的耦合机械运动.因此,铰节点的受力状态直接关系到定位系统的系泊安全.基于多体动力学的递推算法可以建立定位系统各单体的动力学方程,依次由图3 中的B4,B3,B2,B1,B0逐一进行动力学计算,从而得到各连接结构的受力信息.以100 年一遇海况为例,计算了定位系统单点转塔的受力时程,如图16所示(X为横荡方向;Y为纵荡方向;Z为垂荡方向).图17 左系泊腿下部铰节点受力信息(其他铰节点受力图不再列出).各连接节点的受力统计特征值见表8.各连接结构受力均值对比情况如图18 所示.
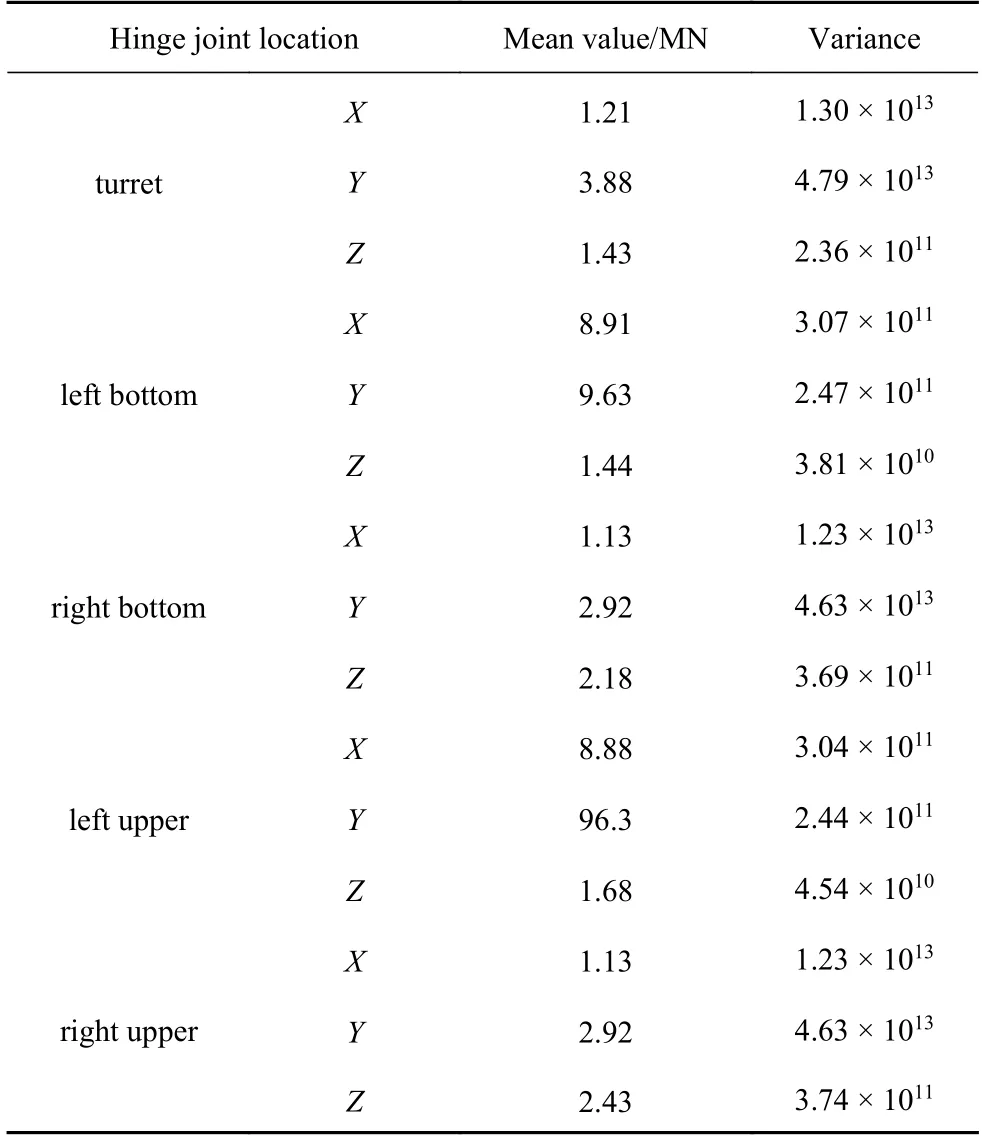
表8 连接节点受力统计特征值Table 8 Statistical characteristic value of hinge structure
从图16 和图17 可以看出,多刚体动力学模型可以得到定位系统各铰节点在X方向受力时程,可以解决Kane 动力学模型在定位系统横荡方向简化导致的受力缺失.同时,各铰节点在其他方向受力时程可用于后续的强度校核与疲劳评估.
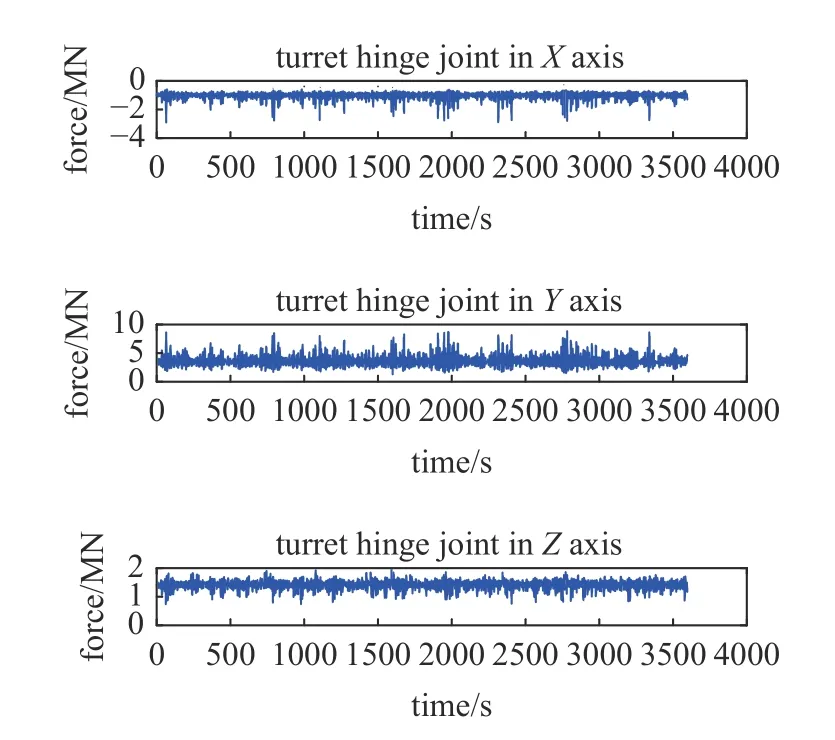
图16 单点转塔受力信息Fig.16 Single point turret force
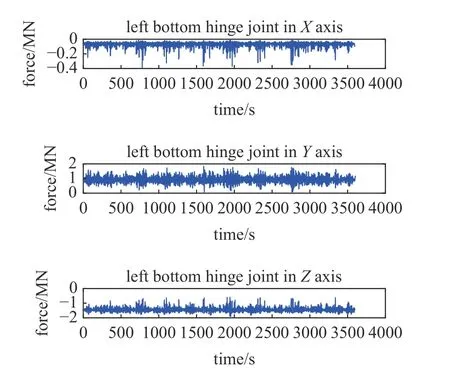
图17 左系泊腿下部连接节点受力信息Fig.17 Left mooring leg bottom hinge structure force
从图18 可以看出,左系泊腿上部连接节点与右系泊腿上部连接节点Y方向受力之和为4.0 MN,约等于单点转塔Y方向受力,说明了定位系统纵向整体受力的合理性.但同样可以发现,定位系统的对称连接结构(左右系泊腿的上下连接节点)的受力并非完全对称一致,其中左右系泊腿上部连接节点Z方向受力均值分别为1.68 MN,2.43 MN,左右系泊腿下部连接节点Z方向受力均值分别为1.44 MN,2.18 MN,说明在Kane 动力学建模过程中将左右系泊腿简化为一个刚体是不合理的,而本文提出的多刚体动力学模型考虑了左右系泊腿在运动受力过程中不一致性.
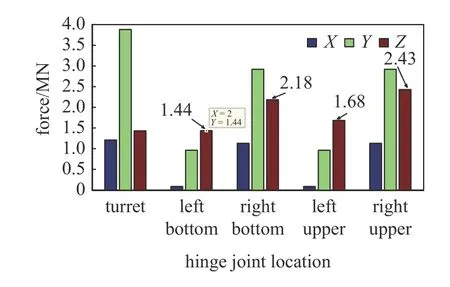
图18 各连接结构受力均值对比Fig.18 Comparison of mean force of each hinge structure
核动力平台船体在波浪载荷下进行升沉运动,即垂荡(Z方向),连接节点在Z方向承受周期性交变载荷,极易造成疲劳损伤,影响平台定位系统结构安全.针对左右上铰节点Z方向受力的频谱分析,如图19 和图20 所示.可以看出,两节点受力的频率主要集中在0.1 Hz,这与百年一遇设计海况谱峰周期Tp的10.3 s 相对应,验证了多体动力学节点受力在频域范围内的合理性;同时,波频运动是引起连接节点交变载荷的主要因素,应关注左右上连接节点的疲劳损伤情况.
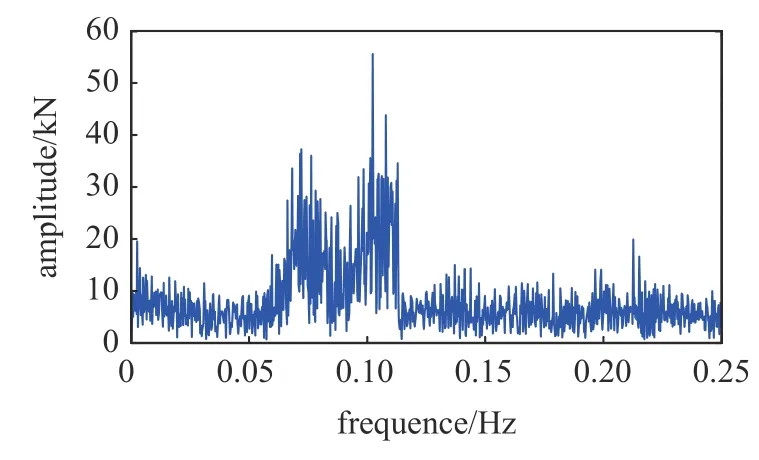
图19 左上铰节点受力频谱图Fig.19 Force spectrum of left-upper hinge structure
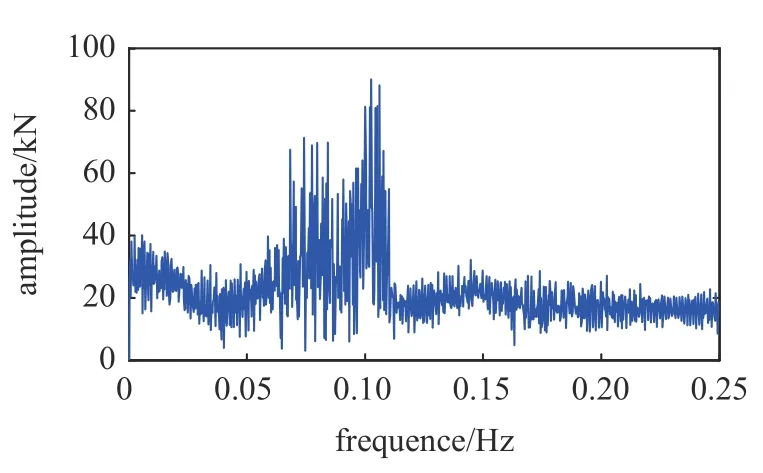
图20 右上铰节点受力频谱图Fig.20 Force spectrum of right-upper hinge structure
4 结论与讨论
本文提出了海洋核动力平台定位系统多刚体动力学模型,通过谱分析与线性叠加原理相结合的方法计算了海洋核动力平台在设计海况(一年一遇、十年一遇和百年一遇)下的六自由度响应时程,并代入到多体动力学模型与准静力学模型和Kane动力学模型进行对比分析,主要结论如下.
(1)对比于准静力学模型与Kane 动力学模型,多体动力学模型得到水平系泊回复力具有显著的动力效果.同时,提出了系泊回复力动力放大系数的概念,多刚体动力学的动力放大系数随着海况重现期标准的提高而明显增加.
(2)多刚体动力学模型计算的系泊回复刚度曲线具有显著的非线性特征,且纵向位移越大系泊回复刚度的斜率越大,其等效线性刚度幅值的数量级为106N/m.
(3)计算了定位系统各连接结构的受力行为,验证了定位系统纵向整体受力的合理性.同时,发现定位系统对称连接节点位置(左右系泊腿的上下连接结构)的受力并非对称一致.
本文的研究还存在一些不足,如设计海况计算时尚未考虑二阶运动响应计算,主要以一阶RAO 为主;算例计算中尚未考虑平台运动响应传递函数中的相频特性,构造的时程只是在功率谱的统计特征上满足设计海况;由于输入量左系泊腿横摆需要实测数据,算例只进行了六自由度信息的输入,以后将对该问题做进一步改进.
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
国际太空(2021年8期)2021-11-05
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
神剑(2021年3期)2021-08-14
船海工程(2021年1期)2021-03-02
船舶(2021年1期)2021-03-01
少儿科技(2021年10期)2021-01-20
科研成果与传播(2020年3期)2020-03-19
广东造船(2018年4期)2018-10-09
科技经济市场(2017年2期)2017-05-22