
基线3 ETCS列控系统ATP制动减速度转换模型研究
2022-06-27 08:37龙时丹
铁路通信信号工程技术 2022年6期
龙时丹
(国家铁路局装备技术中心,北京 100070)
1 概述
为解决欧洲铁路各国列控系统互联互通问题,降低运营成本,欧洲主要铁路设备供应商参与制定了欧洲铁路运输管理系统/欧洲列车控制系统(ERTMS/ETCS)需求规范[1-5]。目前最为完善的基线为基线3发布版本2,其制定了通用的列车制动曲线模型。
列车制动曲线是列车自动防护系统(Automatic Train Protection,ATP)的核心控制单元,直接影响列车运行的安全性和高效性。紧急制动减速曲线(Emergency Brake Deceleration,EBD)和常用制动减速曲线(Service Brake Deceleration,SBD)是列车制动曲线的基本曲线,二者由列车固有减速性能即制动减速度确定。其他制动曲线,如紧急制动干预曲线(Emergency Brake Intervention,EBI)、常用制动干预曲线(Service Brake Intervention,SBI)、警告曲线(Warning,W)、允许速度曲线(Permitted speed,P)和指示曲线(Indication,I),均由EBD和SBD结合相应的延时时间推导而来[6-8]。
ETCS基线3以两种方式规定了列车制动减速度的获得方法。第一种为列车数据法,即根据以列车数据的形式从外部直接获取制动减速度参数,其使用方式简单但需要提前知道列车的制动性能。第二种为转换模型法,该方法将列车信息以参数的方式输入到转换模型中,进而得到制动减速度。ETCS基线3对转换模型进行详细的描述,其中制动减速度是其最为关键的参数,本文对制动减速度的计算方法和特点进行研究与分析。
2 制动减速度计算方法
车载系统计算列车制动曲线时,为简化计算量通常对列车制动减速度进行分段处理。根据ETCS车载规范可知,减速度最多可分为6段,其中列车第n段制动减速度ADn可使用公式(1)所示的三次多项式进行计算。

其中,λ0∈[30,250]为制动百分比,a3n~a0n统称amn,为多项式系数。具体取值如表1所示。

表1 制动减速度多项式系数取值Tab.1 Polynomial coefficient value table of brake deceleration
减速度分段点包含固定分段点和动态分段点,其中固定分段点为100、120、150和180 km/h,动态分段点为Vlim,且最小的分段点为Vlim,小于Vlim的固定分段点划分的速度段与第0段合并为一段,如表2所示。

表2 Vlim与速度分段的关系Tab.2 Relationship between Vlim and speed segmentation
Vlim的计算方法如公式(2)所示。

其中,x=16.85,y=0.428。
根据subset-026,常用制动和紧急制动的制动百分比λ0计算方法有所不同,如公式(3)所示。

根据公式(3)可知,紧急制动百分比λ0与列车制动百分比相同,常用制动百分比λ0最大为135。
3 制动百分比与制动减速度关系
根据公式(1)可知,第n个速度段的制动减速度ADn仅与制动百分比λ0的变化相关。令

推论1:满足表1的n个速度段的制动减速度f(λ0)是λ0的增函数。
证明:
fn(λ0)的一阶导数为

根据二次曲线性质可知,若满足公式(6)的条件,即二次项系数为正、判别式为负,则fn′(λ0)恒大于零。

将表1中每个速度段的多项式系数amn带入到不等式(6)中,如表3所示。

表3 制动减速度导数信息Tab.3 Derivative information of brake deceleration
由公式(5)和表3可知,n为0时,f0′(λ0)恒为正;n为2~5时,公式(6)的不等式关系成立,因此f2~5′(λ0)恒为正。
条件1:Vlim的最小值为72.25。
证明:
由于λ0的最小值为30,将λ0=30带入公式(2),容易得到Vlim的最小值为72.25。
条件2:当且仅当Vlim∈[0,100)时存在第1个速度段。
证明:根据表2易得此条件。
条件3:Vlim∈[0,116.16]时,f1′(λ0)为正值。
证明:

方程f1′(λ0)的根为

设正根为λ′0+,当λ0∈[0,λ′0+)时,f1′(λ0)为正值。
根据公式(2)和(7),容易得到Vlim∈[0,116.16]。
根据条件1,2和3可知,Vlim∈[72.25,100)时存在第1个速度段,且在此范围内f1′(λ0)恒为正。
综上所述,表1的n个速度段(0≤n≤5)的制动减速度f(λ0)是λ0的增函数。
4 分段减速度特性分析
根据推论1,随着制动百分比λ0的增大,各速度段减速度均增加。按照公式(1)的制动减速度计算和表2对减速度分段的划分,得到各速度段制动减速度与制动百分比的变化关系,如图1所示。
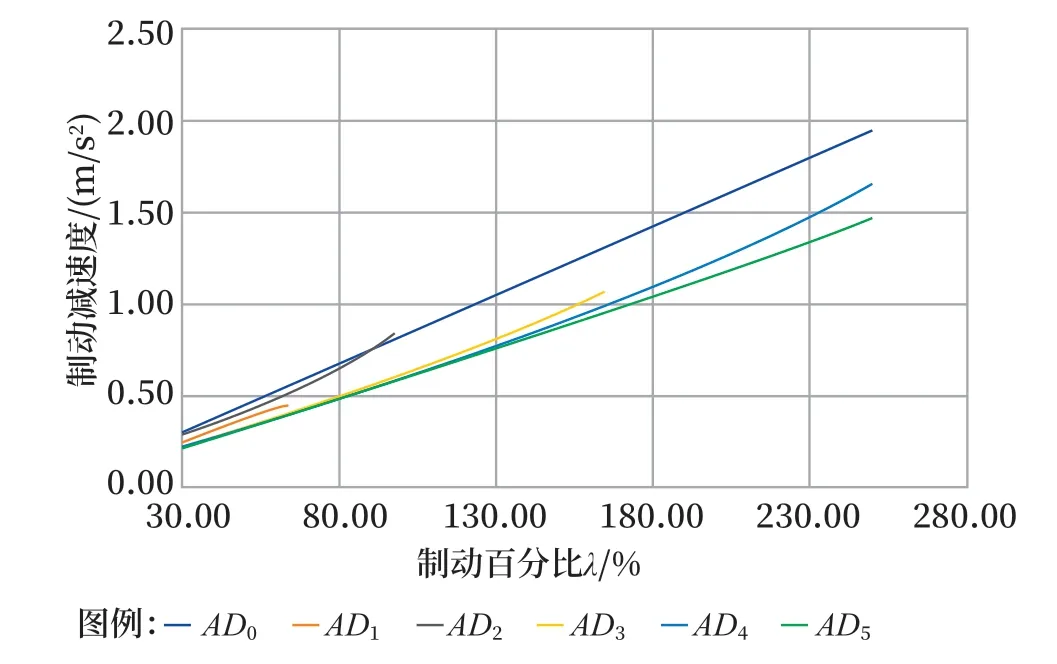
图1 各速度段制动减速度与制动百分比的变化关系Fig.1 Relationship between brake deceleration and brake percentage in each speed segment
根据图1可知:
1)当89≤λ≤98,AD2最大,λ属于其他值时AD0最大;
2)AD1恒小于AD2,即列车在速度分段Vlim≤Vtrain≤100的减速度恒小于100≤Vtrain≤120的减速度,其中Vtrain为列车速度;
3)AD0>AD1>AD3>AD4>AD5,即除第2段减速度AD2较为特殊外,制动减速度基本满足随着速度增加而减小的特性。
5 结论
根据本文对ETCS基线3的转换模型制动减速度变化规律分析结果可知,基于转换模型的制动减速度具有随着制动百分比的增大而增加,以及随着速度增加而减小的特性(除第2段外)。此结论对分析ETCS基线3转换模型制动特性和选取制动百分比具有指导作用。
猜你喜欢
导航定位学报(2022年4期)2022-08-16
舰船科学技术(2022年10期)2022-06-17
煤气与热力(2022年4期)2022-05-23
导航定位学报(2021年5期)2021-10-13
客联(2021年5期)2021-09-10
导航定位学报(2019年2期)2019-06-06
舰船电子对抗(2019年6期)2019-04-27
数学学习与研究(2016年23期)2017-03-15
股市动态分析(2015年29期)2015-09-10
海外星云 (2013年3期)2013-02-20
