
基于潮流发电与蓄电池充电控制相结合的最大功率跟踪研究
2022-06-28 17:46王世明
制造业自动化 2022年6期
王世明,董 超
(上海海洋大学 工程学院,上海 201306)
0 引言
当今世界各国对能源匮乏的担心及对新能源的的研究的重视下,海洋能及其利用技术也在新能源发展的大潮流中作为新能源技术领域中储量巨大的新生力量也在世界各个国家的重视中取得了前所未有的大发展。现在潮流发电机大多采用直驱式同步发电机,由于是水流直接驱动水轮机带动发电机发电,中间没有升速齿轮箱,由于少了中间传动装置,所以直驱式的发电方式有更小的传动损耗,更高的可靠性。
最大功率跟踪最重要的是控制策略,有根据输入量发生剧烈变化时的跟踪算法设计[1,2],有根据实际使用的发电设备类型来设计控制策略[4~9],有根据实际使用的控制电路来设计控制方法的[5],还有根据多种控制方法相结合的算法[3,8]。综上这些方法几乎都是直接并网或没有考虑输出给谁用的问题,本论文结合爬山搜索法与蓄电池充电方法相结合的控制,从而实现更为简单的潮流能的利用。
对于双向直驱式潮流发电机来说,其输出的电压及频率大小易受流速的影响。而且潮流发电不想风力发电那样在陆地上,潮流发电有的可能在孤岛附近远离电网和用户,所以这就决定了潮流发电使用方式和风力发电存在不同。接下来将研究潮流发电设备给固定用电设备供电的控制问题,该论文的用电设备选用蓄电池,蓄电池的选择主要是考虑应用到小型单机发电设备上,及潮流发电的实际使用地方。当发电设备输出电能经过整流滤波,在经过BUCK-BOOST电压变换电路获得幅值满足要求(蓄电池充电要求)且基本稳定的直流电后给蓄电池充电。
现在,蓄电池充电最常用到的方法是分三个阶段充电:预充电(0.1C或0.2C的恒流),恒流阶段,恒压阶段。但由于潮流发电输出电压随流速变化的特点提出一种新的三阶段充电方法:预充电(0<I<0.2C),最大功率充电阶段,恒压阶段。这样充电的好处是在保护蓄电池的前提下尽可能的实现潮流发电设备最大功率的输出。
本文所采用的的最大功率跟踪控制通过改变BUCKBOOST电路的放大倍数来观察输出功率的变化。如果输出功率变大,那么继续朝着同样的方法改变放大倍数,如果输出功率减小,BUCK-BOOST的放大倍数朝着上次变化的反方向变化。
1 双向直驱式潮流发电设备的数学模型
1.1 水轮机模型
潮流发电系统的动力来源是捕捉水的动能,根据贝兹证明,水轮机从潮流能中捕获的功率如式(1)所示:

其中ρ为海水密度,v为流速,A为横流面积,Cp为潮流能利用系数,该式可以看成:

其中m为单位时间通过横流面积的海水质量,式(2)所表达的实际物理意义是:水流在流过叶轮的过程中一部分动能被叶轮吸收,一部分继续以动能的形式保留在水中。

λ为速尖比,wm为叶轮的角速度,R为叶轮半径,可知wmR为叶尖速度。
根据式(1)~式(4)能够得出当流速v为某一恒定值时P-wm的关系,如图1所示。

图1 水轮机某一风速下转速和输出功率的关系
水轮机Cp-λ曲线如图2所示,对一个确定的水轮机时,可以根据式(1)得出功率和的函数关系,从该式能够看出与的正比例关系即最大时P也最大。关于的关系可由式(3)得出,如图2所示。从图2可以看出,当速尖比为λopt时,潮流能利用系数最大为Cpmax。所以,对于一个确定的流速,只有在速尖比为λopt时输出功率P最大。

图2 水轮机 Cp-λ曲线
通过式(1)~式(3)便可得出P-λ的关系记如式(5)所示:

换句话说,当流速改变多少倍水轮机的角速度也得跟着改变多少倍即当:

将式(6)代入式(1)得输出功率最大如式(7)所示:

从动力学分析,水轮机另一个重要的物理量为水轮机转矩:

1.2 发电机模型
为了简化分析,由于本论文所研究的控制变量不在发电机上,所以将三相交流发电机和后面的整流滤波当做一个整体来分析,发电机模型采用下面公式计算,其中忽略各种损耗。
发电机的感应电动势公式如式(9)所示:

发电机电磁转矩公式如式(10)所示:

其中B、L为发电机参数,E为发电机感应电动势,I为发电机输出电流,R为发电机半径。
忽略发电机摩擦力,从动力学平衡角度分析如式(11)所示:

J为潮流发电机的转动惯量;由于从叶轮到发电机没有变速装置,所以叶轮和发电机的转速都为wm。
1.3 蓄电池模型
蓄电池模型采用以下简化电路模型(一个电阻r和电池VB串联,其中电池电压需要实时采集),如图3所示。

图3 蓄电池等效电路模型
其中电阻为蓄电池内阻,实际情况中内阻会随剩余电量的减少而增大,在本论文中为简化分析蓄电池内阻采用定值来计算。其中电池电压也会随蓄电池剩余电量的增加而增加,在本论文中电池电压通过实施采集蓄电池两端的电压代表。
1.4 BUCK-BOOST电路模型
其电压放大倍数用α表示。
图4为Buck-Boost电路拓扑,其工作原理:当PWM驱动为高电平时,MOS管T导通,MOS管T与电感L构成回。忽略MOS管的导通压降,电感上的电流线性增加(电流随时间增加的斜率,电感中储存的磁场能增加。当PWM驱动为低电平时,MOS管截止,电感L通过二极管构成回路,电感电流线性减小,电感中储存的磁场能转化为电场能。以电感为对象研究伏秒积平衡(左边电压为Vin,右边电压为Vout):Vin×ton=Vout×toff(其中ton为MOS管开通时间,toff为MOS管关断时间),可知其中D为占空比即,且记

图4 Buck-Boost电路拓扑
2 最大功率跟踪原理
根据前面的分析可知,最大功率是能量利用系数Cp的函数,当流速恒定时,潮流能利用系数Cp最大,潮流发电设备获得能量也就最大。而且,Cp是速尖比的λ函数,当λ最大时Cp也就最大,即当速尖比λ最大时潮流发电机获得的能量最大。

根据前面建立的各个部分的模型可以得到以下的系统模型:
将BUCK-BOOST电路看成是理想的变压电路,其变压比记为α。将变压电路右侧的电池的参数归算到变压电路左侧后,系统的等效电路如图6所示。

图6 等效电路
当流速一定时,发电机转速和变压电路放大倍数关系通过发电机的动力学分析得发电机因水而获得的动力转矩:

发电机受到的电磁转矩分析:
假设发电机的转速为w,由前面介绍的发电机模型可知发电机输出的电动势为:
E=BLV=BLRwm,根据系统的等效电路模型可知发电机输出的电流如式(13)所示:

发电机受到的电磁阻力如式(14)所示:

发电机受到的电磁转矩可以由式(13)、式(10)联立得出如式(15)所示:

将式(12)、式(15)联立:
所以通过流速仪将实施采集到的流速信号反馈到MPPT控制器,输出的PWM控制信号控制BUCk-BOOST升降压电路的放大倍数即可完成最大功率的跟踪。
3 仿真研究
3.1 仿真模型的搭建
为了验证上述分析的控制策略的有效性,本论文根据下图所示系统结构图及上面分析的算法在MATLAB/Simulink中搭建潮流发电系统的仿真。
水轮机采用上面介绍的水轮机模型。叶片半径:R=0.5m;最佳叶尖速比:λopt=5;最大潮流能利用系数Cpopt=0.4。发电机参数:磁场强度B=10;发电机长度L=0.5m;发电机直径为0.4m。蓄电池参数:内阻r=1Ω;额定电压V=24v。
3.2 仿真结果分析
图8为仿真时流速的阶跃流速信号,0~5s流速为4m/s,5s~10s流速为8m/s。
经过对潮流发电设备系统的分析,在理论层面解释的本论文所提出的控制方法的正确性。并通过在MATLAB/Simulink仿真平台搭建实验模型得出了如图7~图9所示的仿真结果。从图7、图8仿真的结果分析可知,两图中存在的过冲和震荡现象是由于潮流发电设备的转动惯量决定的,根据经典控制理论可知:转动惯量越大震荡和过冲所经历的时间也会越长。从上面的仿真结果可以看出,本论文所提出的根据对BUCK-BOOST电路的电压放大倍数的控制能够实现最大功率的跟踪。

图7 系统主电路及其控制策略

图8 流速阶跃变化示意图
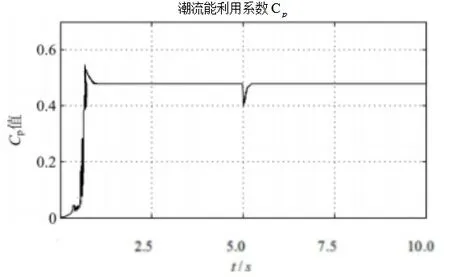
图9 潮流能利用系数变化曲线

图10 发电机转速曲线

图11 α的变化曲线
4 结语
本论文所提出的最大功率跟踪控制策略是通过对BUCK-BOOST电路中开关器件BJT的占空比的调节来实现的。该论文的控制通过对流速的测量作为该系统的输入,然后通过已知的系统最优速尖比来达到对开关电路的占空比进行控制,从而实现最大功率跟踪的目标。
该系统在实现最大功率跟踪的同时也改善了系统的动态特行,因为根据上面分析的流速和α的关系可以得出流速变化的大小决定α的大小即流速变化越大那么α的变化也就越大,再根据α与系统转矩的关系可知两者正相关,所以该控制方法能够改善潮流发电系统的动态性能即缩短动态的时间,这样就减小的后面电路对稳压的要求。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
建材发展导向(2021年13期)2021-07-28
大众科学(2020年7期)2020-10-26
小天使·六年级语数英综合(2018年1期)2018-10-08
足球周刊(2016年14期)2016-11-02
足球周刊(2016年15期)2016-11-02
