
复合绝缘子自动清洗及检测系统设计
2022-06-27 08:29朱香将杜亚江李宗刚柯良斌魏永东
制造业自动化 2022年3期
朱香将,杜亚江,李宗刚*,柯良斌,魏永东
(1.兰州交通大学 机电工程学院,兰州 730070;2.兰州交通大学 机器人研究所,兰州 730070)
0 引言
复合绝缘子具有重量轻,耐污闪性能优异等优点,随着直流输电技术的迅速发展,因此被广泛应用于高压直流输电[1],尤其应用在轨道交通领域,其性能对列车的运行安全具有重要的影响。由于复合绝缘子长期暴露户外外表面会形成污秽层,导致绝缘子表面的绝缘能力降低,在正常工作电压运行下可能发生“污闪”现象,产生严重的交通事故[2]。
目前,在轨道交通及列车用复合绝缘子的清洗大都采用人工清洗的方法,需要投入大量的人力和时间,且不能保证清洗质量。另外,复合绝缘子进行喷水分级法检测其憎水性等级,多采用手持型检测仪对绝缘子进行喷水检测,受环境和手持方式的影响会使待测区域喷涂不均,使用目测的方法判断绝缘子的憎水性等级很不规范,人工手持的检测方式存在费时长、人工成本高、步骤繁杂、容易受环境影响等问题[3]。为解决上述问题,我们设计了一种复合绝缘子自动清洗及检测系统。该系统有清洗和检测模块,分别完成复合绝缘子的高效清洗和憎水性检测的任务,工业机器人负责绝缘子的搬运过程,工人在整个流程中只需要通过上位机进行监控和参数设置,大大地提高了绝缘子的清洗及检测效率。
1 系统总体设计
如图1为复合绝缘子自动清洗及憎水性检测系统控制框图,由图可知,该系统包括PLC控制模块、清洗设备模块、检测设备模块、图像处理模块、报警模块、数据采集模块、上位机和工业机器人。PLC系统模块输出指令控制清洗及检测模块,图像处理模块在后台对采集的图像数据进行图像分析,并且判定绝缘子憎水性等级。当清洗及检测设备运行模块出现异常情况,PLC系统启动报警模块。数据采集模块包括限位传感器,用于采集清洗和检测设备运行过程中位置数据,并将采集的信号传输给PLC模块。上位机利用LabVIEW平台编写操作界面与PLC模块相连,实现对设备运行的监控和参数设置,并且显示所测绝缘子憎水性等级[4]。

图1 控制系统框图
2 系统结构组成及动作流程
如图2为设备结构原理图,由图2(a)可知,绝缘子自动清洗设备,主要包括电动推杆、光电限位开关、左右毛刷辊等,通过电动推杆和限位开关可实现对不同型号复合绝缘子的自动限位夹持。如图2(b)检测设备,主要包括机架、盘形传送和同步带导轨。盘形传送由步进电机带动绝缘子依次进行图像采集,同步带导轨上安装有工业相机、雾化喷头和环形灯,采集图片时需要喷水,有水箱将流落下的废水进行统一收集。

图2 设备结构原理图
清洗设备模块:首先,机器人将复合绝缘子放置在下托盘,电动推杆自动下降到上托盘与绝缘子接触时,限位处弹簧被不断压缩;此时,光电开关将信号传输到PLC控制器,控制器将暂停命令传递到电动推杆,绝缘子正好被稳定的夹持住;之后,伺服电机带动左右毛刷辊旋转,两毛刷辊间由V带传动,旋转方向恰好相反;同时步进电机带动绝缘子转动,设备上部开始喷淋,达到较好的清洗效果。
检测设备模块:绝缘子底座形状为上部有拱形弧度面和下部内掏空的中心圆柱,拱形弧度是为了贴合绝缘子伞裙,内掏空的圆柱体用来放置绝缘子的芯棒,使绝缘子在随转台转动的时候不会晃动受到磕碰损坏;检测绝缘子时,检测机门关闭,减小外界环境对内部检测的影响;相机拍摄伞裙被喷水的部位,并将高清图像传回上位机后台进行图像处理。

图3 PLC输入输出分配图
3 控制系统软硬件设计
3.1 系统硬件设计
根据系统的控制要求,分析所需要的输入设备(传感器、限位开关等)和输出设备(电机驱动器、电磁阀、水泵等),其中6个输入点和12个输出点。综合考虑,选用西门子S7-200(CPU226)作为主控制器。
系统PLC控制器的输入输出分配图如图4所示,由图可知,PLC控制器输入模块用于采集和接收输入信号,如限位信号、光电开关信号和机器人反馈信号等;输出模块用来控制执行部件,控制驱动器、电磁阀和水泵等[5]。

图4 机械手实物控制图
清洗机中,电推杆下降至顶住绝缘子时,光电开关闭合,此时PLC的Q1.7与机器人X20信号交互,保证绝缘子被稳定的夹持住,机器人才离开清洗机,清洗机开始闭门运行。在执行检测任务时,门先关闭,光照打开、喷水,在标准检测环境下,采集图片进行憎水性等级判别。系统运行过程中,机器人与设备的信息交互通过I/O口实现,机器人将绝缘子放入检测机、清洗机时信号Y10、Y12分别对应PLC的I0.4、I0.5,回到初始位置信号Y11对应PLC的I0.0。
机械手的抓取部分,采用气动的方式,由空气压缩机、电磁阀、气缸和手爪构成。通过电磁阀控制气缸的张开或闭合进而实现两机械手抓取和放开的任务。其中两电磁阀与分别与机器人PLC输出端的Y08和Y09相连接,通过机器人程序的编写输出口进而控制机械手状态[6],如图8所示,机械手实物控制图。

图8 系统平台
3.2 系统软件设计
软件主要包括两个方面,一、PLC的程序控制,主要控制清洗机、检测机以及与机器人之间的信息交互,实现绝缘子从物料台到清洗机再到检测机的过程,最终完成对绝缘子的高效清洗及憎水性检测任务。二、上位机的程序设计,通过的程序编写,与PLC控制器连接,将系统运行的过程及检测结果在界面实时显示。
3.2.1 人机交互
为了方便工作人员的操作控制及系统参数的修改,自动清洗检测系统配置了人机交互模块。上位机采用LabVIEW平台编写操作程序,采用图形化编程语言,具有直观、形象和易于观察系统运行状况的特点,符合本系统的设计要求。此外LabVIEW可使用经过测试和支持的NI底层代码库创建诸多方面的设计,保证整个系统运行的平稳性和安全性,上位机与主控制器PLC通过RS-485串口通讯[9,10]。
由图5上位机主界面可知,一方面能够实时显示系统的工作状况,包括:运行步骤、错误警示和通信情况。系统运行到每个步骤,右侧蓝灯都会实时的显示,方便错误的诊断和排查,提高系统智能化程度。另一方面可体现运行数据,采集的绝缘子表面图片数据,通过后台图像处理程序能够实时获得每组复合绝缘子的憎水性等级并自动保存,同时通过数据查询也可获得历史数据,如图6所示。

图5 主界面
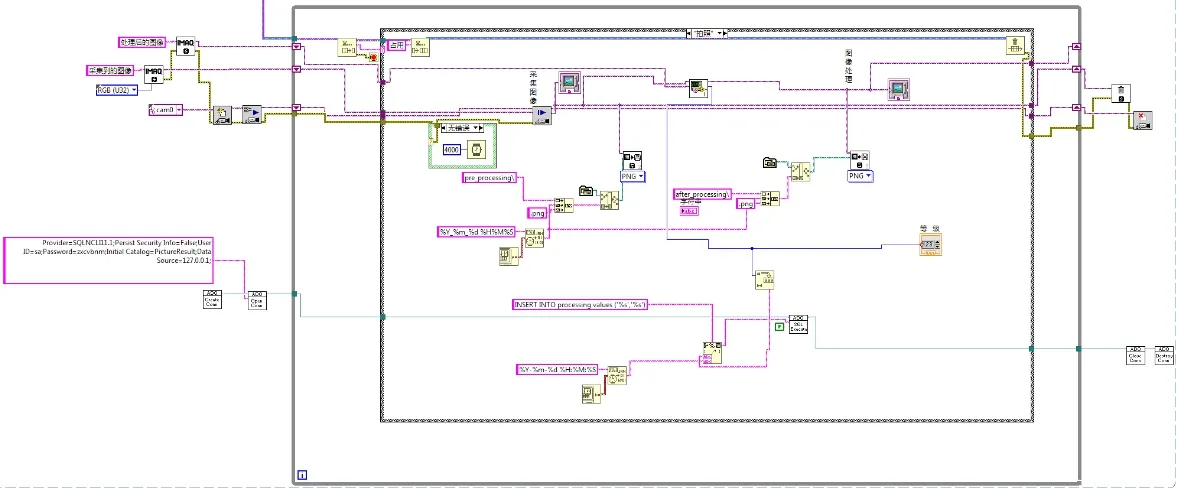
图6 图像采集和数据处理
3.2.2 PLC主程序设计
根据控制系统的需求,PLC控制流程如图7所示,我们将第一周期的绝缘子编号为1#、2#。系统启动后,在上位机进行初始化操作,初始化成功后,PLC控制程序启动。首先,机器人抓取两绝缘子(1#和2#),确保取料成功后,将1#放入清洗机,执行清洗任务;之后,机器人从清洗机中取出1#,放入2#绝缘子,在2#执行清洗任务同时1#放入检测机,执行检测任务;待2#和1#分别完成清洗和检测任务,机器人将2#从清洗机搬运至检测机,1#放到已完成物料台;当2#完成检测搬运至已完成物料台,至此完成一次循环,机器人重回到原点进行下一周期的任务,周而复始,直至所有绝缘子完成清洗及检测任务,实现流水线生产加工[11]。

图7 PLC程序流程
4 实验结果分析
如图9为系统平台,由图9(a)工作结构图可知,系统主要有检测机、清洗机、控制柜、上位机和机器人组成,图(b)为系统控制柜,控制柜主要有PLC控制器、继电器、空气开关和驱动器组成,其中,空气开关为整个系统的电路正常工作的保障,PLC为系统的核心,实现整个系统的动作流程控制。
4.1 绝缘子图像获取和处理
本系统设计了标准化的检测环境,一是光照采用的防水环形灯,光照强度900流明左右;二是自动喷淋装置采用雾化喷头,与绝缘子伞面距离在15mm~35mm之间,可调节达到最好的喷水效果;三是相机与伞面平行安装,与伞面距离可进行微调,使得被测伞面充满相机的取景框,获取绝缘子憎水性图像。
为了消除图像的外部干扰信息,增强所需的信息。首先,需要通过灰度化、直方图均衡和滤波等手段对绝缘子憎水性图像进行预处理[12~14]。本文复合绝缘子憎水性检测依次采用B通道分量法、直方图均衡化处理、中值滤波和谱聚类分割进行图像处理,谱聚类算法不受样本空间的限制,相比于传统的K均值算法对数据分布的适应性更强,其中Ncut算法效率优于FCM算法和K-means算法[15]。处理结果如图9所示。

图9 憎水性图像处理
4.2 憎水性等级判定
表征憎水性的因子很多,但都不能很高的映射其与等级之间的函数关系,因此以改进的形状因子法为基础进行等级判定。改进的形状因子法就是将最大水珠(水膜)的面积比和形状因子两个特征结合起来进行判定的一种方法[16],如表1所示,其中k和fc的取值分别为:

表1 改进的形状因子判定准则

式(1)、式(2)中k代表最大水珠/水膜的面积比;S表示最大水珠/水膜面积;s表示图像的总面积;其中面积都是以像素点计算的;l为最大水珠或水膜的周长。水滴越接近圆,fc的值就趋近于1,随着等级的增大,憎水性越来越小,相应fc的值越远离1。
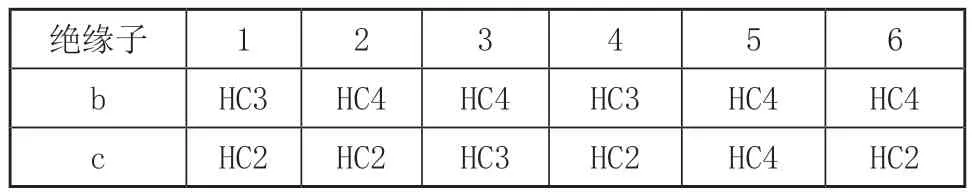
从某机务段选取三个复合绝缘子作为实验样本,在本系统设计的标准环境下进行憎水性等级检测。以表1的判定准则为基础,利用本系统的判定结果如表2所示,其中n、HC分别表示水珠数目和憎水性等级。由表2可知,所选择的三个复合绝缘子在上位机界面显示的憎水性等级依次为HC4、HC3和HC2。

表2 测量绝缘子的相关参数
与传统方法相对比,在开放的环境下,有6名工作人员采用喷水分级法对上述绝缘子进行憎水性判断,结果如图表3所示。由表可知,6名工作人员的判别结果不尽相同,但是总体的判断结果与本系统的检查结果是相同的,因而表明所提方法和本系统的检测结果是有效的。

表3 憎水性判断
(续)
5 结语
针对复合绝缘子在清洗和憎水性检测过程存在的工作效率和安全问题及难点,设计一套绝缘子集清洗及检测一体的智能系统。该系统采用PLC控制器、人机界面开发及图像处理技术研制的一款高自动化工厂使用设备,可实现对绝缘子的上料、清洗、检测和下料等功能,并且通过上位机可进行实时监控整个工作流程和憎水性等级。该系统弥补我国在绝缘子清洗及检测一体化自动化设备的技术空白,提好工作效率,降低人工成本。同时,通过实验证明系统在憎水性等级判定的准确性和合理性,不需要进行高压打压实验,避免了高压危险。该系统具有可观的产业化前景。
猜你喜欢
锻压装备与制造技术(2022年2期)2022-05-11
北京理工大学学报(2020年5期)2020-06-09
意林·全彩Color(2018年9期)2018-10-12
车迷(2018年12期)2018-07-26
筑路机械与施工机械化(2017年6期)2017-07-10
山东工业技术(2016年15期)2016-12-01
科学与财富(2016年28期)2016-10-14
女友·家园(2016年2期)2016-02-29
食品工业科技(2014年23期)2014-03-11
表面工程与再制造(2014年2期)2014-02-27
