运用倾斜摄影测量技术精细提取新疆皮山县地质构造定量参数*
2022-06-23 05:09蔡小超唐红涛
地震研究 2022年3期
蔡小超,唐红涛
(1.河南水利与环境职业学院,河南 郑州 450002;2.中国地震局第二监测中心,陕西 西安 710054)
0 引言
在地质构造研究工作中,特别是针对活动构造,需要精确获取构造地貌的定量参数,如断层陡坎坡度角、断错面貌垂直位移、活动构造长度等信息,从而分析、揭示地质构造运动规律和地震发生机理(邓起东等,2004;艾明等,2018)。在地质构造定量参数的获取中,皮尺丈量、全站仪实测以及后续发展的GPSRTK等传统测量手段,精度上不仅受限于观测设备的系统误差,还取决于作业外场的环境因素、丈量、人眼读数等偶然误差,且每一个地貌特征点全靠作业员一个个实测完成,作业效率低,大大限制了长距离、大范围地质构造区域测量工作的开展。而高精度数字高程模型(DEM)与高分辨率正射影像图(DOM)能够详细刻画地貌特征,日趋成为活动构造定量参数提取与地貌解译的重要手段,因此,高效获取大范围高精度DEM,已成为今后地质构造研究领域的又一重要工作内容。无人机机载激光雷达扫描(LiDAR)技术的出现为快速获取大面积、高精度地形地貌数据提供了一种前所未有的解决方案,机载LiDAR不仅解决了高效数据采集的问题,还在地表点位垂直方向上有着较高的测量精度。虽然机载LiDAR以其多次回波信号的特点可有效剔除地表植被,然而高昂的作业成本严重限制了该技术的推广与应用(刘静等,2013;Cunningham,2006;Zielke,2010;Oskin,2012;Chen,2014;Ren,2016)。
近年来,倾斜摄影测量作为一项服务于测绘领域的高新技术从航空摄影测量中脱颖而出,它搭载多台传感器,具有传统航测垂直摄影相机,能够同时从前、后、左、右4个方向采集地物侧面纹理信息,全方位、多角度提取与匹配地物特征,从具有一定重叠度的影像中恢复摄影瞬间相机的相对位置与姿态(姚方芳,2014;段宗恩,张海生,2019;张祖勋等,2003),通过三维重建,可获得具有高精度地理坐标与高程的三维实景模型、数字地表模型(DSM)、正射影像图(DOM)。与机载LiDAR技术相比,在点云密度方面二者能够达到同级别水平,但倾斜摄影测量具有航测范围大、操作简便、成本低等优势,且具有更高的平面点位精度,三维实景模型效果更直观。特别在植被低覆盖地区,倾斜摄影测量能够替代机载LiDAR技术,成为获取高精度地形数据的首选测量方案。
自2008年以来,新疆皮山县及其邻区发生多次强震,造成了巨大的人员伤亡和财产损失。该地区发育多条大型走滑断层,探讨其震后构造运动特征,有助于辨别该地区地震孕育与发生机制,为判断该地区未来地震提供有力支撑。本文利用无人机倾斜摄影测量技术,借助构建三维实景模型、高精度DSM,以新疆西昆仑山前、皮山县西南邻区地貌点为例,进行了地貌信息获取与解译,精确提取了各级断层陡坎的垂直位移值,分析了倾斜摄影测量技术在构造微地貌研究中的应用前景。
1 倾斜摄影测量原理
传统航空摄影测量采用的是垂直俯视摄影数据采集,没有地物侧面立体纹理信息,不能依据人眼浏览现实世界的习惯、不能以任意角度实时观察模型场景。倾斜摄影测量则挂载5个传感器,从俯视、前视、后视、左视、右视5个方向进行数据采集,如图1a所示。采集内容包括飞行器高度、航速、航向重叠度、旁向重叠度、POS数据等参数,倾斜相机主光轴从一定的倾斜角度进行拍摄(可获取大量地物侧面纹理信息),俯视与倾斜影像间均有重叠部分,借助最小二乘配置法进行平差,实现室内空中三角测量,获得加密点平面与高程位置,进而完成密集点匹配与三维模型重建,其三维实景模型具有与现实场景一致的真实感。为了确保所采集影像数据质量的可靠性,需对相机传感器进行标定与检校,而相机标定是从世界坐标系转换至图像坐标系的过程(求投影矩阵的过程),该过程需确定相机内参数、外参数及畸变参数。本文所用相机组为DG3Pro,以其垂直摄影传感器为例,其相机校准后的影像残差图如图1b所示,利用其畸变参数可对后期所采集的影像数据进行畸变校正,确保影像质量。
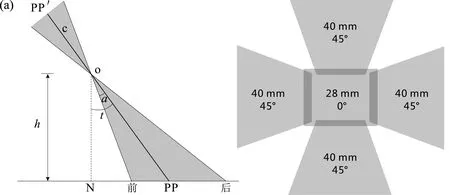
图1 倾斜摄影测量原理(a)与相机校准影像残差图(b)Fig.1 Principle of oblique photogrammetry(a) and residual of camera calibration(b)
2 研究区构造环境
皮山县及其邻区位于新疆塔里木盆地西南缘、青藏高原西北段、西昆仑山前,是新疆地区地震多发地,也是国内外诸多地震、地质学家研究青藏高原隆升(地壳厚度约70 km)的重点地区(Negredo,2007;Tseng,2009)。该地区地震频发(图2),沿塔里木盆地西南缘展布多条走滑活动断裂,如西昆仑山前断裂带、康西瓦断裂带、喀喇昆仑断裂。
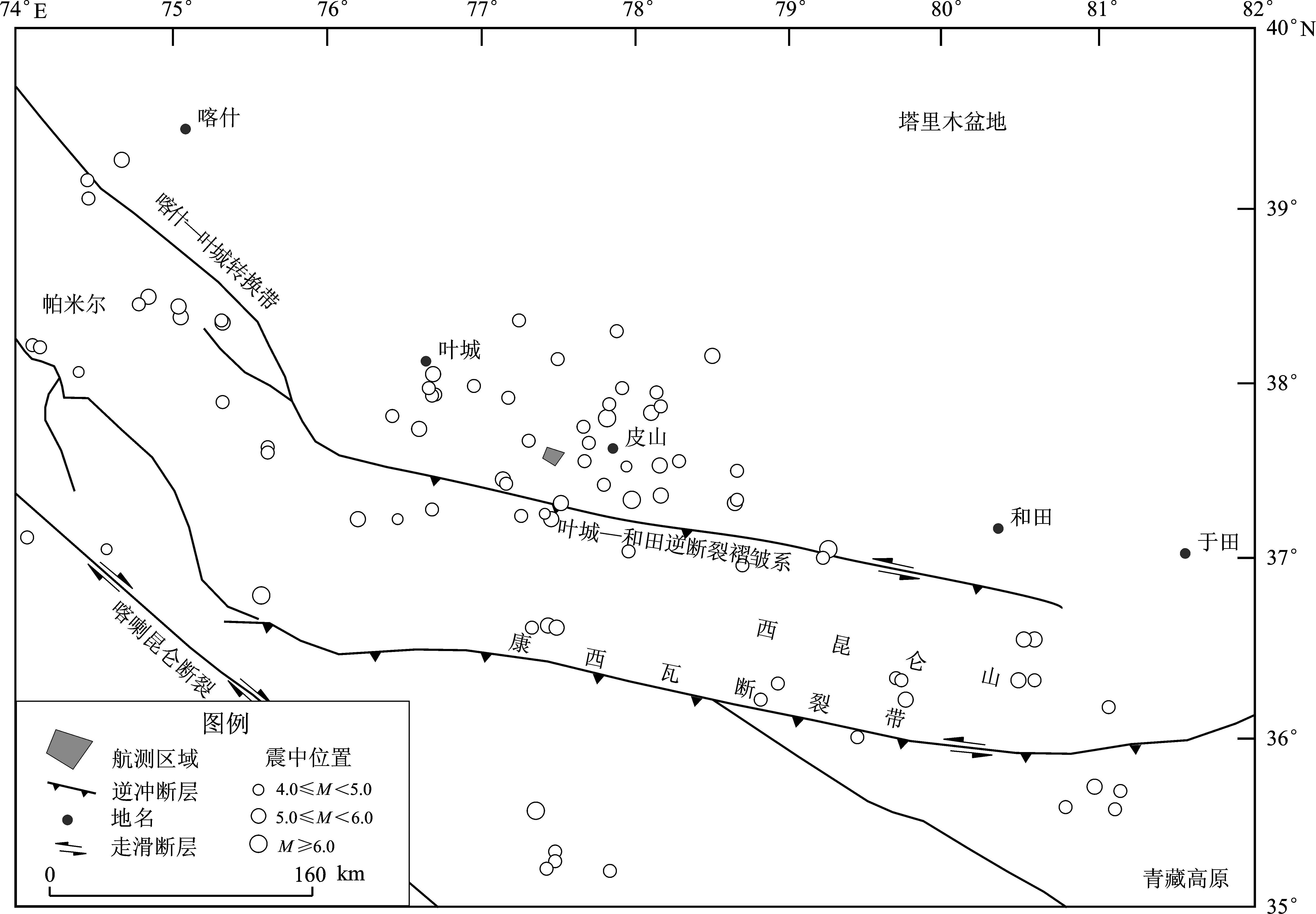
图2 本文航测区域与地质构造分布Fig.2 Aerial survey area and geological structures
西昆仑山前断裂位于塔里木盆地与西昆仑的过渡区,属于逆冲转换带,但在不同区段又呈现出不同的地表构造特征。叶城以北的喀什—叶城转换带走向为SSE,山前新生代以来的构造变形以掀斜为主(李向东,王克卓,2006;张玮等,2010;Qu,2005);叶城以东的叶城—和田逆断裂-褶皱系走向近EW向,其受南侧向北挤压推覆形成薄皮褶皱带,覆盖于塔里木盆地之上,形成一系列以背斜为主的山前构造带,而在地表则表现为高出戈壁平原100~300 m 的丘陵地貌(潘家伟等,2007);近EW走向的康西瓦断裂带长约700 km,属于阿尔金断裂的延伸部分(Tapponnier,Molnar,1977;Peltzer,1989;付碧宏等,2006),是一条大型的左旋逆冲断裂带;南部的喀喇昆仑断裂属右旋走滑断裂,长约510 km,走向S45°E,该断裂在长期历史构造活动过程中控制着青藏高原西北端的运动方向,使得帕米尔向北移动了近300 km(Hamburger,1992)。
3 数据采集与结果分析
3.1 数据采集
航测区域位于皮山县西南方向约15 km处,面积为20.08 km。本次航测采用六旋翼无人机M600Pro(图3a),搭配五镜头相机DG3Pro(图3b),正摄镜头焦距28 mm,倾斜镜头焦距40 mm,45°倾角(表1)。为确保航测安全与质量,该无人机配备3套GPS定位模块。由于测区范围较大,航测工作采用分块采集,将整体区域划分为4个区块(图3d),相邻两个区块均有重叠部分,且要保证重叠区域覆盖公共地面控制点。虽然无人机配备差分GPS装置,为每张影像提供拍摄瞬间POS数据,但其只是相对空间位置,若成果需满足高精度点位坐标,则仍需在地表布设像控点,提供绝对点位约束。因此,本文在测区布设152个地表控制点(图4a,采用CGCS2000坐标系,高斯投影3°带,中央子午线78°),点位间距平均约200 m,每个像控点采用差分GPSRTK进行实测,其平面精度达±(8+1×10×)mm,高程精度±(15+1×10×)mm,控制点均匀布设于整个测区,有效控制了成果在水平与高程上的变形。

(a)M600pro无人机

(b)五镜头相机

(c)RTK接收机

(d)航线规划图3 倾斜摄影数据采集设备(a、b、c)与航线规划图(d)Fig.3 Data-acquisition equipments for tilt photography(a,b,c)and route planning map(d)
考虑到测区属于戈壁、沙漠等弱纹理地表,后期在特征点匹配中难度较大,为了确保空三环节的通过性,在航测阶段航线的设置上,参数取航高约240 m,航向重叠度80%,旁向重叠度75%,影像分辨率为3 cm。整体外场数据采集共飞16架次,采集影像43 650张,POS数据43 650条。内业数据处理中,处理器采用高性能GPU集群服务器(10台节点机,详细配置性能见表1),处理过程中综合使用了ContextCapture、Smart3D、Pix4Dmapper等影像处理平台,运算时间18 h,最终获取了9 cm三维实景模型、3.39 cm DOM与DSM等具有空间地理坐标的高分辨率数字模型数据。
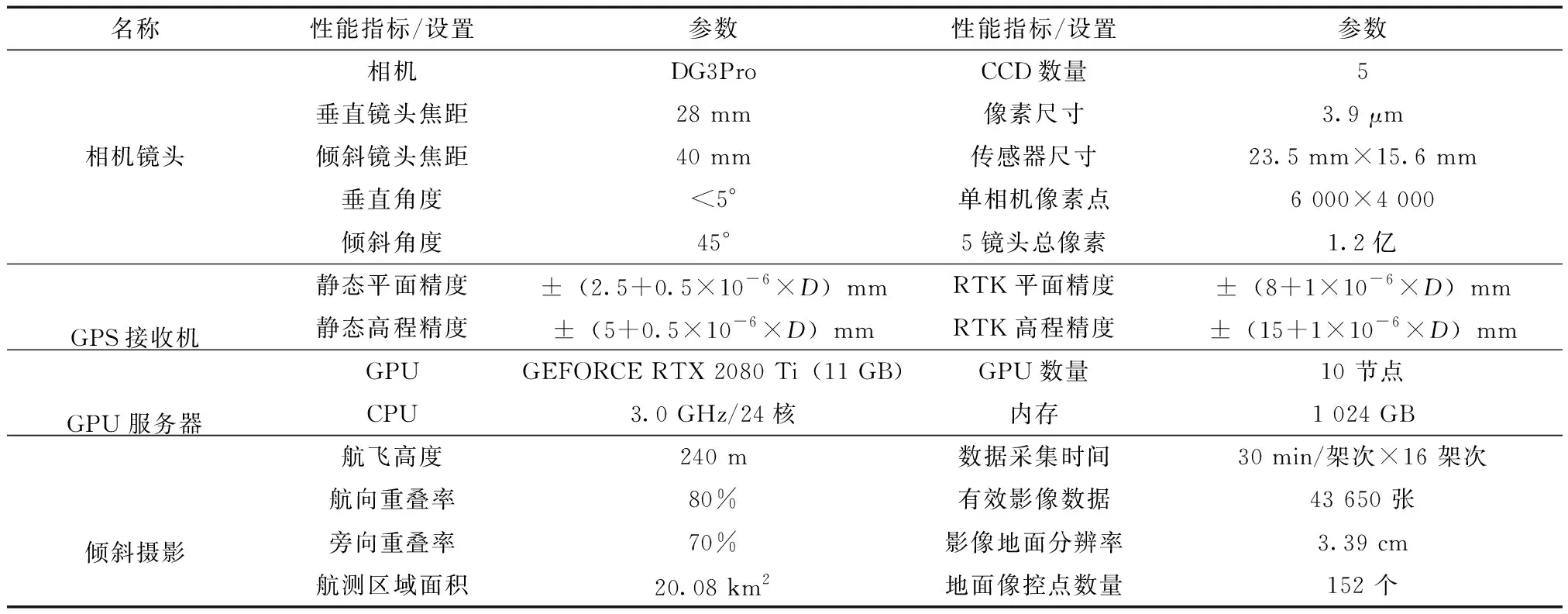
表1 倾斜摄影数据采集与处理参数Tab.1 Parameters of data acquisition and processing of tilt photography
3.2 精度评定
经倾斜摄影测量数据采集与内业空中三角测量与模型构建,获取了高分辨率DOM、DSM及三维实景模型(图4、5)。图4b显示了测区数据的特征点匹配结果,图中表明了该测区戈壁、沙漠弱纹理的地貌特征,灰白色区域较大,可匹配的特征点较少,但由于前期外业数据采集采用了航高、重叠率等一系列航线规划措施,所以内业空三解算一次通过,取得了较好的成果。图5则是基于倾斜摄影测量构建的三维实景模型,分别是模型白模、不规则三角网TIN结构模型以及赋予精细纹理的三维实景模型,图5c清晰、直观地展现了断层陡坎,即两级地貌面的过渡地形。

(a)航测区域地表像控点分布

(b)影像特征点匹配图

(c)正射影像图(DOM)

(d)数字地表模型(DSM)图4 倾斜摄影数据处理与结果Fig.4 Data processing and results of tilt photography
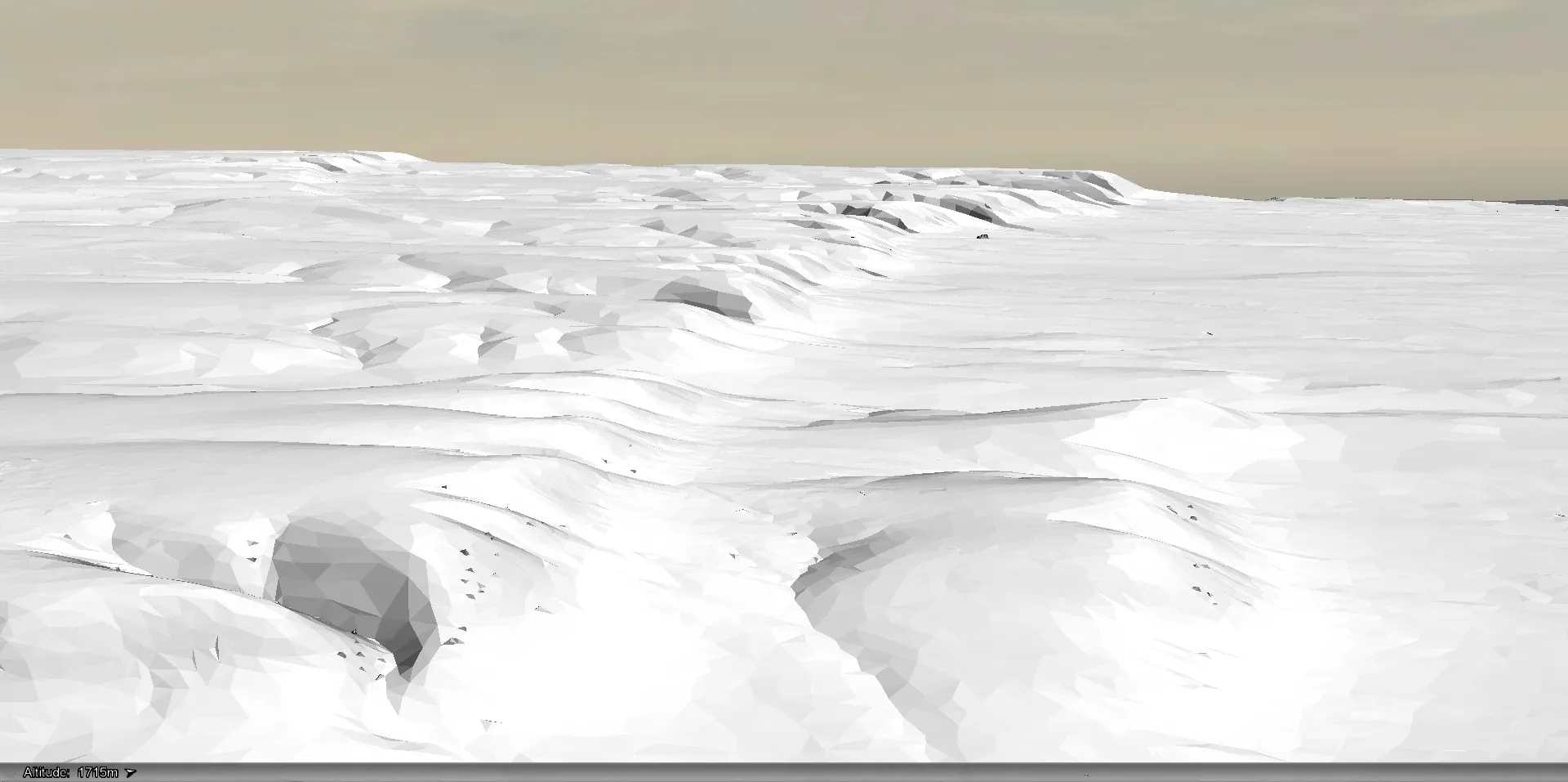
(a)白模
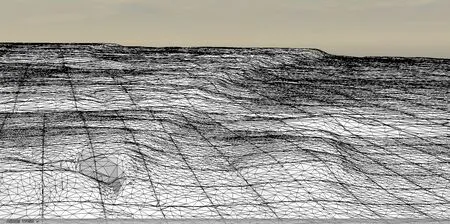
(b)不规则三角网TIN结构

(c)三维模型纹理构建图5 倾斜摄影测量三维实景建模Fig.5 3D real scene modeling of oblique Photogrammetry
为了验证倾斜摄影测量所获取的数字成果的精度,本文对所布设的152个地面控制点进行了点位精度评定,包括点位平面中误差与高程中误差,计算公式见式(1)(2),详细统计见表2。根据外场实测点位三维坐标与模型相应点位坐标做一阶差分,取得每个控制点在平面横坐标、纵坐标以及高程3个方向上的差值,从而计算得到整个测区152个控制点的综合点位平面中误差为1.7 cm,高程中误差为5.3 cm。同时,在测区均匀布测了8个检查点,检查点平面中误差为2.3 cm,高程中误差为11.8 cm,该精度完全满足测绘1∶500大比例尺航空摄影测量的精度要求。同样,DOM、DEM及三维实景模型等数字成果可为该地区地质构造的定量参数提取提供强有力的支撑。
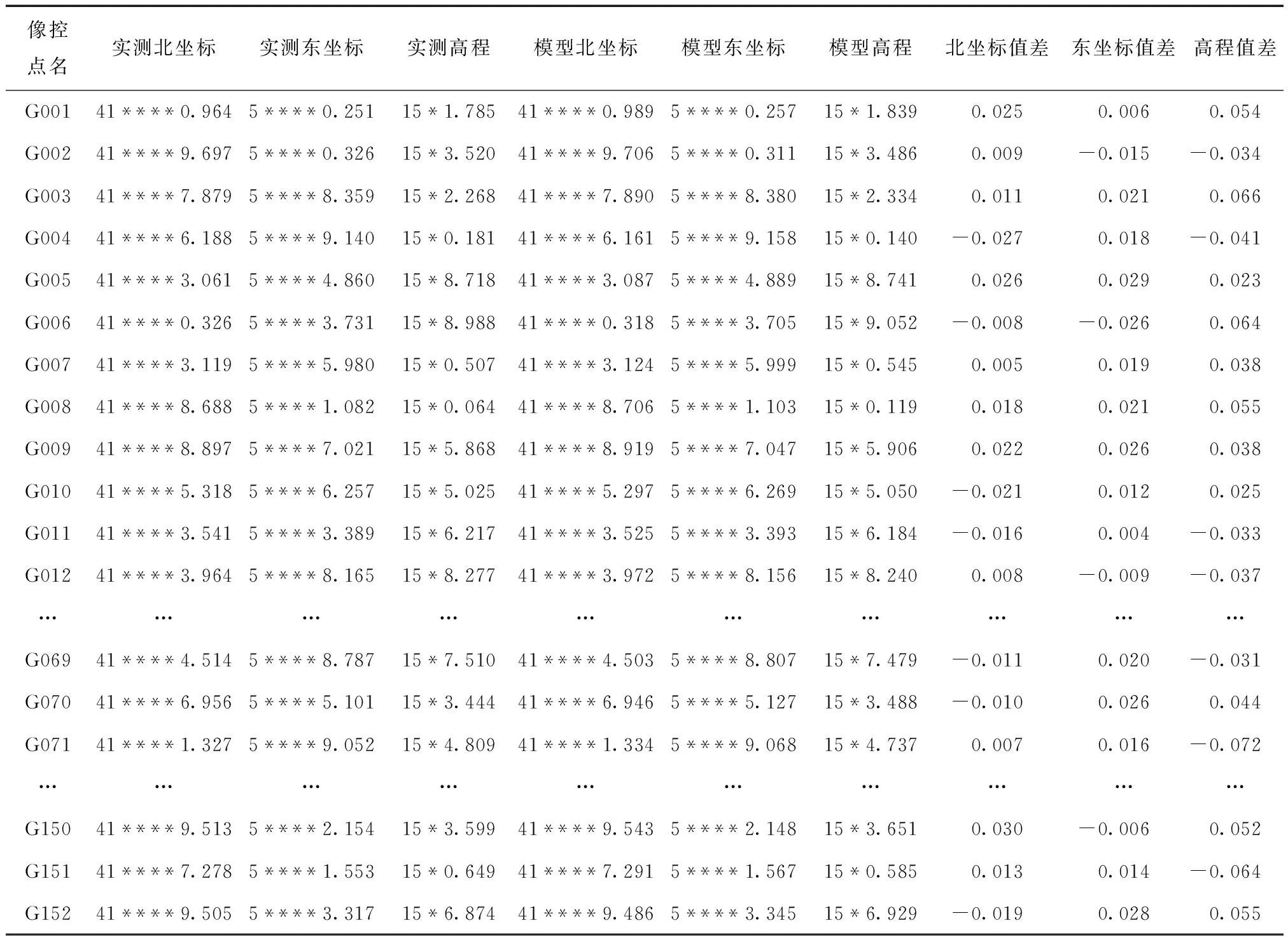
表2 地面控制点平面与高程中误差精度检验(单位:m)Tab.2 Accuracy check of the mean-square error of the plane and the elevation of ground control points(unit:m)

(1)

(2)
式中:代表平面点位中误差;代表平面点位中误差;Δ为各点模型坐标与实测坐标差值;Δ为各点位模型高程与实测高程差值。
4 地貌解译与定量参数的提取
本文研究的测区地表完全裸露,无植被覆盖,适用于数字影像数据进行地貌解译,因此利用无人机倾斜摄影测量及其DSM等数字模型成果,对于地貌解译与活动构造定量参数的提取是一种较为理想的手段。
4.1 地貌初步解译
如图6a所示,通过倾斜摄影三维实景模型,能够清楚判别地形地貌。测区西侧分布着一系列陡坎地貌,这些陡坎存在于较高的不同地貌面上。从图6b消隐纹理的立体模型中,同样可以判定断层陡坎的分界与走向。因此,借助三维立体模型,对研究区西侧的高地貌面进行了初步解译,划定了七级断层陡坎。

(a)断层陡坎初步解译位置图
(b)三维DEM下的断层陡坎侧视图图6 基于倾斜摄影三维模型的地貌特征初步解译图Fig.6 Preliminary interpretation of geomorphic features based on 3D model of oblique photography
4.2 DSM衍生数据处理
借助高分辨率DSM模型,能够衍生出等高线、坡度图等数字专题图,运用这些衍生数据,为地形地貌解译工作提供更为有力的支撑。图7为测区西侧高分辨率DSM、等高距为5 m的等高线图及坡度图。从图中可以发现,通过等高线图能够清晰地辨别测区南部高差较大的断层陡坎,且测区西侧地形特征十分显著,坡度图则展示了0°~90°不同坡度角的陡坎或斜坡,特别是11.93°~47.02°的坡度线痕迹清晰可辨,为地貌解译工作提供了帮助。
4.3 地貌精细解译
对研究区地貌的精细解译,需借助高分辨率DSM及其衍生成果数据来完成。如图7所示,DSM可查询任意位置的高程数据(南高北低),亦可依据高程值直观显示地形地貌。等高线密集地表示地形起伏较大的陡坎特征线,等高线稀疏地则为平坦区。坡度图是判别构造陡坎的另一种具有价值的专题衍生数据,图7c中绿色区域表示较小坡度的地形地貌(0°~4.21°),而由构造运动引起高差较大的断层陡坎在该图中则构成为深红色的地貌标志线,但往往亦具备有浅红与黄色等缓坡过渡带特征。经对比DSM与其衍生数据,可以判断该研究区由于受到自南向北的构造推覆作用,造就了不同断层陡坎的垂直断错与变形。

(a)DSM (b)5 m等高线 (c)坡度图图7 重点区块DSM及其衍生图Fig.7 DSM and its derivative map of key blocks
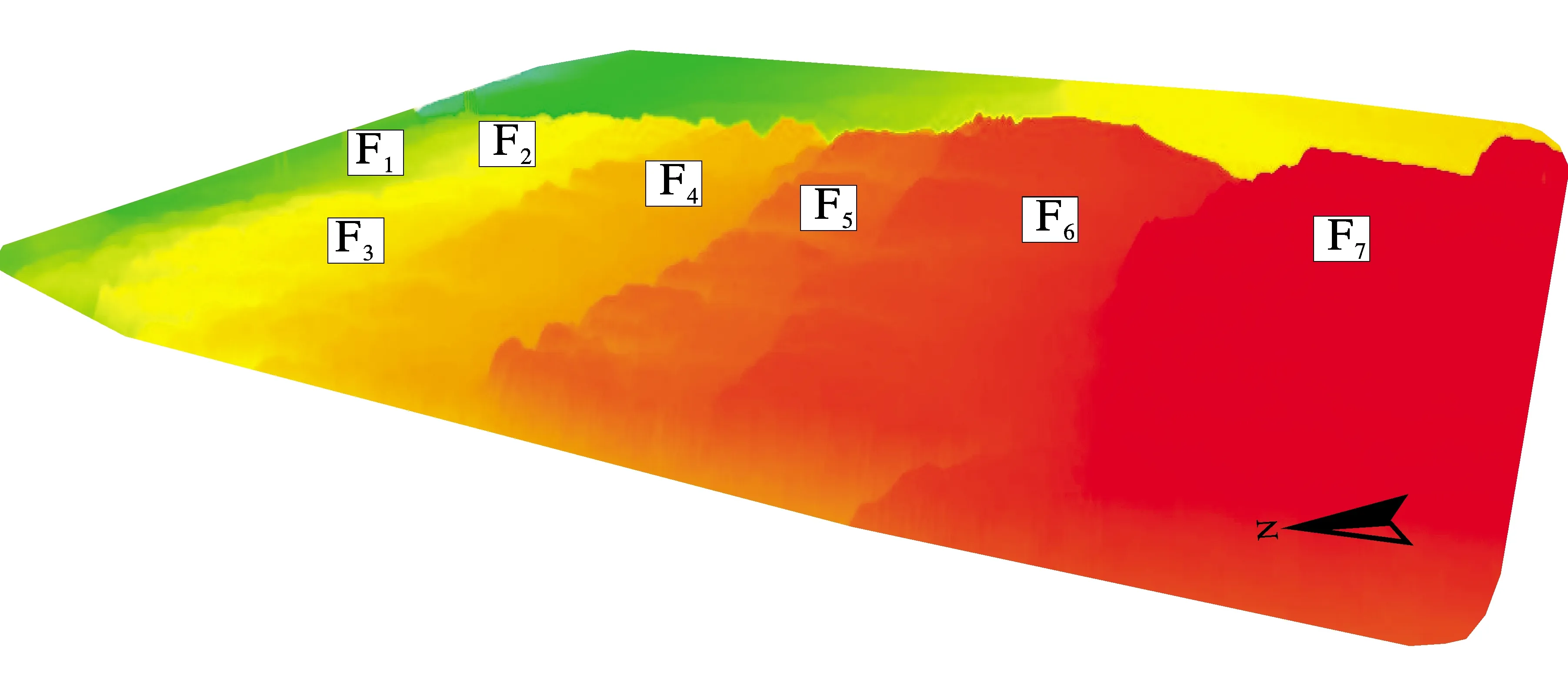
为了精确解译地貌,除了对比分析DSM、等高线图、坡度图等数据,本文还依据DSM在NNE方向提取了3条地形剖面线(图7a中虚线)及与其对应的坡度剖面线,将地形剖面线与坡度数据加以叠加(图8),剔除了对地貌解译的一些干扰因素,并对该叠加图进行了分析,获取了地貌面的精细解译结果。从图8可见,该测区共划分了七级断层陡坎,高差相对最大的是F与F,与最高的坡度峰值相对应,且在F局部出现了由于地表受到侵蚀作用的起伏现象,同样对应显著的坡度峰值。其它断层陡坎内部地形整体平缓,断层陡坎分界线与坡度峰值对应较好。通过对研究区断层陡坎地形剖面线、坡度图与相关定量信息的综合分析,利用高分辨率DOM给出了精细地貌解译结果(图9b)。
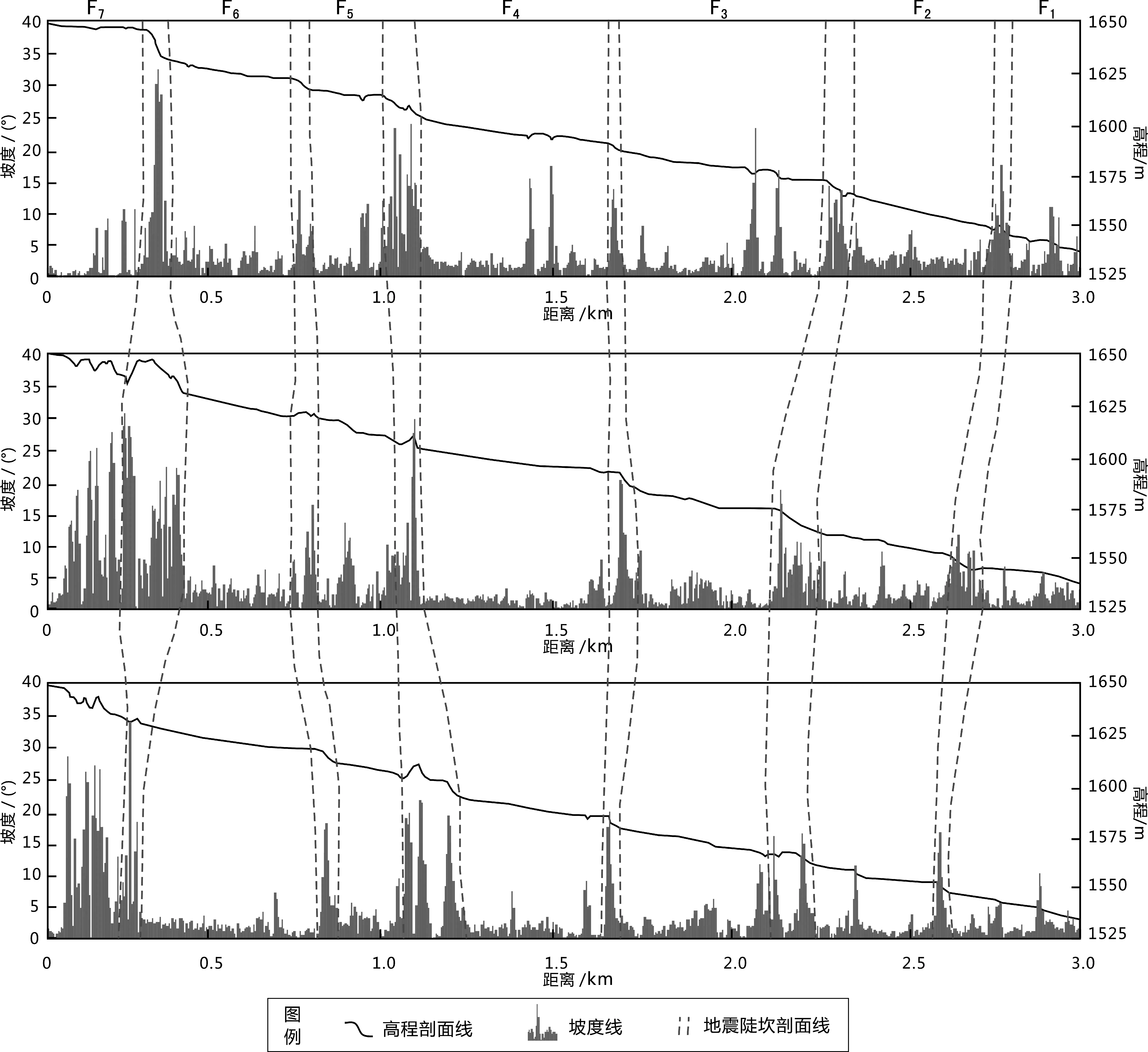
图8 地形剖面线与坡度叠加分析图Fig.8 Map of analysis of overlaid terrain profile and slope

图9 研究区正射影像图(a)与断层陡坎解译图(b)Fig.9 Map of the orthophoto(a)and the terrace interpretation(b)of the study block
4.4 垂直位移量的参数确定
为了精确确定各断层陡坎垂直位移量,将DSM与等高线进行了套合,如图10a所示,并结合精细解译结果,选取了6条陡坎剖面线,对各断层陡坎间进行了定量分析,断层陡坎垂直位移量的计算方案图解如图10b所示。分别对陡坎两侧一定距离内地形垂直方向上的剖面数据做最小二乘拟合处理(图10c中给出了各趋势线的拟合公式),拟合线分别记为、,通过图中公式即可获得断层陡坎的最终垂直位移量(俞晶星,2013)。运用该方法,分别对F~F断层陡坎计算了垂直位移量:F为(3.71±0.62)m、F为(3.54±0.04)m、F为(6.06±0.22)m、F为(7.43±0.56)m、F为(5.52±0.18)m、F为(13.05±0.33)m。
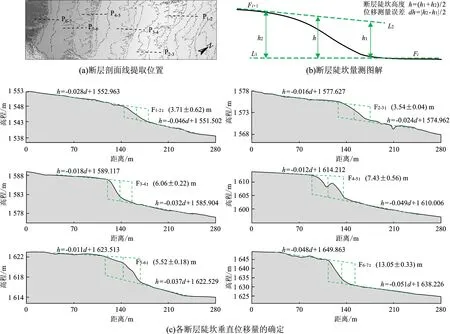
图10 断层陡坎垂直位移量确定示意图解Fig.10 Schematic diagram of determination of vertical fault of terrace
5 结论
本文探讨了倾斜摄影测量技术及其应用原理,运用无人机对新疆皮山县附近20.08 km的研究区进行了倾斜摄影测量与数据处理。通过控制点实测坐标与模型对应坐标计算,分析了本次航测建模的点位平面中误差与高程中误差。同时,基于高分辨率模型数据,对研究区断层陡坎进行精确解译,主要获得如下认识:
(1)传统基于低分辨率的卫星影像、SRTM与ASTERd等DEM(90 m/30 m分辨率)数字模型,仅能够在高空俯视角下识别较大地质体走向及地貌概况,无法对细微地形给出精细解译或对活动构造提取定量参数信息。本文使用无人机倾斜摄影测量,获得了9 cm三维实景模型、3.39 cm DOM、DSM等具有空间地理坐标的高分辨率数字模型数据,精度可达cm级,完全能够满足地质活动构造的微地貌解译与定量参数的计算。检查点平面中误差为1.7 cm,高程中误差为5.3 cm,该精度完全满足大比例尺测图精度的要求。
(2)基于DSM衍生了等高线图与坡度图,借助高分辨率模型数据,对研究区断层陡坎实现了微地貌解译,提取了F~F断层陡坎的垂直位置量分别为(3.71±0.62)、(3.54±0.04)、(6.06±0.22)、(7.43±0.56)、(5.52±0.18)、(13.05±0.33)m,达到了较好的量测、解译效果。表明借助三维实景模型,在室内可重现现实世界对高空峭壁、低洼深沟等人员无法到达的地方以任意角度、视距进行查看与量测,为地质相关工作提供了强有力的技术支持。
(3)相比全站仪、RTK、卫星影像、机载LiDAR等传统测量手段而言,低空倾斜摄影测量是一种集成果三维直观性强、数据获取效率高、采集范围广、成果精度高、运行成本低等优势于一身的测绘技术手段,在地质活动构造定量研究中具有广阔的应用前景。
猜你喜欢
汽车电器(2022年6期)2022-07-02
科技创新与品牌(2022年4期)2022-05-08
考试与评价·高二版(2020年4期)2020-09-10
福建基础教育研究(2020年3期)2020-05-28
西部资源(2018年1期)2018-11-01
建筑建材装饰(2017年6期)2017-07-04
中外会展(2016年10期)2016-11-29
汽车之友(2016年15期)2016-08-23
知识窗(2016年2期)2016-05-14
建筑工程技术与设计(2015年12期)2015-10-21