
仿鳐鱼水陆两栖机器人水下航行运动分析与研究
2022-06-25 14:11展凯利马梦遥李海峰张诗雯韩川
科教创新与实践 2022年9期
展凯利 马梦遥 李海峰 张诗雯 韩川
摘要:通过对鳐鱼胸鳍波动的运动模式分析,本文建立仿生鳐鱼运动学模型。通过对鳐鱼的表面压力、运动速度以及各方向的受力情况进行比较,得出鳐鱼产生动力的来源。然后对仿鳐鱼机器人运动时推力与升力调节的分析,研究仿生鳐鱼水下机器人可实现在水中的稳定航行的理论。
关键词:仿鳐鱼机器人;水下航行;运动分析与研究
一、鳐鱼及其仿鳐鱼机器人的介绍
鳐鱼是一种两栖动物[1],在游动时靠胸鳍作波状摆动而前进。基于鳐鱼的运动特性,本文设计出仿鳐鱼机器人。它通过一种以波浪状的飘带鳍的摆动来游动。根据仿生学原理,机器人的两侧装备有一对波浪形的飘带,飘带的运作方式类似鳐鱼的胸鳍,通过多种运动变化来给机器人提供前进转向的动力。这款机器人可以完美适应所有地形,水中、平地、沙地、雪地等都可以自由行动。
二、仿生鳐鱼机器人结构分析
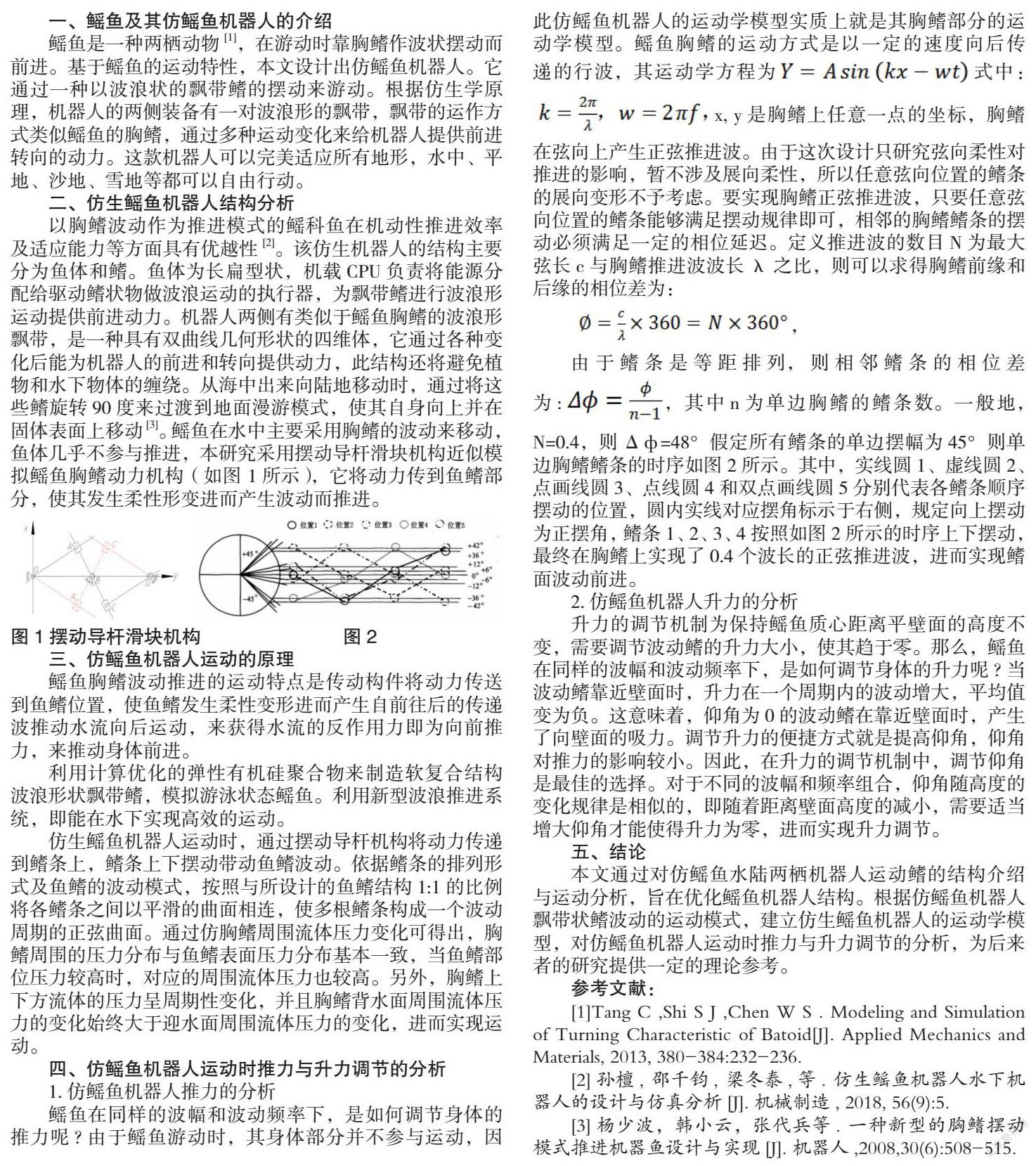
以胸鳍波动作为推进模式的鳐科鱼在机动性推进效率及适应能力等方面具有优越性[2]。该仿生机器人的结构主要分为鱼体和鳍。鱼体为长扁型状,机载CPU负责将能源分配给驱动鳍状物做波浪运动的执行器,为飘带鳍进行波浪形运动提供前进动力。机器人两侧有类似于鳐鱼胸鳍的波浪形飘带,是一种具有双曲线幾何形状的四维体,它通过各种变化后能为机器人的前进和转向提供动力,此结构还将避免植物和水下物体的缠绕。从海中出来向陆地移动时,通过将这些鳍旋转90度来过渡到地面漫游模式,使其自身向上并在固体表面上移动[3]。鳐鱼在水中主要采用胸鳍的波动来移动,鱼体几乎不参与推进,本研究采用摆动导杆滑块机构近似模拟鳐鱼胸鳍动力机构(如图 1所示),它将动力传到鱼鳍部分,使其发生柔性形变进而产生波动而推进。
三、仿鳐鱼机器人运动的原理
鳐鱼胸鳍波动推进的运动特点是传动构件将动力传送到鱼鳍位置,使鱼鳍发生柔性变形进而产生自前往后的传递波推动水流向后运动,来获得水流的反作用力即为向前推力,来推动身体前进。
利用计算优化的弹性有机硅聚合物来制造软复合结构波浪形状飘带鳍,模拟游泳状态鳐鱼。利用新型波浪推进系统,即能在水下实现高效的运动。
仿生鳐鱼机器人运动时,通过摆动导杆机构将动力传递到鳍条上,鳍条上下摆动带动鱼鳍波动。依据鳍条的排列形式及鱼鳍的波动模式,按照与所设计的鱼鳍结构1:1的比例将各鳍条之间以平滑的曲面相连,使多根鳍条构成一个波动周期的正弦曲面。通过仿胸鳍周围流体压力变化可得出,胸鳍周围的压力分布与鱼鳍表面压力分布基本一致,当鱼鳍部位压力较高时,对应的周围流体压力也较高。另外,胸鳍上下方流体的压力呈周期性变化,并且胸鳍背水面周围流体压力的变化始终大于迎水面周围流体压力的变化,进而实现运动。
四、仿鳐鱼机器人运动时推力与升力调节的分析
1.仿鳐鱼机器人推力的分析
鳐鱼在同样的波幅和波动频率下,是如何调节身体的推力呢?由于鳐鱼游动时,其身体部分并不参与运动,因此仿鳐鱼机器人的运动学模型实质上就是其胸鳍部分的运动学模型。鳐鱼胸鳍的运动方式是以一定的速度向后传递的行波,其运动学方程为式中:x, y是胸鳍上任意一点的坐标,胸鳍在弦向上产生正弦推进波。由于这次设计只研究弦向柔性对推进的影响,暂不涉及展向柔性,所以任意弦向位置的鳍条的展向变形不予考虑。要实现胸鳍正弦推进波,只要任意弦向位置的鳍条能够满足摆动规律即可,相邻的胸鳍鳍条的摆动必须满足一定的相位延迟。定义推进波的数目N为最大弦长c与胸鳍推进波波长λ之比,则可以求得胸鳍前缘和后缘的相位差为:
由于鳍条是等距排列,则相邻鳍条的相位差为:,其中n为单边胸鳍的鳍条数。一般地,N=0.4,则Δф=48°假定所有鳍条的单边摆幅为45°则单边胸鳍鳍条的时序如图2所示。其中,实线圆1、虚线圆2、点画线圆3、点线圆4和双点画线圆5分别代表各鳍条顺序摆动的位置,圆内实线对应摆角标示于右侧,规定向上摆动为正摆角,鳍条1、2、3、4按照如图2所示的时序上下摆动,最终在胸鳍上实现了0.4个波长的正弦推进波,进而实现鳍面波动前进。
2.仿鳐鱼机器人升力的分析
升力的调节机制为保持鳐鱼质心距离平壁面的高度不变,需要调节波动鳍的升力大小,使其趋于零。那么,鳐鱼在同样的波幅和波动频率下,是如何调节身体的升力呢?当波动鳍靠近壁面时,升力在一个周期内的波动增大,平均值变为负。这意味着,仰角为0的波动鳍在靠近壁面时,产生了向壁面的吸力。调节升力的便捷方式就是提高仰角,仰角对推力的影响较小。因此,在升力的调节机制中,调节仰角是最佳的选择。对于不同的波幅和频率组合,仰角随高度的变化规律是相似的,即随着距离壁面高度的减小,需要适当增大仰角才能使得升力为零,进而实现升力调节。
五、结论
本文通过对仿鳐鱼水陆两栖机器人运动鳍的结构介绍与运动分析,旨在优化鳐鱼机器人结构。根据仿鳐鱼机器人飘带状鳍波动的运动模式,建立仿生鳐鱼机器人的运动学模型,对仿鳐鱼机器人运动时推力与升力调节的分析,为后来者的研究提供一定的理论参考。
参考文献:
[1]Tang C ,Shi S J ,Chen W S . Modeling and Simulation of Turning Characteristic of Batoid[J]. Applied Mechanics and Materials, 2013, 380-384:232-236.
[2]孙檀, 邵千钧, 梁冬泰,等. 仿生鳐鱼机器人水下机器人的设计与仿真分析[J]. 机械制造, 2018, 56(9):5.
[3]杨少波,韩小云,张代兵等. 一种新型的胸鳍摆动模式推进机器鱼设计与实现[J]. 机器人,2008,30(6):508-515.
