
基于Inventor的斯特林发动机仿真分析
2022-06-28 17:46郑毅锋
制造业自动化 2022年6期
郑毅锋
(闽西职业技术学院 信息与制造学院,龙岩 364000)
0 引言
斯特林发动机是英国物理学家罗巴特·斯特林于1816年发明的,所以命名为“斯特林发动机”。斯特林发动机是一种外燃机,气体在热缸加热在冷缸冷却,使缸内气体体积不断发生交换和变化推动活塞工作,在不断反复的吸热膨胀、冷却收缩的循环过程中活塞实现往复连续做功;与传统内燃机比较,斯特林发动机的能量来源广泛,对能源杂质的要求也较为宽松,且运动过程噪音、振动小,周期平稳,因此常用在对安静、隐蔽性要求高的地方,如潜艇。由于热源可以布置在气缸外部,使热源的来源范围扩大,一些新能源如生物质能、地热,特别是太阳能等都可以作为斯特林发动机的动力。当前,世界对新能源的倡导给斯特林发动机带来了广阔的应用前景。
本文以一种斜盘式斯特林发动机为例,运用Autodesk Inventor软件,通过三维设计装配、运动仿真、应力分析等功能,对该斯特林发动机的斜盘和连杆机构进行仿真分析,并建立合理几何模型进行分析计算,为软件仿真提供一个有益的案例参考。图1即为通过Inventor三维设计软件建立的15°斜盘式斯特林发动机仿真模型。

图1 Inventor四缸斜盘式斯特林发动机模型
1 斜盘式斯特林发动机结构及原理
1.1 模型结构的组成
如图2所示,该斯特林发动机模型主要由上层壳体、下层壳体、斜盘轴、斜盘、滑动连杆、中间连杆、导向杆、导向块、活塞杆、热缸、换气活塞、压缩活塞等组成。
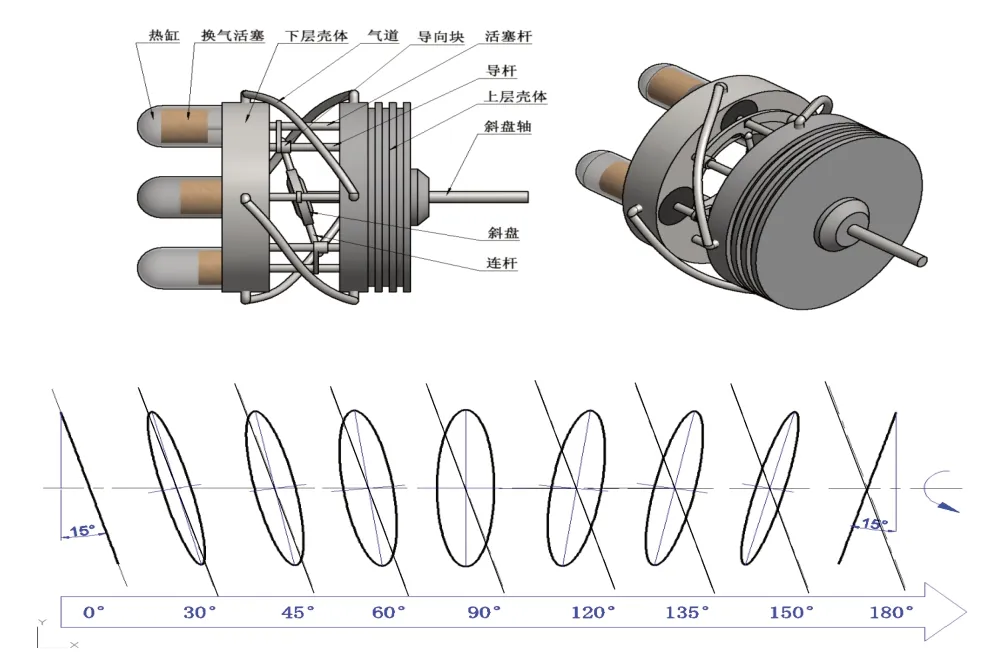
图2 斯特林发动机结构组成及斜盘位姿变化
上下壳体起保护支承作用,是整个斯特林发动机安装放置的固定结构,上层壳体还设计有散热片,用于安装冷却缸提高冷却效果;斜盘轴与斜盘采用滑动式轴承连接,当斜盘轴转动不同角度时通过滑动作用斜盘也产生不同的位姿变化,从而实现斜盘不同时刻的倾斜形状,如图所示为0°到180°的斜盘变化形状(正向);热缸和冷缸同轴对齐,共四对空间上成圆周均匀分布;冷缸与热缸间有气路相连且采用错位接法,通过气体热力循环作用驱动斜盘产生定向倾斜从而促使斜盘轴转动,最终将活塞的往复直线运动转换为斜盘轴的旋转运动(可逆);在两侧缸体上对称布置了两个弧形导向块,限制斜盘的转动自由度同时保证活塞杆轴向运动的平稳性;连杆的连接采用球面关节结构,以抵消斜盘倾斜带来的位姿扭转角度。
1.2 斜盘式结构驱动原理
斯特林发动机的样式有很多,工作原理基本相同:气体在热置换气缸内,受换气活塞的作用,在冷缸和热缸间来回流动,气体流动到热端时,受加热器加热膨胀,推动压缩活塞向前运动;当气体流动到冷端时,受冷收缩,压缩活塞向回运动。活塞运动就能向外做功,带动相应的机构运动,因为空气受冷受热都做功,所以斯特林发动机的能源利用率比内燃机高,内燃机工作时,高温的尾气带走了大量能量。
如图3所示的斜盘式斯特林工作原理图,1缸在换气活塞的作用下,热缸气体集中在加热端加热,气体受热膨胀通过气路向2缸冷缸移动,推动2缸的压缩活塞向上运动,带动斜盘在2缸处产生一个向上运动的趋势,此时斜盘轴带有右转趋势;同时在另一面,3缸在换气活塞的作用下,气体远离加热端,此时冷端起最大作用,气体冷却收缩使4缸的压缩活塞向下运动,带动斜盘在4缸处产生一个向下运动的趋势,这时斜盘轴也产生一个右转趋势如图右;最终两向相加并不矛盾,带动斜盘轴自左向右逆时针转动。

图3 斜盘式斯特林发动机工作原理
2 缸体与斜盘连接结构的设计
活塞与斜盘的连接采用了球面副关节的设计,四个缸位两两对称,两个使用导向杆约束,两个使用连杆约束,这里我们将按两种情况对斜盘的连接结构进行分析和设计。图4为斜盘连接结构的等效结构图:左右两缸为导向杆约束的1、3缸,前后两缸(下上)为连杆约束的2、4缸;每个缸位上连杆与活塞杆的倾角分别用α、β来表示。

图4 四缸斜盘等效结构简图
1)球面关节α
这里我们选用统一型号的球面副关节,初步设定球面关节容许倾斜角为30°,球面关节的实际参数及结构可以参考市面上球面关节产品的相关技术参数;
我们使用倾斜角为15°的斜盘进行仿真分析,斜盘倾角小于球面关节的容许倾角,即0°≤α≤15°<30°;对于α来讲,在导向柱的约束下1、3缸的球面关节实际倾角取决于斜盘的倾角大小,故α不会超出容许倾角范围,不需要进行复杂的设计计算;
2)连杆偏摆β
我们将斜盘的转动简化成如图所示的几何模型,图中SC=k(k为常数)为斜盘到缸体的中心距,是模型的固有结构参数,ω为圆盘转速,β=∠BCB′,B′为圆盘倾斜后B点的假设位置;β的大小将取决于连杆BC,这里我们仅分析如图所示位置的连接情况,对连杆BC进行分析计算;
圆盘在转动ω t后,沿当前位置的垂直方向旋转15°倾角,来模拟斜盘的转动过程,如图5所示;通过设计BC连杆的尺寸,以保证2、4缸球面关节的实际最大倾角小于容许倾斜角度,即在△S C B′中,∠BSB′+∠BCB′≤30°;为满足以上要求,现进行如下的设计计算:

图5 斜盘运动几何模型
在△SBD中,根据如图所示的几何投影关系:
∠BSD=ωt,DE=BDcos15°=SBsinωt·cos15°;
BE=BD(1-cos15°)=SBsinωt·(1-cos15°);
在直角△SED中,有:

在△SBE中,根据三角形正弦定理,有:

这时可以将sin∠BSE定义为一个关于ωt的函数F(ωt),则原式可记为∠BSE=arcsinF(ωt);
在△SCB′中,再使用三角形正弦定理,有:

又由已知约束条件∠BSB′+∠BCB′≤30°,
由三角形内外角关系有∠BSB′+∠BCB′=180°-∠SB′C≤30°;

这里我们引入一张正弦曲线图如图6所示,通过正弦曲线确定∠SB′C的区间;

图6 正弦曲线
对于三角形内角∠SB′C,满足条件的取值范围如阴影部分所示,故:

所以,当连杆BC的尺寸满足不等式条件时,球面关节可以在容许的倾斜角内转动,借此进行合理化结构设计。
3 斜盘结构的运动仿真与应力分析
3.1 运动仿真
为提高Inventor的运动仿真效果,我们先要进入软件的部件环节,将整个模型进行合理的装配约束,只留出斜盘轴的转动自由度;部分零件在确定无运动要求时可以采用固定功能锁住,注意确保各零件不会出现过约束或欠约束的情况,避免运动仿真时出现错误。以上准备工作完成后,可以进入软件“运动仿真”环境,在浏览器中选择斜盘轴的转动运动并设置特性,如设置初始位置90deg、驱动条件速度90deg/s、转矩无(外部载荷仅重力,缸体垂直放置);打开“仿真播放器”和“输出图示器”(图示器可打开多个),设定好播放参数后即可开启运动仿真,并可以在浏览器中自由勾选运动项目输出所需的波形曲线,这里我们列取4条与斜盘连接相关的项目曲线如图7所示。通过曲线图我们可以获取以下信息:

图7 输出图示器曲线
1)在一个周期循环内(4s),t=0,2,4时斜盘的受力较大;
2)球面副关节1的运动区间[73°,103°],球面副关节2的运动区间[-15°,15°],区间大小在容许的倾斜角度范围,连杆结构设计合理;
3)连杆的运动区间[-97°,-82.5°],得β的角度变化区间14.5°。
3.2 应力分析
以斜盘的应力分析为例,根据之前斜盘的运动仿真曲线,我们勾选t=2的位置作为时间点此时斜盘受力作用最大,建立时间点后“导出到FEA”并选中斜盘;退出环境“运动仿真”进入“应力分析”,创建“运动载荷分析”此时可以选择所要分析的零件以及时间点,如斜盘、t:2,点击“分析”即会出现如图8所示的应力分析分布图。根据应力分布图,我们可以进行直观的结构优化设计,比如斜盘内孔边缘应力相对集中,可以设计圆角或倒角结构分散应力;斜盘四周的圆孔朝上一面较为薄弱易发生变形,可以进行局部加厚,如在圆孔上方增加半圆型凸台等,根据多样的分析结果可以不断改进我们的模型达到优化结构目的。

图8 应力分析分布图
5 结语
应用Inventor三维建模和部件装配功能,构建了斜盘式斯特林发动机的基本模型,通过初步的几何计算确定模型关键参数,再运用运动仿真功能对缸体的往复运动和斜盘的转动过程进行了仿真,其中也包括了连杆的运动等,最后对斜盘结构又进行单独的应力分析,优化斜盘的受力结构。从总体的仿真分析结果来看,斯特林发动机模型的关键运动曲线符合设计参数要求,并且能够实现斜盘式机构的运动效果,零件的结构优化也能在模型上快速修改,运用Inventor软件大大提高了设计效率,为实际机构的设计选型提供了重要参考。
猜你喜欢
哈尔滨轴承(2022年1期)2022-05-23
军事文摘(2021年16期)2021-11-05
房地产导刊(2020年11期)2020-12-28
国际汉学(2020年1期)2020-05-21
NBA特刊(2018年17期)2018-11-24
北京航空航天大学学报(2017年1期)2017-11-24
汽车实用技术(2017年16期)2017-09-21
舰船科学技术(2016年1期)2016-02-27
汽车实用技术(2014年9期)2014-02-20
汽车与新动力(2012年5期)2012-03-25
