面向科技竞赛的自动控制搬运小车设计
2022-06-19 21:41吴羽歆赵振伟陈思羽王海琛张力文张悦
科技创新导报 2022年3期
吴羽歆 赵振伟 陈思羽 王海琛 张力文 张悦

摘要:本文基于单片机keil和Arduino技术,设计、制作并控制一台起重机器人,对中国大学生创新类比赛的实际赛况线路控制,做了较为详细的技术分析。本设计采用OpenMV作为识别标识的前端输入部件,Arduino与单片机为控制元件,通过利用Arduino与单片机串口通信来实现车体移动,单片机控制钩取装置和其他连接元件实现精准识别取物,保证重物摆放位置的精准性,实现全自动化。
关键词:搬运机器人 控制系统 单片机 Arduino PID
Design of automatic control handling trolley for science and technology competition
WU Yuxin,ZHAO Zhenwei,CHEN Siyu,WANG Haichen,ZHANG Liwen, ZHANG Yue
(School of mechanical engineering,Shenyang University of Technology,Shenyang, Liaoning Province, 110870,China)
Abstract:Based on the keil and Arduino technology of single-chip microcomputer, this paper designs, manufactures and controls a crane robot, and makes a detailed technical analysis of the actual circuit control of the innovation competition of Chinese college students. This design uses OpenMV as the front-end input component of the identification mark, Arduino and single-chip microcomputer as the control components, and realizes the movement of the car body by using the serial communication between Arduino and single-chip microcomputer, and the single-chip computer controls the hooking device and other connecting components to achieve accurate identification and retrieval, ensuring heavy objects. The accuracy of the placement position is fully automated.
Key Words:Handling robot; Control system; MCU; ArduinoPID
中国大学生起重机创意大赛是由中国机械工程学会主办的“中国大学生机械工程创新创意大赛”系列专业赛事之一,其宗旨是通过大赛增强大学生的科技创新意识,鼓励大学生积极投身科技创新与工程实践活动,提高大学生针对实际需求进行起重机设计和工艺制作的动手能力,拓宽大学生的科技创新视野,提升大学生对起重机在国民经济各领域的应用意识。2020年中国大学生起重机创意大赛成为全国创新人才培养与学科竞赛评估排名赛事之一。
大学生科技竞赛是培养创新型人才的重要手段[1]。大学生科技竞赛中的自动控制搬运小车,采用机器视觉、步进电机、伺服电机、自动控制等技术[2-5]。搬运小车的设计为参加中国大学生起重机创意大赛,要求设计、制作一台起重机器人,基于机器视觉,对固定取物区具有特定颜色及形状标识的搬运物品进行识别,通过自主有序的控制方式将物品从取物区按通行规则通过设置有两个障碍物的通行区搬运到堆码区,期间不得触碰障碍物圆柱体,搬运物品的最底面不能超过障碍物的最高端面,完全堆完6个箱子即完成比赛。
1搬运小车的机械结构设计
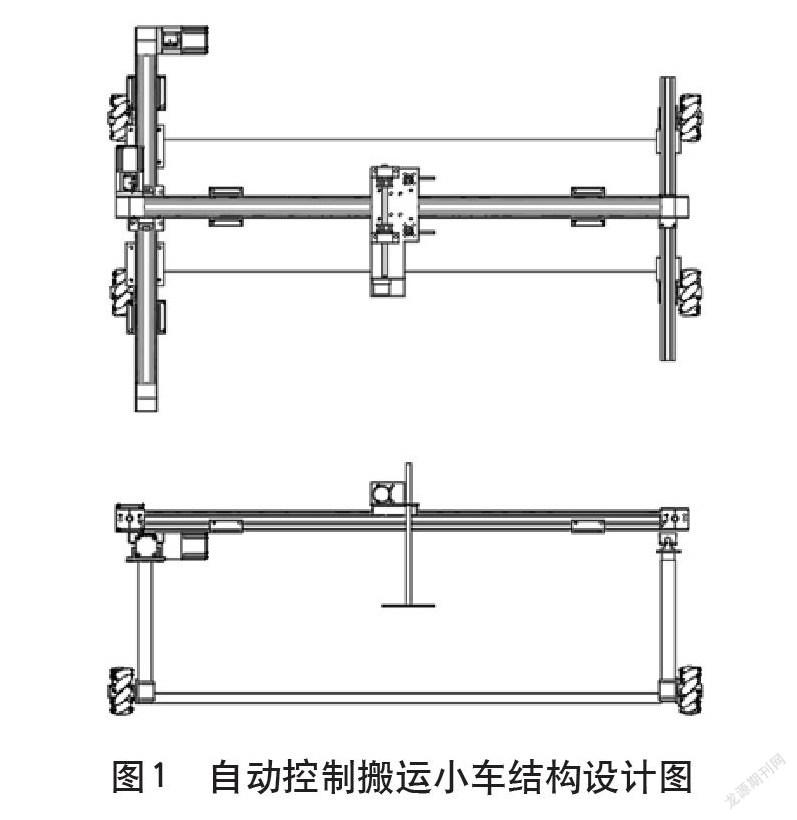
搬运小车整体呈方形框架,上方为车体抓取部分,下方为车体移动部分。所述车架的四角分别设有空心铝方管,4根空心铝方管的上端均安装有支撐座,一对所述支撑座上设置有同步带模组,另一对所述支撑座上设置有光轴,同步带模组和光轴上另设有另一个同步带模组,同步带模组上设有步进电机,用于驱动同步带模组;同步带模组上设有随同步带板一起移动的立体板,用于放置驱动电机,所述车架的四角安装有步进电机,该步进电机的输出端设有麦克纳姆轮,为搬运小车运动机械结构;钩取结构中横杆的两端设置有一对竖杆,钩取装置形状成一个“工”字形。自动控制搬运小车结构设计图如图1所示,自动控制搬运小车结构建模图如图2所示。
2控制系统
2.1 OpenMV识别校准
在摄像头捕捉到标识图标,在机器视觉中的阈值编辑器调阈值参数,将其反馈的阈值参数编入OpenMV程序中[6-8]。若最后OpenMV的串口打印输出与实体标识不一致,则为阈值参数调整不到位,需要进一步调整参数阈值。在调试过程中,因为有其他物体的干扰,所以在调试中将OpenMV的镜头识别范围调小,前后挪动镜头的固定位置,取该区间的阈值范围作为最终数据。特别需要注意竞赛场地光线的影响,由于打印的标识反光度比较大,在摄像头识别标识时候需要人工进行光线遮挡,以避免影响后续抓取。
2.2步进电机控制
当单个调整钩取装置得到的电机反馈的圈数数据直接用于整体机械运行,可以看见单个部分调整与整体调整的圈数是不一致的。出现这个问题的原因是整体运行时各部分分布的电压的不同,可以通过微调受影响的零部件参数进行调整。该搬运小车的同步带采用的驱动器是雷赛智能的M542C高细分驱动器,一个M542C驱动器控制一个步进电机,在Signal接口中,采用的共阴接法[9-10]。B22B7373-4DEC-4753-A110-A474BB5AF2DF
该搬运小车的步进电机驱动器程序设计需要定义方向信号和脉冲信号的引脚。步进电机是一种将电脉冲转化为角位移的执行机构。电机的旋转是以固定的角度一步一步运行的。通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。本程序设定需要间隔设定初始化引脚,以控制一定时间的脉冲个数达到控制速度的目的;以调整脉冲IO口的GPIO_ResetBits与GPIO_SetBits函数间隔时间来调整速度大小。
2.3伺服电机控制钩取装置调试
本文所设计搬运小车的取物方式为钩取,本钩取装置的动力源为伺服电机。伺服电机的控制原理是通过控制脉冲时间的长短控制转动角度。钩取物品需要较为精准的伸缩位移和适宜的电机速度,所以在控制程序上采用“速度+位置PID双闭环”的方法来实现精准控制钩取位置。为了使钩取物体的时候保证物体不滑落和到达指定距离时候维持钩取稳定,需要观察传输至PC端的数值尝试多个值细微调整电机的转速和刹车距离来确保钩取物体的有劲与稳定。
伺服电机需要用PMW波控制的,所以在控制程序上设定使能PMW的IO口;使能时钟TIM4并设定定时器TIM4的中断服务函数,为计算电机旋转路程做准备;设定电机的编码器模式,初始化IO口和定时器TIM3;设置基础PID的计算函数,确保PID闭环精确控制速度与距离。控制电机正反转程序一起并入PID的程序,便于设计钩取装置以位置环为主,速度环为辅,把位置值采回去给单片机CPU,CPU把这个采集回来的实际位置和设定位置做比较,若实际数值小,就通过控制信号让电机继续正转,若实际数值大,就通过控制信号让电机反转。
2.3四驱步进电机驱动板控制车体运动
驱动板的上层为设计的电路板用于连接DRV8825驱动器和下层的Arduino控制板。上层电路板接通24V电源,通过电路板中的电容降压到5V来控制驱动器,驱动器为64细分,能较为精准控制电机移动量。Dir函数?来控制步进点击的正反转,以达到控制?辆前进、后退等功能;Step函数表示电机转的路程,Step函数根据控制?低电平的次数达到输出稳定的脉冲个数,脉冲个数代表了电机可以?进的位移;Speed函数?来表示电机的转速。
3搬运小车整体调试
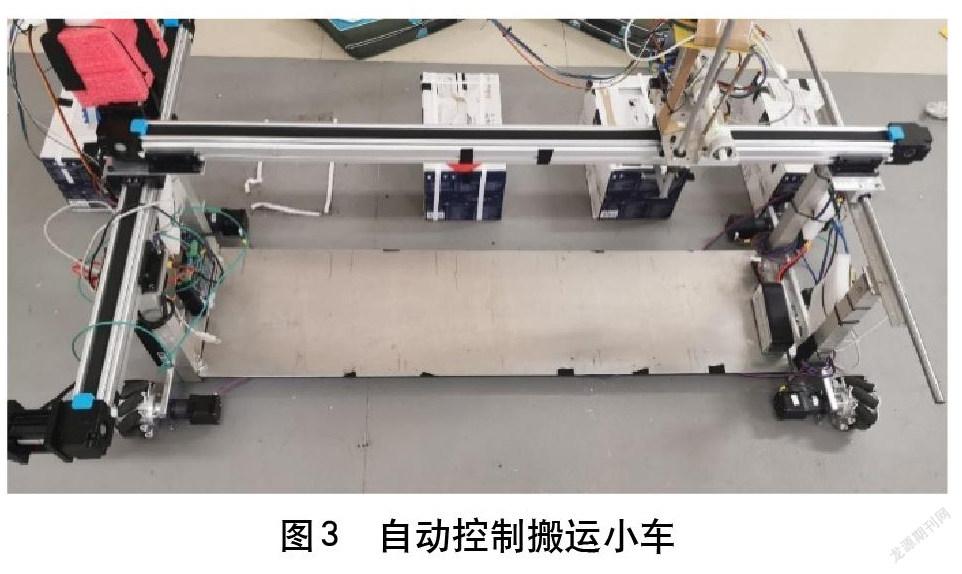
在整体调试的时候,搬运小车出现了程序运行乱套问题。最初调试时,一个单片机串联所有设备,在程序过渡时,控制轮子的步进电机不动,且伺服电机未能闭环反而开始乱转。经过多方面排除,初步怀疑步进电机四驱步进电机驱动板通过单片机发出的信号干扰伺服电机接收。将四驱步进电机驱动板单独出一个单片机但与同步带同电源,干扰仍存在,查阅资料后怀疑四驱步进电机驱动板通过同电源的电源线产生电磁进行干扰。最后将同步带与四驱步进电机驱动板分开电源,干扰消除。当伺服电机与步进电机共同运转时,需要独立单片机控制和独立电源供电来消除相互干扰。自动控制搬运小车如图3所示。
4 结语
基于OpenMV图像处理算法和竞赛中的比赛规则设计并实现了竞赛型起重机的运动。设计了新型起重机通过设计钩子的种类,解决了重物不稳定的问题。通过串联摄像头与电机之间的关系,实现了重物摆放位置的精准性,并且实现了全自动化,全程只需人工进行启動此机构。通过OpenMV识别标识并与主控制板通信,主控制板与四驱步进电机驱动板的通信,实现整体起重机的按比赛要求进行移动、钩取的运转。中国大学生起重机创意大赛,以起重机工程应用为牵引,充分融合了结构、控制、智能及机械加工技术,作品新颖性强、实用性高。通过大赛增强大学生的科技创新意识,提高大学生针对实际需求进行起重机设计和工艺制作的动手能力,扩宽大学生的科学视野。比赛中通过汇聚行业学会专家、知名企业代表、高等院校学者等一系列学术竞赛交流活动,激发出当代大学生的潜力,提高了大学生工程创新创业能力和工程实践能力,是行业、企业、高校之间知行并举、协同育人、产学合作的一次有益探索,为培养一流工程创新人才不断改革创新。
参考文献
[1] 李翠英,苏盈盈,刘金晟.以竞赛为平台培养大学生专业创新能力的实践[J].科技资讯,2020(4):235-236.
[2] 李振宇.基于Arduino技术的光电搬运机器人设计与编程(一):循线技术与线路控制[J].首都师范大学学报:自然科学版,2021,42(4):8-11.
[3] 李华文,倪骏,程倩.浅谈基于CPLD的G.D伺服的抗干扰系统设计[J].中国设备工程,2021(9):95-96.
[4] 白永威.基于CPLD伺服系统的速度测量及抗干扰技术[D].沈阳:沈阳工业大学,2017.
[5] 韩利虎.浅谈步进电机的基本原理[J].内蒙古石油化工,2007(11):240
[6] 贺龙豹.竞赛用搬运机器人的设计与实现[D].南京:南京财经大学,2013
[7] 刘学文.基于stm32单片机的智能小车控制[J].现代制造技术与装备,2019(1):192-193..
[8] 董期林,周晓东,马媛,等.基于模糊自整定PID控制器的直流电机伺服系统的仿真研究[J].机床与液压,2009,37(2):117-119.
[9] 张辉,李应岐,方晓峰.机器人空间三点圆弧的圆心算法及MATLAB实现[J].科技资讯,2021(15):21-23.
[10] 郭勤,蔡亚永.智能小车控制系统的设计与实现[J].电子测试,2021(11):25-26B22B7373-4DEC-4753-A110-A474BB5AF2DF
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
科教导刊·电子版(2016年26期)2016-11-21
电子设计工程(2015年15期)2015-02-27