仿生足式管道机器人结构设计
2022-06-19 15:46郭霆王毅王策刘帅克刘书豪
科技创新导报 2022年3期
郭霆 王毅 王策 刘帅克 刘书豪







摘要:随着城市不断发展,原始管道与新增管道组成了规模庞大复杂的管网,使得管道管理、养护等方面问题突出。对于长期布置在地下的管道存在大量对人体有害气体,若出现断裂损坏不仅不利于人工进行排查,还会对环境造成污染。基于上述原因,本文拟设计一仿生足式管道机器人,用于地下管道破坏点的检测与排查,利用红外线摄像头或者声波盘查管道损坏处。对机器人各个关节尺寸进行了设计,并校核机械结构强度,使得机器人能够独立行走进行勘测。
关键词:仿生足管道机器人结构强度环境勘测
Pipeline Robot’s Structural Design of Bionic Foot
GUO Ting1WANGYi2WANGCe1LIUShuaike1LIU Shuhao1
(1. Heilongjiang Institute of Technology, Harbin, Heilongjiang Province, 150050China; 2. Alibaba local life, Harbin, Heilongjiang Province, 150001, China)
Abstract:The original pipeline and the new pipeline have formed a large and complex pipe network, which makes the pipeline management, maintenance and other issues prominent with the city continuous development. There are a lot of harmful gases to human body in the pipeline that is arranged underground for a long time. If some of pipelines are fracture damaged, it is not convenient for manual investigation and will also cause environment pollution. This paper intends to design a bionic foot pipeline robot, which is used for the detection and investigation of underground pipeline damage points, and the pipeline damage inspection by infrared camera or acoustic wave. Each joint size of the robot is designed, and the mechanical structure strength is checked, so that the robot can walk independently for survey.
Keywords The bionic foot; Pipeline robot; The structural strength; The environmental survey
近些年,我國诸多城市均出现了内涝、路面塌陷等问题,给社会带来了很大的干扰,基于此,国家颁布了相关文件以应对这一问题,加速了地下管道工程的研究进展。目前,我国的地下管道维护60%都依赖人工,30%都运用进口设备,现在我国自己产的设备只能达到10%。故仿生足式管道机器人的研究被提上日程[1-4],让机器人来帮助人们进行工作,在管道里面进行勘测管道的一些破损和疲劳损坏,这样就有着很大的意义。机器人自己需要承载很多的检测设备等设施,要保证机器人有很强的结构强度,在设计管道机器人的时候一定要考虑到外部环境的因素。
目前,常用于可以辅助人类进行管道检测的机器人有轮式管道机器人和多足爬行的管道机器人。轮式机器人缺点是轮子会对管道的内壁有摩擦且受到环境的阻碍;仿生足式机器人可在相对复杂的环境下进行检测;多足机器人一般是两足、四足、六足,研究表明,六足机器人由于肢体冗余优势使得其步姿更平稳,使多足机器人更容易适应空间探索等工作。现在研究的六足机器人大概有70多种,由于六足机器人都工作在比较复杂或者地下的环境内,人们希望其控制系统能够更加灵活,并且具有更大的自主性,仿生足式机器人的足与足之间需要特别好的配合,行走的时候需要进行步态的规划,所以机械足之间的配合也是需要进行研究的。
仿生足式管道机器人的机械足相对离散,在地面支撑面积较小,因此无论机器人所在环境地形多么复杂,只要选择好机器人的支撑点,仿生足式机器人就可以正常行走。因此,本文拟对仿生足式管道器人进行研究,设计其仿生足的机械结构和驱动力,并对仿生足式机器人总体结构强度进行校核。
1仿生足式机器人研究现状
相比于常用的轮式机器人,仿生足式机器人具有与地面接触面积小,行动灵活的特点,对于管道的压迫损伤相对较小。美国通用电气公司设计制作了首台四足电控步行车[5]。日本早稻田大学开发了一系列双足机器人[6-9]。目前在多足机器人研发相对成功的有美国波士顿动力公司开发的大狗(如图1)、猎豹、野猫等一系列机器人,主要用于美军方。麻省理工学院实验室在20世纪90年代初期研制出实验室第一个用来替代人们进行行星勘测的六足机器人;2001年波士顿的东北海洋大学自主研制一用于管道勘测的六足机器人蝎子(如图2)。
与发达国家相比我国机器人研究起步相对较晚。哈尔滨工业大学研制了一系列的双足仿人步行机器人;国防科技大学研制的仿人机器人;北京理工大学的双足机器人,能够进行太极等武术表演。在多足机器人研究方面,国内主要是哈尔滨工业大学、上海交通大学(如图3)、国防快科技大学和山东大学共同参与的研制项目,主要用于核电救灾。
对于多足式机器人而言,主要研究方向是基于仿生学的步态轨迹规划、基于能量的步态轨迹规划、基于零力矩点的轨迹规划,机器人的运动稳定性及机器人的运动控制策略和方案。目前的研究难点在于管道机器人都是带着电缆进入管道,管道内环境比较恶劣,像石油和天然气管道电缆的存在对机器人的运动有较大的影响。管道或管道壁对信号具有屏蔽作用,反馈信号会影响管道机器人的工作,管道里是非平坦路面,这就要求机器人具有跨越障碍能力。
2 仿生足式管道机器人机械结构设计
对于表面极其不规则的情况,要选择合适的支撑点来支撑仿生足式机器人的总体结构,使得仿生足式管道机器人能够平稳行进,同时需要机器人具有良好的重心位置,重心过低会影响机器人的通过能力。因此本文选用多关节机构来提升仿生足式机器人的运动能力及柔韧性,该机构不具有明显奇异点并且相对简单的结构能够保证后续的扩展性,关节与连接件固定,关节均由电机进行驱动,这样可以管道内灵活行走。运用STM32单片机来进行机器人及传感器的控制。
2.1 仿生足式管道机器人机械结构
根据仿生学的知识,这种仿生足式管道机器人的腿部结构分为底座部、股部和小腿三个部分,初步设定基节长为48mm,股节长为75mm,胫节长为142mm。本文通过多关节机构来实现管道机器人的直线行进以及转向功能。管道机器人的每个关节均由单独的舵机进行控制,这大大拓展了机器人的运动自由度,使得管道机器人具有更灵活的运动性能,适应更复杂的工作,同时也大大提升了控制系统设计的简易型和通用性,关节的活动范围为-90~90°,设计时加入一个减速器来提升电机的输出功率。管道机器人的本体部分采用近似正圆的结构,能够避免机器人相邻机械足的碰撞,并且有效提升管道机器人的稳定性,如图4所示。
管道机器人的本体选择直径为200mm的圆形结构,仿生足式机器人站立时高约为67mm,机器人相邻两足间距为60°,并且具有3个自由度,分别由3个独立的电机进行驱动,机器人与机械腿相连的位置由一个电机提供绕Z轴转动的自由度,机器人小腿位置自由度采用电机相连刚性相连的方式,最后在关节内加上一个伸缩机构,使得机器人能够进行末端伸长运动,同时为了提供更稳定的支撑能力,在仿生足底装配有吸盘装置,能够为机器人工作提供稳定性。
2.2 仿生足式机器人传动齿轮设计
由于管道机器人质量相对较小,因此齿轮选择PVB材料即可,选择7级齿轮精度,小齿轮的齿数Z1=16,传动比i=1.5,大齿轮齿数Z2=24,压力角 。
点蚀是导致传动中齿轮损坏的重要原因,因此根据齿面接触疲劳强度及齿跟的弯曲强度进行校核有:
(1)
式中:齿宽系数 , ,小齿轮传递的扭矩为 。
计算两个齿轮并进行对比,选择最大值带入公式(其中 , )有:
, (2)
按小齿轮进行齿根弯曲疲劳强度设计,则:
(3)
圆周速度为:
(4)
设计传动齿轮的几何参数及计算公式如表1所示。
2.3 轴的结构设计
根据之前计算的舵机扭矩本文选择45号钢作为轴的制作材料。
(5)
式中, 表示轴上的传递扭矩,值为: 。许用切应力 。代入式(5)得到轴的直径为3mm。
2.4 管道机器人舵机选择
舵机是壳体、核心板、电机、小齿轮的组合。以控制基板的信号传输到转向齿轮,通过IC控制板判断旋转方向,启动驱动电机核心并通过减速器驱动舵机。仿生足式管道机器人的六足利用电机驱动方式,采用微型直流角位移伺服电机、DC电机、减速齿轮、电位计以及控制电路。驱动信号为脉冲信号,转角及其宽度之间呈线性关系,为了保证电机各个方向自由运动则需保持舵机的初始位置时候为90°,以便控制机器人腿部的前进和后退。根据所需要的扭矩选择FUTUBA系列S15转向器。
3、仿生足式管道机器人三维建模
本文运用三维实体建模软件Unigraphics(UG)进行仿生足式管道机器人的模型建立,并呈现出相关不见的连接关系。UG是常用机械自动化设计工具,设计过程中可以进行特征尺寸和约束的建立,限制结构的位移和转角,完成整体模型的仿真工作。仿生足式管道机器人总体三维建模如图4所示。选用18个电机装置来控制整个管道机器人的总体运动,包括转动和伸长运动,由于采用三角步态运动,故机械足之间的运动是相同的,为了使得管道机器人具有更高的灵活度须采用18个电机进行控制。
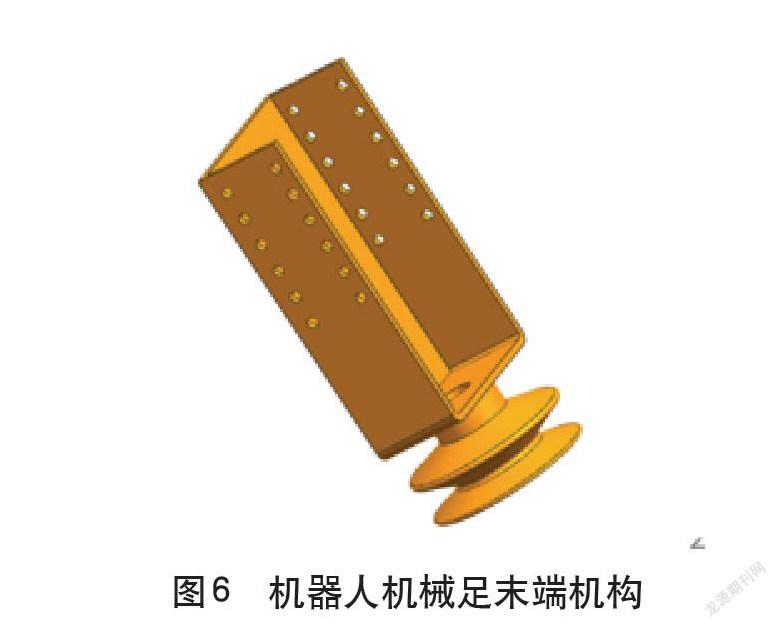
管道机器人机械足及机械足末端位置如图5、图6所示。管道机器人机械足第一个自由度通过转向齿轮驱动前后摆动及旋转,管道机器人机械腿第二个自由度,通过转向齿轮的驱动实现关节上下运动,第三个自由度由转向齿轮控制通过关节束缚来回移动。机械足末端可以实现伸缩运动,能够提升机器人重心并增加通过性,并且机械足末端采用吸盘装置,提高适应性和稳定性。
4 结语
本文主要对仿生足式管道机器人的机械结构进行了设计。设计管道机器人为六足可伸缩式,能够实现管道坏点勘测并通过加载模块化设备进行数据的存储,可伸缩的设计使得机器人能够有效避免管道内残余液体对机器人本体结构的损坏。仿生足式管道勘测机器人是一个新兴的多学科领域,许多关键技术亟待解决和完善。
参考文献
[1] 肖厚普,蒋一阳,郝方铭,等.四足机器人的腿部设计与步态规划的研究[J].2021(3):275-276.
[2] 康杰,汤文成,沙鑫美,等.四足机器人腿部机构运动学分析与实现[J].机械设计与制造,2021(11):270-278.
[3] 刘玉炜,赵琳.全地形六足仿生机器人控制系统设计[J].产业与科技论坛,2021,20(22):39-40.
[4] 刘博.井下探测机器人的应用和设计要点[J].科技资讯,2020,18(1):57,59.
[5] 刘润晨.混联腿足式四足步行机器人的运动学建模与步态规划研究[D].济南:山东大学,2020.
[6] 付博.四足机器人动态稳定性分析及运动控制研究[D].哈尔滨:哈尔滨工业大学.2010.
[7] 贾王强.基于SEA的足式机器人单腿结构设计及控制研究[D].哈尔滨:哈尔滨工业大学.2015.
[8] 谢绍川,余祖龙,曾杰,等.基于無线智能控制的六足仿生机器人[J].科技资讯,2010(18):1.
[9] 徐海钦,张宏伟,梅学雪,等.一种伸缩支撑式双目无线管道探测机器人的设计与实现[J].科技资讯,2020,18(2):18-19,21.
猜你喜欢
内燃机工程(2021年6期)2021-12-10
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电机与控制应用(2021年12期)2021-02-28
当代工人(2020年8期)2020-05-25
制造技术与机床(2017年3期)2017-06-23
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25